Как-то, давным-давно, обещал я рассказать об электропоезде «Сапсан». Пришло время выполнить свое обещание.

Для начала скажу, что речь не пойдет о дороговизне билетов, расписании этого поезда, о его уместности в инфраструктуре Октябрьской железной дороги. Пройдем мимо хайповых тем. Речь пойдет сугубо о технической стороне вопроса, затрагивающей в частности и тормоза. Но не только их.
Электропоезд «Сапсан» является локализованной версией семейства высокоскоростных поездов Velaro, на базе которого Siemens производит высокоскоростные поезда как для Deutsche Bahn (немецких железных дорог), так и много ещё для кого. У нас поезду дали обозначение ЭВС — Электропоезд Высокоскоростной Сименс. Дорога эксплуатирует два его варианта: ЭВС1 для участков, работающих на постоянном токе 3 кВ и ЭВС2 — двухсистемый электропоезд для сетей постоянного тока 3 кВ и переменного тока 25 кВ.
«Сапсану» присущи все характерные черты высокоскоростных поездов, сформировавшиеся за 56 лет эксплуатации этого вида транспорта в разных странах мира.
Во-первых, «Сапсан» — поезд постоянного формирования. В отличие от пригородных электропоездов («собак»), которые формируются из пар «моторный вагон + прицепной вагон» (плюс головные вагоны с кабиной управления), за счет чего можно формировать «электрички» разной длины, «Сапсан» является монолитной неразделяемой инженерной системой. Все вагоны в поезде эксплуатируются вместе. Поезд сформирован из десяти 4-х осных вагонов, средней массой 65 тонн, то есть масса поезда около 650 тонн, что соответствует статической нагрузке от одной колесной пары на рельс 16,3 тонн, при допускаемой для высокоскоростных поездов 18 тонн. Вагоны поезда цельнометаллические, с несущим кузовом.
Условно поезд можно разделить на две пятивагонные секции, симметричные по компоновке.
Компоновка электропоезда ЭВС1 для системы постоянного тока (кликабельно)

Каждый вагон в пятивагонной секции имеет свою «профессию»:
Компоновка двухсистемного электропоезда ЭВС2 (кликабельно)
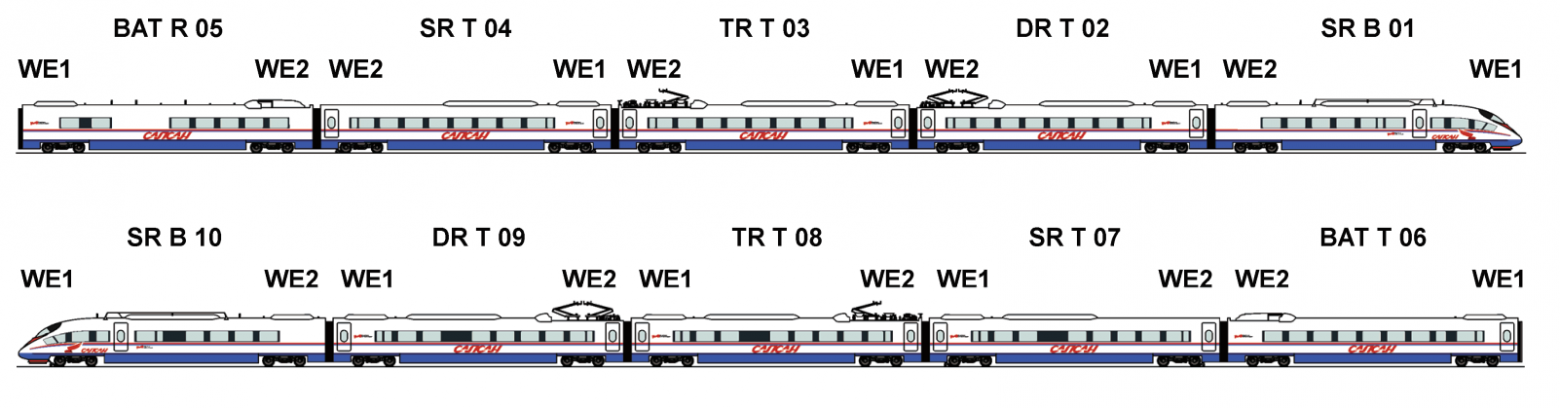
Другая секция из пяти вагонов, с 6-го по 10-й, устроена совершенно симметрично.
Основной объем в любом из вагонов занимает пассажирский салон, вместимость которого от вагона к вагону несколько отличается. Поэтому, для размещения оборудования остается только крыша и пространство под полом вагона. На крыше, главным образом размещаются токосъемные устройства, высоковольтные шины и аппараты защиты. Внизу, под полом вагона, в контейнерах размещено преобразующее и регулирующее оборудование, тормозное оборудование, вспомогательные машины. Кроме всего этого, на тележках моторных вагонов размещаются асинхронные тяговые двигатели мощностью по 510 кВт каждый (2 двигателя на тележку, по две тележки на вагон). Таким образом, полная мощность электропоезда составляет свыше 8 МВт. Максимальная касательная сила тяги — около 325 кН. Таким образом доступное при пуске максимальное ускорение равно 0,5 м/с2.
Что же, от общего обзора в стиле википедии, можно перейти к деталям.
Самый ответственный элемент в механической части поезда — экипажная часть, а именно тележка. Именно она обеспечивает образование и передачу на кузов тягового и тормозного усилия, ее элементы непосредственно взаимодействуют с верхним cтроением пути. При движении на высоких скоростях именно тут происходят самые интересные динамические процессы.
На «Сапсане» используется два типа тележек: тележка моторного вагона, и тележка прицепного вагона. Принципиальным и главным отличием одной от другой является наличие и отсутствие тягового привода. Наличие тягового привода определяет и разную конструкцию механики тормоза.
Общий вид тележки моторного вагона (кликабельно)
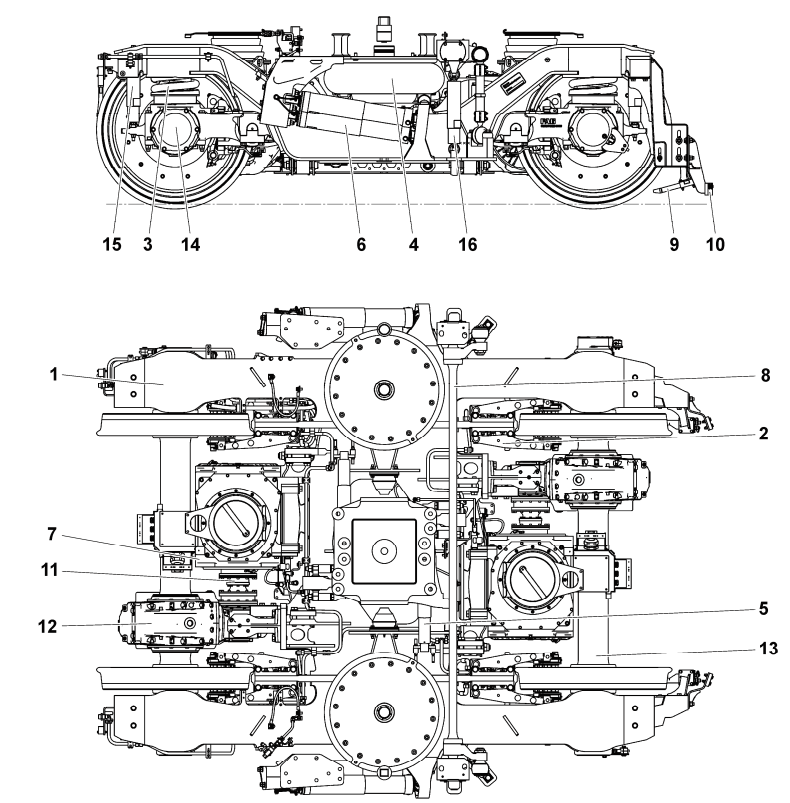
1 — рама тележки; 2 — клещевой механизм дискового тормоза; 3 — рессорное подвешивание 1-й тупени; 4 — пневморессора 2-й ступени; 5 — гаситель поперечных колебаний; 6 — демпфер виляния; 7 — тяговый электродвигатель (ТЭД); 8 — опора пружины качания; 9 — форсунка песочницы; 10 — путеочиститель (только на головных вагонах); 11 — зубчатая муфта поперечной компенсации; 12 — тяговый редуктор; 13 — колесная пара; 14 — буксовый узел; 15 — гаситель вертикальных колебаний 1-й ступени; 16 — гаситель вертикальных колебаний 2-й ступени;
Если посмотреть на эти чертежи, то видно, что тормозные диски моторной тележки установлены на колесные центры и на каждой колесной паре по два клещевых механизма, прижимающих колодки к дискам. Другую компоновку тормоза предусмотреть не получится — место между колесами плотно занято узлами тягового привода.
На необмоторенной колесной паре прицепного вагона тормозные диски напресованы на ось колесной пары, их по три на каждую колесную пару. Такое размещение дисков обеспечивает большую равномерность распределения тормозного момента вдоль оси, а так же несколько снижает требования к прочности самих дисков. Диски выполнены по вентилируемой схеме, даже на этом чертеже видны вентиляционные каналы в них.
Соответственно, эффективные радиусы трения для колодок на моторной и не моторной тележке находятся в соотношении 3/2, дабы обеспечить одинаковое тормозное усилие на той и другой тележке.
Общий вид тележки прицепного вагона (кликабельно)
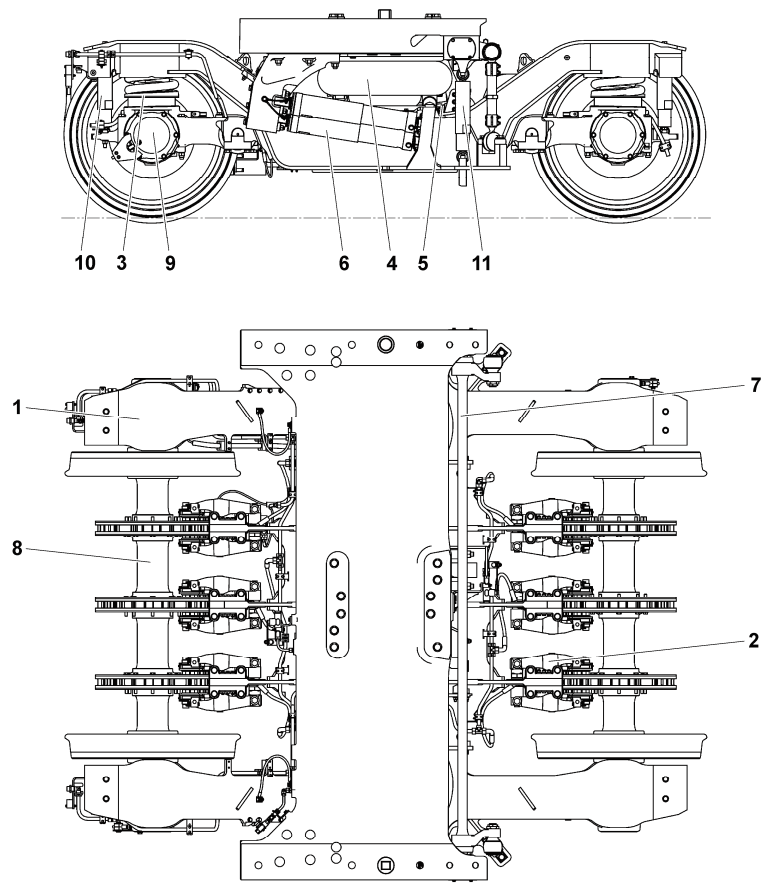
1 — рама тележки; 2 — клещевой механизм; 3 — рессорное подвешивание 1-й ступени; 4 — пневморессора 2-й ступени; 5 — гаситель поперечных колебаний; 6 — демпфер виляния; 7 — опора пружины качания; 8 — колесная пара; 9 — букса колесной пары; 10 — гаситель вертикальных колебаний 1-й ступени; 11 — гаситель вертикальных колебаний 2-й ступени.
Чем выше скорость движения экипажа по рельсам, тем более выражена роль динамических нагрузок в общей картине распределения усилий, приложенных к его элементам. Источником возникновения динамических нагрузок является ряд возмущающих факторов, главными из которых являются неровности верхнего строения пути в вертикальном и поперечном направлениях, а так же кинематическая склонность колесных пар к развитию их поперечных колебаний в колее, за счет конической формы поверхности катания.
Если с первым все понятно, то со вторым — что я имел в виду? И зачем вообще железнодорожные колеса имеют коническую форму?
В колесной паре оба колеса жестко связаны между собой через ось, а значит, пренебрегая крутильной упругостью оси, можно считать, что оба колеса имеют одинаковую угловую скорость. Всегда. И при движении в прямом участке пути всё будет отлично. А если мы поедем в кривой? Вот тут, для того чтобы внутреннее колесо (ближнее к центру поворота) не проскальзывало, скорость его центра должна быть меньше скорости центра внешнего колеса. Если бы колеса не были связаны жестко, то так и получилось бы — внутреннее колесо стало бы вращаться медленнее внешнего. Но так как существует жесткая связь, внутреннее колесо начнет проскальзывать, а ось колесной пары испытывать серьезные нагрузки на кручение.
Чтобы избежать этого придумали остроумное решение — раз нельзя уменьшить угловую скорость внутреннего колеса, то тогда можно уменьшить его радиус! Уменьшить радиус внутреннего колеса, а радиус внешнего — увеличить, и тогда произойдет перераспределение скоростей центров колес, обеспечивая лучшие условия прохождения поворота в части проскальзывания и динамических нагрузок на ось. Для этого поверхность катания колес делается конической. При этом, как нетрудно сообразить, при входе в кривую, колесная пара смещается в поперечном направлении в сторону противоположную центру поворота. Выйдя из равновесного состояния, свободная колесная пара продолжит совершать поперечные колебания даже в прямом участке пути, с частотой тем большей, чем больше скорость её вращения.
Конечно, в реальных условиях это перемещение ограничивается буксовыми узлами, но, становится очевидным, что жесткость конструкции поперечных связей в тележке не должна быть чрезмерно высокой, поэтому поводки букс крепятся к раме через сайлентблоки. Кроме того, в буксовых узлах обеспечивается возможность смещения оси колесной пары — так называемый поперечный разбег.
Все эти факторы приводят к тому, что элементы ходовой части совершают сложные пространственные колебания, неизбежные при присутствии в связях между ними упругих элементов, обеспечивающих податливость конструкции в направлении действия динамических нагрузок. Колебания эти необходимо гасить, поэтому тележка «Сапсана» буквально обвешана гидравлическими гасителями. Кроме того, система управления электропоезда оценивает характеристики колебаний в реальном времени, делая вывод об устойчивости движения тележки в колее.
Описанию механики движения высокоскоростного поезда лучше посвятить отдельную статью, в рамках этой сложно будет рассказать обо всех нюансах, которые безусловно интересны. Пока только скажу, что механическая часть поезда, унаследованная от предка — немецкого ICE3, вполне рассчитана на скорости движения до 350 км/ч.
Проще всего описать схему двухсистемного электропоезда ЭВС2 — односистемый ЭВС1 отличается от него отсутствием оборудования для работы на переменном токе.
Функциональная схема силовых цепей электропоезда ЭВС2 (кликабельно)
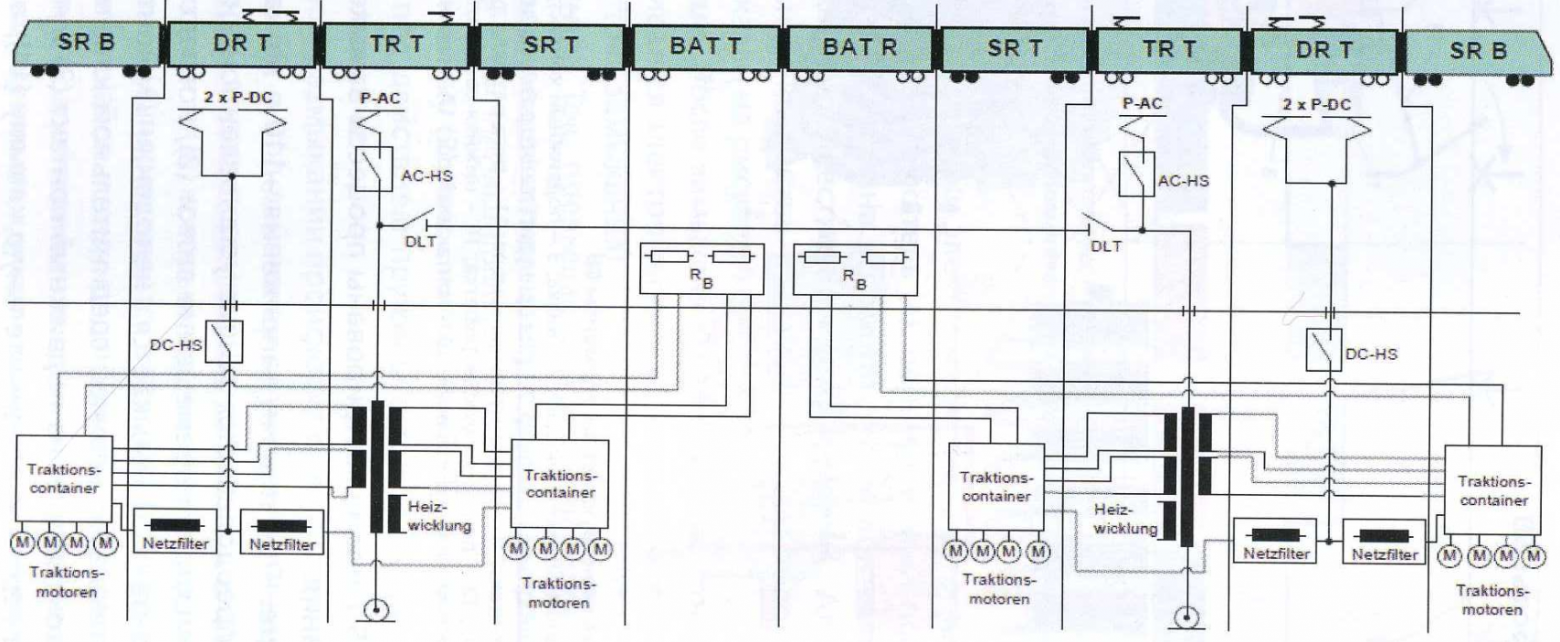
Traktions container — контейнер тягового преобразователя; Netzfilter — сетевой фильтр; Traktions motoren — тяговые двигатели
При работе на переменном токе, напряжение снимается из контактной сети одним из токоприемников переменного тока P-AC, и через главный выключатель AC-HS и крышевой ввод попадает в третий (или восьмой) вагон электропоезда. Токоприемников переменного тока на поезде два — поднимается задний по ходу движения токоприемник, второй выступает в качестве резервного и вступает в дело при повреждении основного токоприемника. Питание на секцию с опущенным токоприемником подается по крышевой высоковольтной шине, через пару разъединителей DLT. Переменное напряжение 25 кВ, 50 Гц, поступает на первичную обмотку тягового трансформатора, понижается им, и от четырех вторичных полуобмоток подается в контейнеры тяговых преобразователей (Traktions container). Там это напряжение выпрямляется четырехквадрантными преобразователями (4QS-преобразователи), подаваясь на вход звена постоянного тока, и далее на автономный инвертор напряжения (АИН) PWR, питающий тяговые двигатели.
Не следует путать 4QS-преобразователь с управляемым выпрямителем. Выпрямитель, в том числе управляемый, всегда является понижающим AC-DC преобразователем, в то время как 4QS-преобразователь, кроме того что может работать как управляемый выпрямитель, является ещё и повышающим AC-DC преобразователем, за счет наличия в его схеме контура короткого замыкания с индуктивным дросселем и специального алгоритма управления ключами. Подробнее о принципе его работы можно почитать, например, тут, так как в задачу данной статьи не входит описание принципов построения силовых преобразователей. Тем не менее, отмечу, что напряжение (действующее) на вторичной полуобмотке тягового трансформатора равно 1550 В, при этом с выхода 4QS-преобразователя снимается напряжение постоянного тока 3 кВ. За счет данного преобразователя, система управления стабилизирует напряжение в звене постоянного тока, вне зависимости от колебаний напряжения в тяговой сети (от 19 до 29 кВ).
Упрощенная схема силовой цепи при питании переменным током (кликабельно)
Часть схемы со звеном постоянного тока и АИН у ЭВС1 и ЭВС2 совершенно идентична, за исключением того, что при питании от постоянного тока, АИН вынужден довольствоваться тем напряжением постоянного тока, которое приготовила ему тяговая подстанция. С учетом тяги других поездов на участке, рабочие пределы его изменения от 2,2 до 4 кВ.
При работе на постоянном токе, каждая секция поезда питается от своего токоприемника постоянного тока P-DC. Таких токоприемников на поезде четыре, они попарно расположены на втором и девятом вагоне. В нормальной работе поднимается задний по ходу движения токоприемник в каждой пятивагонной секции. Второй токоприемник в паре является резервным.
Упрощенная схема силовой цепи при питании постоянным током (кликабельно)
Почему на постоянном токе поднимают два токоприемника? Потому, что действующее значение напряжения в сети постоянного тока (3 кВ) меньше действующего значения напряжения в сети переменного тока (25 кВ) в 8,3 раза. При одинаковой потребляемой из сети мощности, ток текущий через токоприемник постоянного тока будет выше во столько же раз. По правде несколько не совсем так, нужно еще учитывать реактивую мощность в цепи переменного тока, однако, если использовать один токоприемник, он получится и массивным, и протекание всего тягового тока может вызвать пережог контактного провода в месте токосъема, поэтому тяговый ток уполовинивают, питая каждую секцию от своего токоприемника.
Итак, постоянный ток, через токоприемник P-DC и быстродействующий выключатель DC-HS подается на отпайку плюсового провода звена постоянного тока тягового преобразователя и подается на вход автономного инвертора напряжения (АИН) PWR. АИН преобразует постоянный ток в переменный трехфазный, с изменяющейся частотой и амплитудой напряжения, за счет чего осуществляется регулирование тягового усилия, развиваемого тяговыми электродвигателями (ТЭД).
Рассмотренная схема обеспечивает режим тяги, так и режим электродинамического торможения, которое на «Сапсане» рекуперативно-реостатное.
При возможности выполнять рекуперацию (исправные силовые цепи и ненасыщенная контактная сеть с напряжением на постоянном токе менее 4кВ, на переменном — менее 29 кВ) выполняется рекуперативное торможение. АИН работает как регулируемый трехфазный выпрямитель по схеме Ларионова, преобразуя трехфазное напряжение, вырабатываемое ТЭД в постоянный ток, которое при работе на постоянном токе отдается в сеть, а при работе на переменном — преобразуется в однофазное напряжение 4QS-преобразователем, работающим в режиме инвертора, обеспечивающего компенсацию реактивной мощности, значение коэффициента мощности максимально близким к единице (пресловутый «косинус фи»). Далее, повышенное тяговым трансформатором напряжение, выдается в сеть.
При срыве рекуперации, энергия, преобразованная АИН, перераспределяется на тормозной резистор RB. Для решения этой задачи в звене постоянного тока в силовую цепь включен импульсный регулятор напряжения (ИР), представляющий собой транзисторный понижающий DC-DC преобразователь, основная задача которого — регулирование тока, протекающего через тормозной резистор.
Каждый тяговый преобразователь имеет индивидуальный тормозной резистор, которые собраны в блоки и располагаются под защитным обтекателем с жалюзи на крышах пятого и шестого вагонов.
Таким образом, каждый из четырех моторных вагона электропоезда оснащен одним тяговым преобразователем, обеспечивающим работу четырех тяговых двигателей в режиме тяги и электродинамического торможения. Из сорока осей в поезде, 16 осей оснащены тяговым приводом, общей мощностью 8 МВт в режиме тяги и рекуперации и 3,2 МВт в режиме реостатного торможения (40% мощности за счет ограничения тока через тормозные резисторы).
Приведу тяговую характеристику поезда — зависимость силы тяги от скорости (кликабельно)
Из этого графика, в частности, видно, что электропоезд способен разогнаться до скорости свыше 300 км/ч на площадке, а на подъеме в 10 тысячных поддерживать скорость 230 км/ч.
При исправном одном моторном вагоне (25% мощности) поезд на площадке вполне легко пойдет со скоростью 180 км/ч, а на подъем в 10 тысячный будет уверенно ехать со скоростью 80 км/ч.
Все вышесказанное говорит о том, что поезд располагает запасом мощности, и способен на гораздо более высокие эксплуатационные показатели, чем он демонстрирует сейчас.
Ограничение в 250 км/ч введено искусственно в системе управления тягой, из-за отсутствия на наших дорогах инфраструктуры для движения с большими скоростями. После модернизации участка Москва — Санкт-Петербург, однако, «Сапсан» (при отключенной системе АУДиТ — Автоматическое Управление Движением и Торможением, как раз и не дающей разогнаться выше 250) достиг скорости 291 км/ч. Быстрее по нашим железным дорогам пока никто не ездил.
Рассмотрим общие черты тормозов. Электропоезд оснащен несколькими тормозными системами:
В штатном режиме использование этих тормозных систем выполняется системой управления. В соответствии с состоянием органом управления на пульте машиниста, задания, формируемое подсистемой АУДиТ — Автоматическое Управление Движением и Торможением, а так же подсистемой автоведения, происходит выбор рабочей тормозной системы и уровень тормозного усилия ей обеспечиваемый.
Управление движением, в том числе и торможением, обеспечивается тремя рукоятками на пульте машиниста. При этом различают несколько режимов регулирования скорости:
Кабина электропоезда «Сапсан» (кликабельно)

1 — задатчик скорости; 2 — дисплейный модуль устройства безопасности КЛУБ-У; 3 — задатчик силы тяги; 4 — тормозной контроллер (задатчик тормозного ускорения); 5 — реверсивный переключатель; 6 — дисплей интерфейса «человек-машина»; 7 — тормозной дисплей.
В любом из перечисленных режимов управления, система управления тормозами руководствуется, прежде всего, величиной заданного ускорения, которое, в ручном режиме, в зависимости от положения рукоятки контроллера и скорости поезда определяется по следующим кривым
Кривые заданного тормозного ускорения (кликабельно)
Для обеспечения заданного ускорения приводятся в действие тормоза, причем приоритетным рабочим тормозом является электродинамический рекуперативный тормоз (ЭДТ) на моторных вагонах.
Естественно и логично отдавать приоритет ЭДТ, так как 40% вагонов поезда являются моторными, при этом ЭДТ обеспечивает довольно существенное тормозное усилие. О мощности ЭДТ на «Сапсане» можно судить по его тормозной характеристике
Тормозные характеристики электропоезда в режиме ЭДТ (кликабельно)
В режиме рекуперативного торможения, на скорости 250 км/ч, ЭДТ обеспечивает поезду тормозное ускорение -0,18 м/с2, при меньших скоростях его эффективность повышается до -0,5 м/с2.
При недостаточной эффективности ЭДТ, приводятся в действие пневматические (ПТ) или электропневматические (ЭПТ) тормоза на прицепных вагонах — моторные продолжают использовать ЭДТ. При этом тормозное усилие регулируется таким образом, чтобы, опять таки, поддерживать заданное ускорение. При превышении ускорения над заданным значением, прежде всего отпускаются пневматические тормоза. Система стремится, таким образом, максимально использовать возможности электрического тормоза.
При скорости ниже 3 км/ч, выполняется замещение электродинамического тормоза пневматическим. При снижении эффективности ЭДТ на каком либо из моторных вагонов, конкретно на этом вагоне выполняется замещение ЭДТ на ПТ/ЭПТ.
Об этих системах следует поговорить подробнее, даже вне рамок данной статьи. В этой же статье поговорим об общих принципах реализации автоматических тормозов на «Сапсане».
Высокоскоростное движение предъявляет к пневматическим и электропневматическим тормозам обязательное требование — любое торможение с применением ПТ/ЭПТ должно происходить с обязательной разрядкой тормозной магистрали служебным темпом!
Исходя из данного требования, торможение всегда осуществляется путем разрядки тормозной магистрали с последующим срабатыванием на каждом вагоне воздухораспределителя (ВР), набирающего тормозные цилиндры из запасного резервуара (ЗР). Даже если это торможение электропневматическое.
При работе ЭПТ происходит одновременная разрядка тормозной магистрали на всех вагонах, локально, в месте подключения к ней воздухораспределителя, выполняемая электропневматическими вентилями. Этим обеспечивается одновременность их срабатывания, но и только! Воздухораспределитель реагирует только на разрядку тормозной магистрали. Конструкций подобных нашему пассажирскому ЭПТ, где разрядки ТМ практически не происходит, а наполнение тормозных цилиндров ведется из запасного резервуара непосредственно электровоздухораспределителем, с одновременной подпиткой ЗР из ТМ, вы на высокоскоростных поездах не увидите.
При выключении ЭПТ, разрядка тормозной магистрали выполняется с головы поезда, со стороны рабочей кабины, устройством, по своему действию аналогичным крану машиниста, именуемым блок управления тормозной магистралью (БУТМ). Посмотрим на схему тормозов головного вагона
Упрощенная схема тормозов головного моторного вагона (кликабельно)

Зарядное давление тормозной магистрали на «Сапсане» равно 0,5 МПа. Система управления, через электропнематические вентили, снижает давление в уравнительном резервуаре (УР) служебным темпом. В след за этим, БУТМ, стремясь поддерживать давление в тормозной магистрали давлению в УР, снижает давление и в ней служебным темпом.
Воздухораспределитель срабатывает на торможение. Но он не наполняет тормозные цилиндры! Он создает в своей тормозной камере давление, равное тому, которое должно установится в тормозных цилиндрах! За наполнение ТЦ отвечает преобразователь давления (ПД), работающий как пневматическое реле. Тормозная камера ВР соединена с рабочей камерой ПД трубопроводом, через запирающий электропневматический вентиль.
При подаче питания на этот вентиль, он перекрывает трубопровод и сбрасывает давление из рабочей камеры ПД, что приводит к отпуску тормозов даже при сработавшем на торможении воздухораспределителе. Питание на этот вентиль подается, если на вагоне работает электрический тормоз. Если электрический тормоз не работает, питание с этого вентиля снимается и происходит наполнение тормозных цилиндров до давления, заданного от ВР.
Замечу также и то, что запасный резервуар, непрерывно, через обратный клапан, отпитывается от питательной магистрали (ПМ), где поддерживается давление от 0,8 до 1 МПа, за счет работы компрессора. Давление в ЗР лежит в этих же пределах, так что пневматический тормоз электропоезда является неистощимым. В отличие от поездов с локомотивной тягой, питательная магистраль проходит через все вагоны электропоезда.
Схема тормозов моторного промежуточного вагона выглядит также, как и на головном, за исключением того что там отсутствует БУТМ. На прицепном вагоне установлено 6 тормозных цилиндров, вместо четырех на моторном, в остальном, его устройство в части тормоза, аналогично устройству моторного промежуточного вагона.
Следует отметить, что воздухораспределитель, обозначаемый страшной аббривеатурой KEdSo-EAE, производства Knorr Bremse, в отличие от ВР 242, принятого у нас, имеет ступенчатый пневматический отпуск, за счет того, что работает на разнице не двух давления (в ТМ и ЗР), а трех давлений: в тормозной магистрали (ТМ), рабочей камере (РК) и тормозной камере (ТК). В РК сохраняется давление равное зарядному, что позволяет выполнять отпуск ступенями.
Эта особенность идет от того, что на европейских дорогах ВР (серии KE) унифицированы между грузовыми и пассажирскими поездами, да и грузовые поезда короткие, так что для пневматического торможения в них нет нужды в монстрах типа ВР 483.
Второй нюанс — БУТМ, который является по сути не просто тормозным краном с дистанционным управлением, а управляется опосредованно, через систему управления поездом, которая сама, без участия машиниста решает, когда и насколько разрядить тормозную магистраль, чтобы обеспечить требуемое ускорение (заданное машинистом, подсистемой АУДиТ или системой автоведения), а так и когда отпустить тормоза, тоже принимает решение электроника.
А что делать, если «эта ваша электроника» выйдет из строя? Во-первых, есть режим экстренного торможения (ЭТ). Реализуется он безо всякой электроники — машинист, переведя контроллер в положение ЭТ, механическим клапаном открывает огромную дыру в тормозной магистрали. Справа, на тумбе, установлен второй клапан, выполняющий ту же функцию — нажатие на ударную кнопку открывает ТМ в атмосферу. Естественно, существует и ряд электрических цепей, образующих так называемую ПЭТ — Петлю Экстренного Торможения. Но её функция вторична, поезд может быть остановлен и без неё.
Вторым способом, уже после ЭТ и откачки поезда, если надо довести поезд до депо без вызова вспомогательного локомотива, является использование крана резервного управления. Он установлен справа от машиниста на боковой тумбе и имеет три положения: О — отпуск, П — перекрыша, Т — торможение. Этот кран позволяет вручную, пневмо-механически регулировать давление в ТМ, выполняя торможение и отпуск тормозов.
Думаю, вышел неплохой обзор, думаю, статья будет интересна и полезна для любителей железной дороги. Пока я работал над ней, понял, что одной статьи для «Сапсана» будет мало. Поэтому, первая статья вышла пилотной, дающей общее представление об этом поезде, являющем собой сплав великолепной точной механики, современной силовой электроники и информационных технологий. Поэтому, спасибо за внимание и…
На закуску — предлагаю вашему вниманию видеоэкскурсию на тренажер «Сапсана», руководителем разработки которого является ваш покорный слуга
Продолжение следует...
Для начала скажу, что речь не пойдет о дороговизне билетов, расписании этого поезда, о его уместности в инфраструктуре Октябрьской железной дороги. Пройдем мимо хайповых тем. Речь пойдет сугубо о технической стороне вопроса, затрагивающей в частности и тормоза. Но не только их.
1. Немного общих цифр
Электропоезд «Сапсан» является локализованной версией семейства высокоскоростных поездов Velaro, на базе которого Siemens производит высокоскоростные поезда как для Deutsche Bahn (немецких железных дорог), так и много ещё для кого. У нас поезду дали обозначение ЭВС — Электропоезд Высокоскоростной Сименс. Дорога эксплуатирует два его варианта: ЭВС1 для участков, работающих на постоянном токе 3 кВ и ЭВС2 — двухсистемый электропоезд для сетей постоянного тока 3 кВ и переменного тока 25 кВ.
«Сапсану» присущи все характерные черты высокоскоростных поездов, сформировавшиеся за 56 лет эксплуатации этого вида транспорта в разных странах мира.
Во-первых, «Сапсан» — поезд постоянного формирования. В отличие от пригородных электропоездов («собак»), которые формируются из пар «моторный вагон + прицепной вагон» (плюс головные вагоны с кабиной управления), за счет чего можно формировать «электрички» разной длины, «Сапсан» является монолитной неразделяемой инженерной системой. Все вагоны в поезде эксплуатируются вместе. Поезд сформирован из десяти 4-х осных вагонов, средней массой 65 тонн, то есть масса поезда около 650 тонн, что соответствует статической нагрузке от одной колесной пары на рельс 16,3 тонн, при допускаемой для высокоскоростных поездов 18 тонн. Вагоны поезда цельнометаллические, с несущим кузовом.
Условно поезд можно разделить на две пятивагонные секции, симметричные по компоновке.
Компоновка электропоезда ЭВС1 для системы постоянного тока (кликабельно)

Каждый вагон в пятивагонной секции имеет свою «профессию»:
- Головной моторный (SR B) — в этом вагоне располагается кабина управления, тяговый преобразователь и четыре тяговых двигателя
- Промежуточный прицепной (DR T) — здесь расположены два токоприемника постоянного тока и быстродействующий выключатель, для защиты силовых цепей от перегрузки
- Промежуточный прицепной, на ЭВС1 имеющий обозначение MW T. На двухсистемном ЭВС2 в этом вагоне расположен тяговый трансформатор, главный выключатель и токоприемник переменного тока, и тогда этот вагон обозначается TR T — «трансформаторный»
- Промежуточный моторный (SR T) — здесь «едет» тяговый преобразователь, питающий четыре двигателя
- Промежуточный прицепной (BAT R) — в этом вагоне расположены аккумуляторная батарея и преобразователи собственных нужд, вырабатывающие напряжение 110 В постоянного тока, для питания цепей управления и трехфазное напряжение переменного тока 440 В, 60 Гц, для питания вспомогательных машин. В этом вагоне также расположены и тормозные резисторы.
Компоновка двухсистемного электропоезда ЭВС2 (кликабельно)
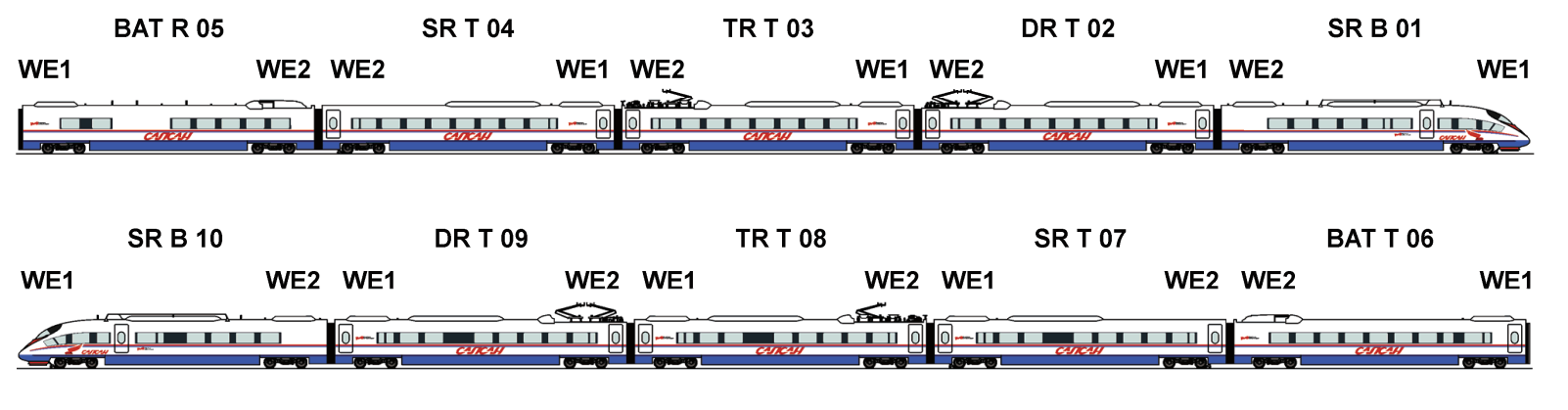
Другая секция из пяти вагонов, с 6-го по 10-й, устроена совершенно симметрично.
Основной объем в любом из вагонов занимает пассажирский салон, вместимость которого от вагона к вагону несколько отличается. Поэтому, для размещения оборудования остается только крыша и пространство под полом вагона. На крыше, главным образом размещаются токосъемные устройства, высоковольтные шины и аппараты защиты. Внизу, под полом вагона, в контейнерах размещено преобразующее и регулирующее оборудование, тормозное оборудование, вспомогательные машины. Кроме всего этого, на тележках моторных вагонов размещаются асинхронные тяговые двигатели мощностью по 510 кВт каждый (2 двигателя на тележку, по две тележки на вагон). Таким образом, полная мощность электропоезда составляет свыше 8 МВт. Максимальная касательная сила тяги — около 325 кН. Таким образом доступное при пуске максимальное ускорение равно 0,5 м/с2.
Что же, от общего обзора в стиле википедии, можно перейти к деталям.
2. Механическая часть
Самый ответственный элемент в механической части поезда — экипажная часть, а именно тележка. Именно она обеспечивает образование и передачу на кузов тягового и тормозного усилия, ее элементы непосредственно взаимодействуют с верхним cтроением пути. При движении на высоких скоростях именно тут происходят самые интересные динамические процессы.
На «Сапсане» используется два типа тележек: тележка моторного вагона, и тележка прицепного вагона. Принципиальным и главным отличием одной от другой является наличие и отсутствие тягового привода. Наличие тягового привода определяет и разную конструкцию механики тормоза.
Общий вид тележки моторного вагона (кликабельно)
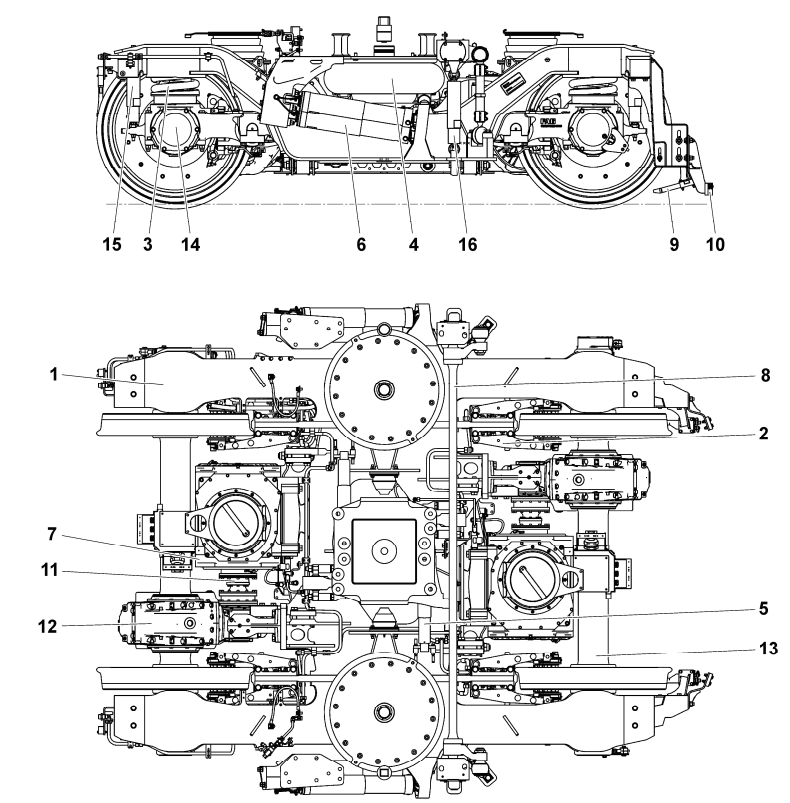
1 — рама тележки; 2 — клещевой механизм дискового тормоза; 3 — рессорное подвешивание 1-й тупени; 4 — пневморессора 2-й ступени; 5 — гаситель поперечных колебаний; 6 — демпфер виляния; 7 — тяговый электродвигатель (ТЭД); 8 — опора пружины качания; 9 — форсунка песочницы; 10 — путеочиститель (только на головных вагонах); 11 — зубчатая муфта поперечной компенсации; 12 — тяговый редуктор; 13 — колесная пара; 14 — буксовый узел; 15 — гаситель вертикальных колебаний 1-й ступени; 16 — гаситель вертикальных колебаний 2-й ступени;
Если посмотреть на эти чертежи, то видно, что тормозные диски моторной тележки установлены на колесные центры и на каждой колесной паре по два клещевых механизма, прижимающих колодки к дискам. Другую компоновку тормоза предусмотреть не получится — место между колесами плотно занято узлами тягового привода.
На необмоторенной колесной паре прицепного вагона тормозные диски напресованы на ось колесной пары, их по три на каждую колесную пару. Такое размещение дисков обеспечивает большую равномерность распределения тормозного момента вдоль оси, а так же несколько снижает требования к прочности самих дисков. Диски выполнены по вентилируемой схеме, даже на этом чертеже видны вентиляционные каналы в них.
Соответственно, эффективные радиусы трения для колодок на моторной и не моторной тележке находятся в соотношении 3/2, дабы обеспечить одинаковое тормозное усилие на той и другой тележке.
Общий вид тележки прицепного вагона (кликабельно)
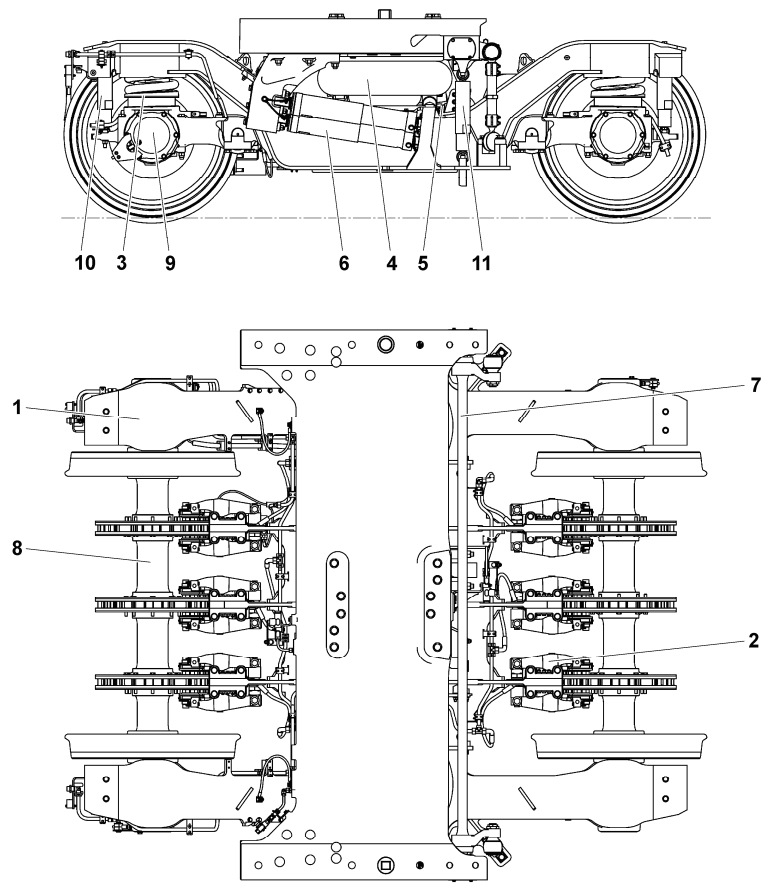
1 — рама тележки; 2 — клещевой механизм; 3 — рессорное подвешивание 1-й ступени; 4 — пневморессора 2-й ступени; 5 — гаситель поперечных колебаний; 6 — демпфер виляния; 7 — опора пружины качания; 8 — колесная пара; 9 — букса колесной пары; 10 — гаситель вертикальных колебаний 1-й ступени; 11 — гаситель вертикальных колебаний 2-й ступени.
Чем выше скорость движения экипажа по рельсам, тем более выражена роль динамических нагрузок в общей картине распределения усилий, приложенных к его элементам. Источником возникновения динамических нагрузок является ряд возмущающих факторов, главными из которых являются неровности верхнего строения пути в вертикальном и поперечном направлениях, а так же кинематическая склонность колесных пар к развитию их поперечных колебаний в колее, за счет конической формы поверхности катания.
Если с первым все понятно, то со вторым — что я имел в виду? И зачем вообще железнодорожные колеса имеют коническую форму?
В колесной паре оба колеса жестко связаны между собой через ось, а значит, пренебрегая крутильной упругостью оси, можно считать, что оба колеса имеют одинаковую угловую скорость. Всегда. И при движении в прямом участке пути всё будет отлично. А если мы поедем в кривой? Вот тут, для того чтобы внутреннее колесо (ближнее к центру поворота) не проскальзывало, скорость его центра должна быть меньше скорости центра внешнего колеса. Если бы колеса не были связаны жестко, то так и получилось бы — внутреннее колесо стало бы вращаться медленнее внешнего. Но так как существует жесткая связь, внутреннее колесо начнет проскальзывать, а ось колесной пары испытывать серьезные нагрузки на кручение.
Чтобы избежать этого придумали остроумное решение — раз нельзя уменьшить угловую скорость внутреннего колеса, то тогда можно уменьшить его радиус! Уменьшить радиус внутреннего колеса, а радиус внешнего — увеличить, и тогда произойдет перераспределение скоростей центров колес, обеспечивая лучшие условия прохождения поворота в части проскальзывания и динамических нагрузок на ось. Для этого поверхность катания колес делается конической. При этом, как нетрудно сообразить, при входе в кривую, колесная пара смещается в поперечном направлении в сторону противоположную центру поворота. Выйдя из равновесного состояния, свободная колесная пара продолжит совершать поперечные колебания даже в прямом участке пути, с частотой тем большей, чем больше скорость её вращения.
Конечно, в реальных условиях это перемещение ограничивается буксовыми узлами, но, становится очевидным, что жесткость конструкции поперечных связей в тележке не должна быть чрезмерно высокой, поэтому поводки букс крепятся к раме через сайлентблоки. Кроме того, в буксовых узлах обеспечивается возможность смещения оси колесной пары — так называемый поперечный разбег.
Все эти факторы приводят к тому, что элементы ходовой части совершают сложные пространственные колебания, неизбежные при присутствии в связях между ними упругих элементов, обеспечивающих податливость конструкции в направлении действия динамических нагрузок. Колебания эти необходимо гасить, поэтому тележка «Сапсана» буквально обвешана гидравлическими гасителями. Кроме того, система управления электропоезда оценивает характеристики колебаний в реальном времени, делая вывод об устойчивости движения тележки в колее.
Описанию механики движения высокоскоростного поезда лучше посвятить отдельную статью, в рамках этой сложно будет рассказать обо всех нюансах, которые безусловно интересны. Пока только скажу, что механическая часть поезда, унаследованная от предка — немецкого ICE3, вполне рассчитана на скорости движения до 350 км/ч.
3. Силовая электрическая схема
Проще всего описать схему двухсистемного электропоезда ЭВС2 — односистемый ЭВС1 отличается от него отсутствием оборудования для работы на переменном токе.
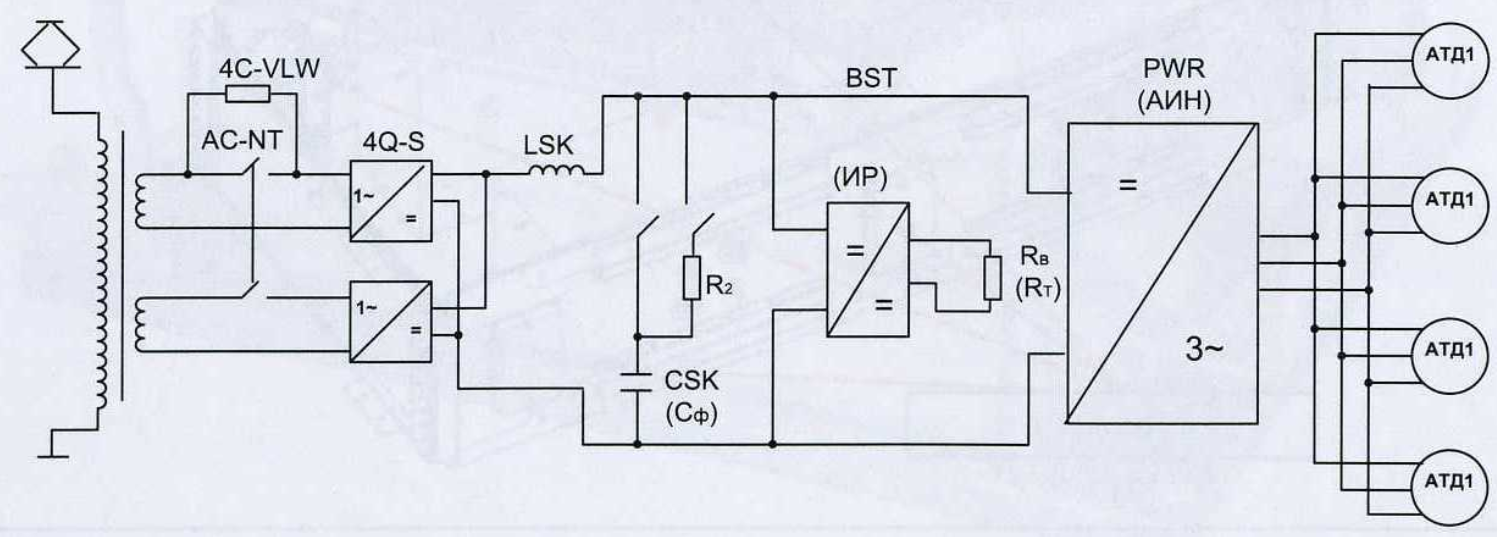
Функциональная схема силовых цепей электропоезда ЭВС2 (кликабельно)
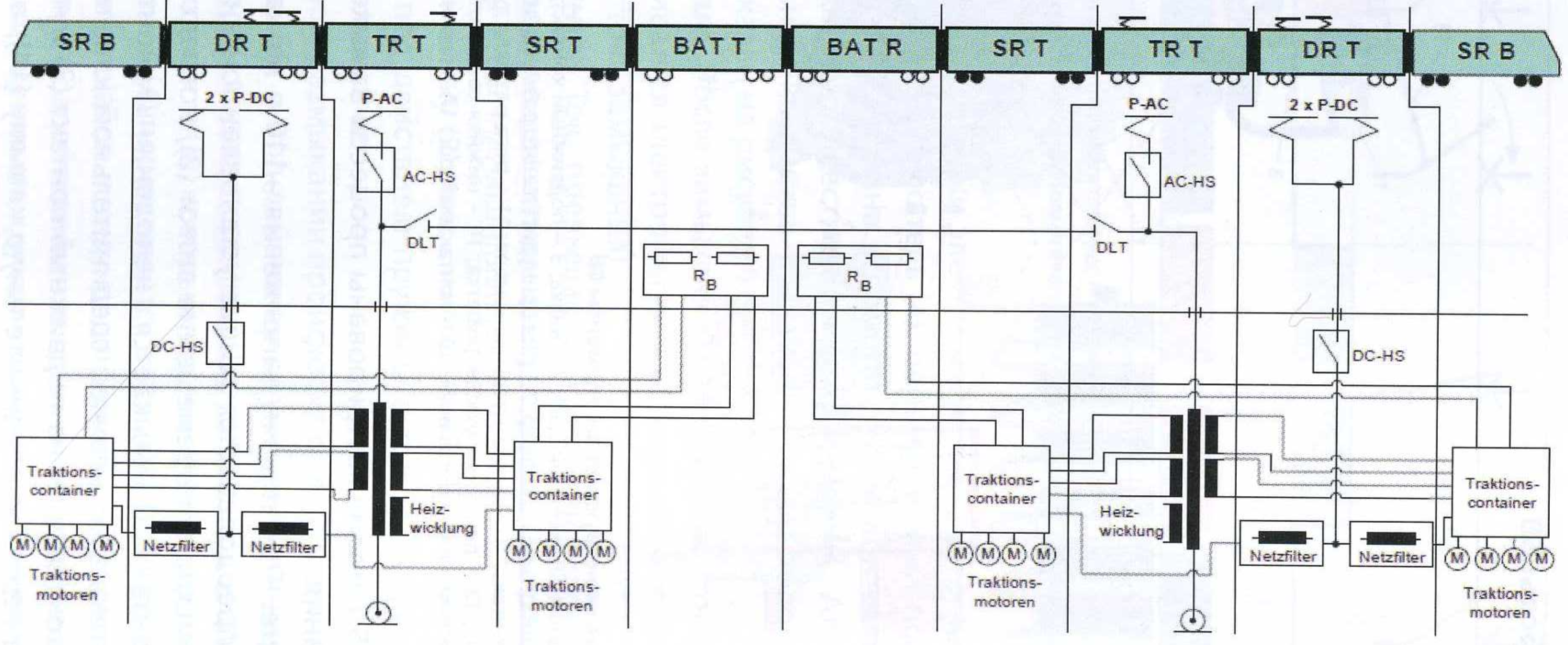
Traktions container — контейнер тягового преобразователя; Netzfilter — сетевой фильтр; Traktions motoren — тяговые двигатели
При работе на переменном токе, напряжение снимается из контактной сети одним из токоприемников переменного тока P-AC, и через главный выключатель AC-HS и крышевой ввод попадает в третий (или восьмой) вагон электропоезда. Токоприемников переменного тока на поезде два — поднимается задний по ходу движения токоприемник, второй выступает в качестве резервного и вступает в дело при повреждении основного токоприемника. Питание на секцию с опущенным токоприемником подается по крышевой высоковольтной шине, через пару разъединителей DLT. Переменное напряжение 25 кВ, 50 Гц, поступает на первичную обмотку тягового трансформатора, понижается им, и от четырех вторичных полуобмоток подается в контейнеры тяговых преобразователей (Traktions container). Там это напряжение выпрямляется четырехквадрантными преобразователями (4QS-преобразователи), подаваясь на вход звена постоянного тока, и далее на автономный инвертор напряжения (АИН) PWR, питающий тяговые двигатели.
Не следует путать 4QS-преобразователь с управляемым выпрямителем. Выпрямитель, в том числе управляемый, всегда является понижающим AC-DC преобразователем, в то время как 4QS-преобразователь, кроме того что может работать как управляемый выпрямитель, является ещё и повышающим AC-DC преобразователем, за счет наличия в его схеме контура короткого замыкания с индуктивным дросселем и специального алгоритма управления ключами. Подробнее о принципе его работы можно почитать, например, тут, так как в задачу данной статьи не входит описание принципов построения силовых преобразователей. Тем не менее, отмечу, что напряжение (действующее) на вторичной полуобмотке тягового трансформатора равно 1550 В, при этом с выхода 4QS-преобразователя снимается напряжение постоянного тока 3 кВ. За счет данного преобразователя, система управления стабилизирует напряжение в звене постоянного тока, вне зависимости от колебаний напряжения в тяговой сети (от 19 до 29 кВ).
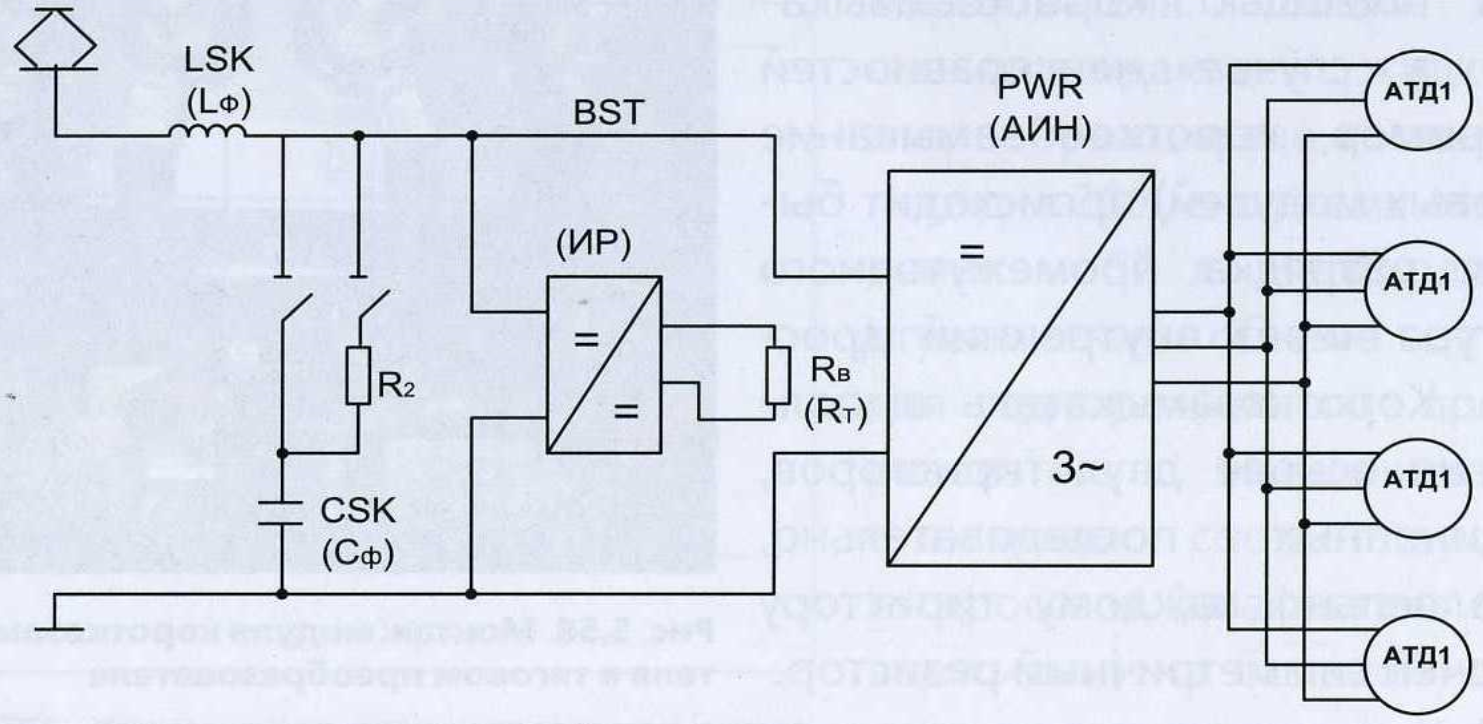
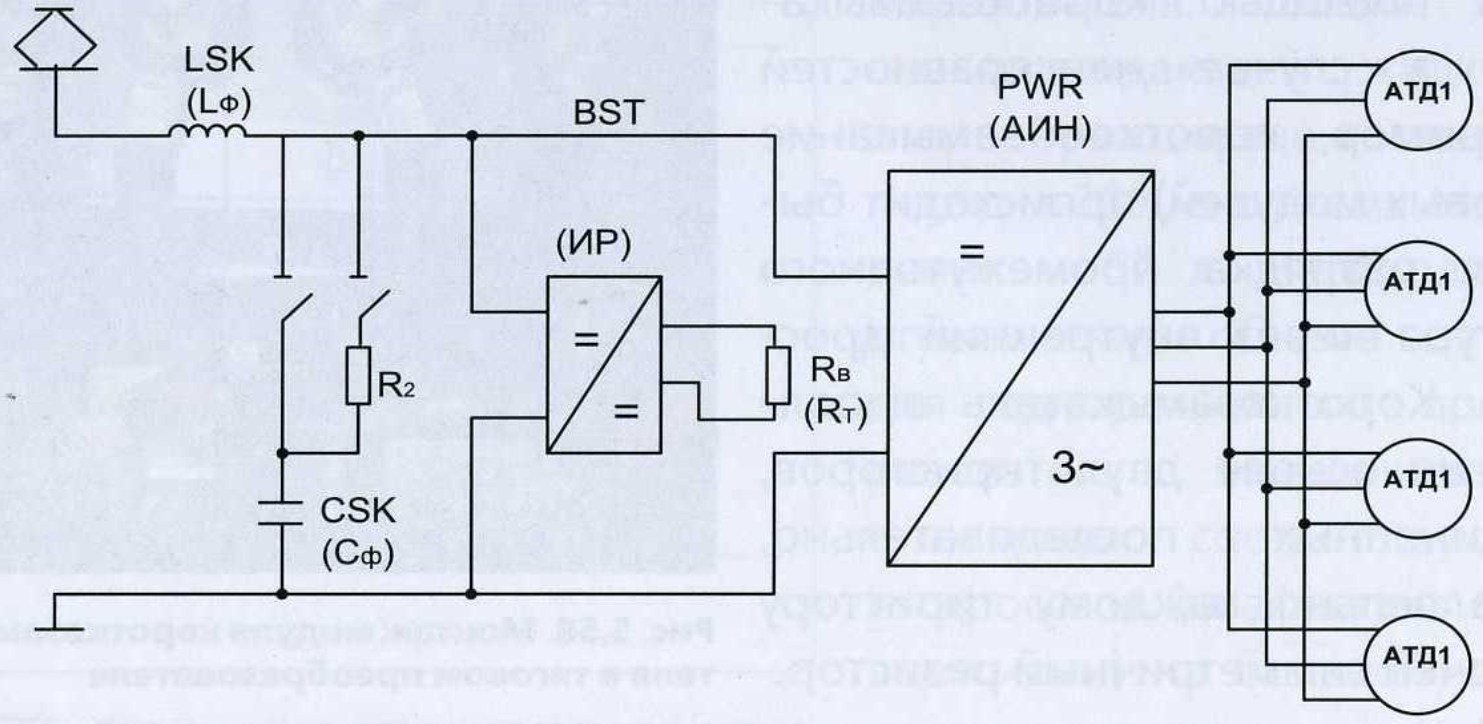
Упрощенная схема силовой цепи при питании переменным током (кликабельно)

Часть схемы со звеном постоянного тока и АИН у ЭВС1 и ЭВС2 совершенно идентична, за исключением того, что при питании от постоянного тока, АИН вынужден довольствоваться тем напряжением постоянного тока, которое приготовила ему тяговая подстанция. С учетом тяги других поездов на участке, рабочие пределы его изменения от 2,2 до 4 кВ.
При работе на постоянном токе, каждая секция поезда питается от своего токоприемника постоянного тока P-DC. Таких токоприемников на поезде четыре, они попарно расположены на втором и девятом вагоне. В нормальной работе поднимается задний по ходу движения токоприемник в каждой пятивагонной секции. Второй токоприемник в паре является резервным.
Упрощенная схема силовой цепи при питании постоянным током (кликабельно)
Почему на постоянном токе поднимают два токоприемника? Потому, что действующее значение напряжения в сети постоянного тока (3 кВ) меньше действующего значения напряжения в сети переменного тока (25 кВ) в 8,3 раза. При одинаковой потребляемой из сети мощности, ток текущий через токоприемник постоянного тока будет выше во столько же раз. По правде несколько не совсем так, нужно еще учитывать реактивую мощность в цепи переменного тока, однако, если использовать один токоприемник, он получится и массивным, и протекание всего тягового тока может вызвать пережог контактного провода в месте токосъема, поэтому тяговый ток уполовинивают, питая каждую секцию от своего токоприемника.
Итак, постоянный ток, через токоприемник P-DC и быстродействующий выключатель DC-HS подается на отпайку плюсового провода звена постоянного тока тягового преобразователя и подается на вход автономного инвертора напряжения (АИН) PWR. АИН преобразует постоянный ток в переменный трехфазный, с изменяющейся частотой и амплитудой напряжения, за счет чего осуществляется регулирование тягового усилия, развиваемого тяговыми электродвигателями (ТЭД).
Рассмотренная схема обеспечивает режим тяги, так и режим электродинамического торможения, которое на «Сапсане» рекуперативно-реостатное.
При возможности выполнять рекуперацию (исправные силовые цепи и ненасыщенная контактная сеть с напряжением на постоянном токе менее 4кВ, на переменном — менее 29 кВ) выполняется рекуперативное торможение. АИН работает как регулируемый трехфазный выпрямитель по схеме Ларионова, преобразуя трехфазное напряжение, вырабатываемое ТЭД в постоянный ток, которое при работе на постоянном токе отдается в сеть, а при работе на переменном — преобразуется в однофазное напряжение 4QS-преобразователем, работающим в режиме инвертора, обеспечивающего компенсацию реактивной мощности, значение коэффициента мощности максимально близким к единице (пресловутый «косинус фи»). Далее, повышенное тяговым трансформатором напряжение, выдается в сеть.
При срыве рекуперации, энергия, преобразованная АИН, перераспределяется на тормозной резистор RB. Для решения этой задачи в звене постоянного тока в силовую цепь включен импульсный регулятор напряжения (ИР), представляющий собой транзисторный понижающий DC-DC преобразователь, основная задача которого — регулирование тока, протекающего через тормозной резистор.
Каждый тяговый преобразователь имеет индивидуальный тормозной резистор, которые собраны в блоки и располагаются под защитным обтекателем с жалюзи на крышах пятого и шестого вагонов.
Таким образом, каждый из четырех моторных вагона электропоезда оснащен одним тяговым преобразователем, обеспечивающим работу четырех тяговых двигателей в режиме тяги и электродинамического торможения. Из сорока осей в поезде, 16 осей оснащены тяговым приводом, общей мощностью 8 МВт в режиме тяги и рекуперации и 3,2 МВт в режиме реостатного торможения (40% мощности за счет ограничения тока через тормозные резисторы).
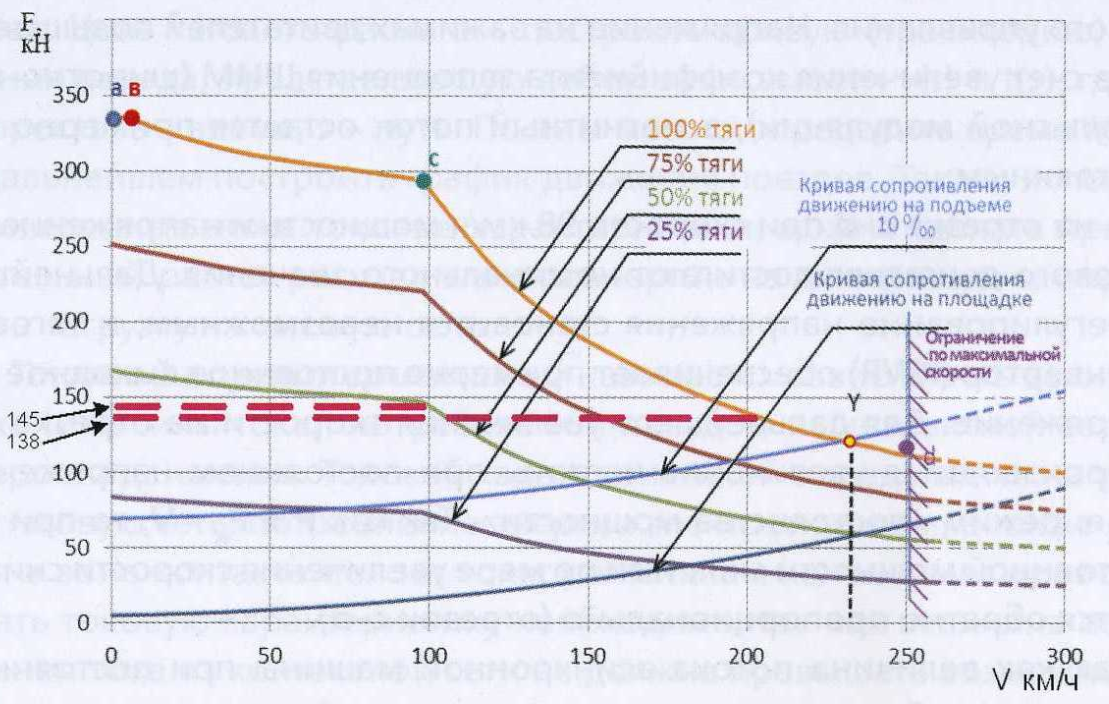
Приведу тяговую характеристику поезда — зависимость силы тяги от скорости (кликабельно)

Из этого графика, в частности, видно, что электропоезд способен разогнаться до скорости свыше 300 км/ч на площадке, а на подъеме в 10 тысячных поддерживать скорость 230 км/ч.
При исправном одном моторном вагоне (25% мощности) поезд на площадке вполне легко пойдет со скоростью 180 км/ч, а на подъем в 10 тысячный будет уверенно ехать со скоростью 80 км/ч.
Все вышесказанное говорит о том, что поезд располагает запасом мощности, и способен на гораздо более высокие эксплуатационные показатели, чем он демонстрирует сейчас.
Ограничение в 250 км/ч введено искусственно в системе управления тягой, из-за отсутствия на наших дорогах инфраструктуры для движения с большими скоростями. После модернизации участка Москва — Санкт-Петербург, однако, «Сапсан» (при отключенной системе АУДиТ — Автоматическое Управление Движением и Торможением, как раз и не дающей разогнаться выше 250) достиг скорости 291 км/ч. Быстрее по нашим железным дорогам пока никто не ездил.
4. Тормозные системы электропоезда
Рассмотрим общие черты тормозов. Электропоезд оснащен несколькими тормозными системами:
- Пневматический тормоз непрямого действия (автоматический тормоз)
- Электропневматический тормоз непрямого действия
- Электродинамический рекуперативно-реостатный тормоз (4 вагона из 10)
- Стояночный тормоз с пружинными энергоаккумуляторами (СПТ)
В штатном режиме использование этих тормозных систем выполняется системой управления. В соответствии с состоянием органом управления на пульте машиниста, задания, формируемое подсистемой АУДиТ — Автоматическое Управление Движением и Торможением, а так же подсистемой автоведения, происходит выбор рабочей тормозной системы и уровень тормозного усилия ей обеспечиваемый.
Управление движением, в том числе и торможением, обеспечивается тремя рукоятками на пульте машиниста. При этом различают несколько режимов регулирования скорости:
- Автоведение — управление поездом без вмешательства машиниста
- Поддержание заданной скорости — машинист задает требуемую скорость задатчиком скорости (рукоятка 1 на рисунке ниже), ограничивая мощность привода в тяговом режиме задатчиком силы тяги (рукоятка 3). Разгон, при полной тяговой мощности автоматически происходит с ускорением не более 0,5 м/с2. Тормоза задействуются автоматически, при превышении текущей скорости над заданной, обеспечивая торможение с ускорением -0,5 м/с2. Таким образом, в этом режиме поезд управляется одной единственной рукояткой задатчика скорости, а переход из тяги в торможение выполняется плавно и без участия машиниста.
- Режим ручного торможения. Машинист задает тормозное ускорение тормозным контроллером под правой рукой (рукоятка 4), система управления поездом поддерживает это ускорение на заданном уровне. При этом режим тяги отключается, и повторное включение тяги, после ручного торможения, возможно только при полном отпуске тормозов и перевода рукоятки задатчика тяги в положение «0» (так называемое квитирование)
Кабина электропоезда «Сапсан» (кликабельно)
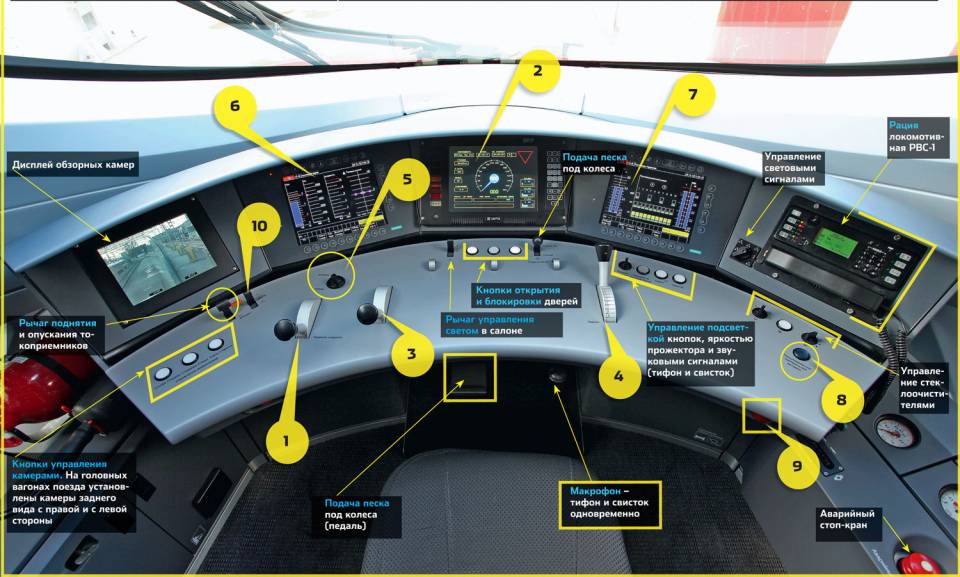
1 — задатчик скорости; 2 — дисплейный модуль устройства безопасности КЛУБ-У; 3 — задатчик силы тяги; 4 — тормозной контроллер (задатчик тормозного ускорения); 5 — реверсивный переключатель; 6 — дисплей интерфейса «человек-машина»; 7 — тормозной дисплей.
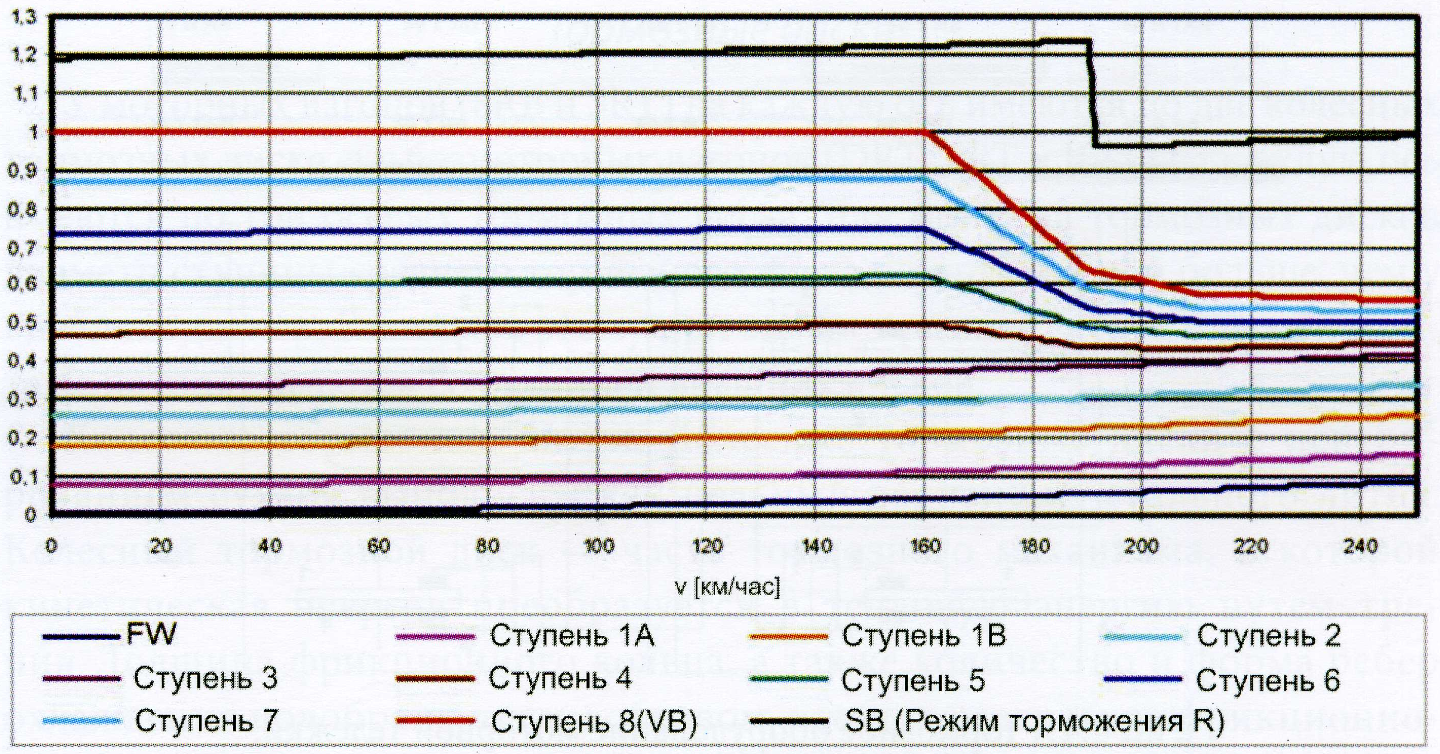
В любом из перечисленных режимов управления, система управления тормозами руководствуется, прежде всего, величиной заданного ускорения, которое, в ручном режиме, в зависимости от положения рукоятки контроллера и скорости поезда определяется по следующим кривым
Кривые заданного тормозного ускорения (кликабельно)
Для обеспечения заданного ускорения приводятся в действие тормоза, причем приоритетным рабочим тормозом является электродинамический рекуперативный тормоз (ЭДТ) на моторных вагонах.
Естественно и логично отдавать приоритет ЭДТ, так как 40% вагонов поезда являются моторными, при этом ЭДТ обеспечивает довольно существенное тормозное усилие. О мощности ЭДТ на «Сапсане» можно судить по его тормозной характеристике
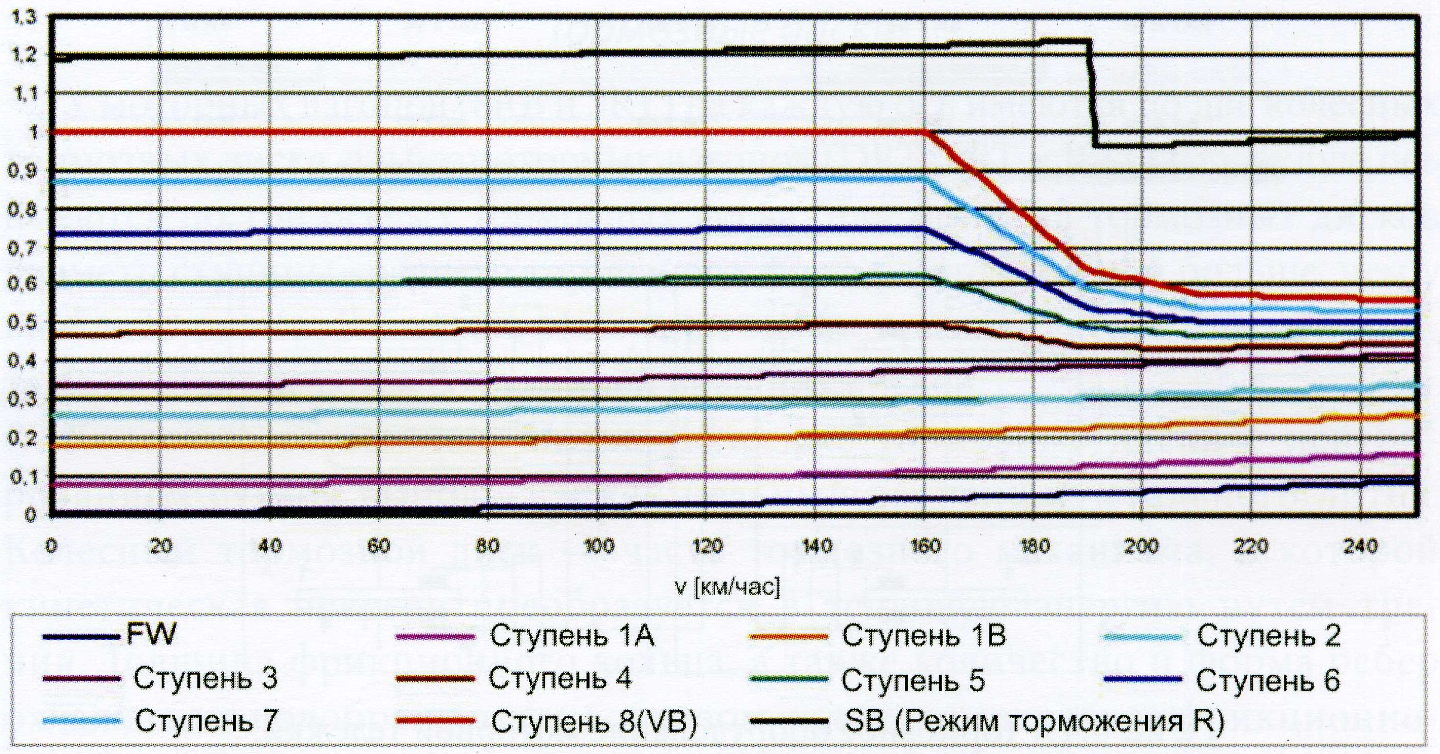
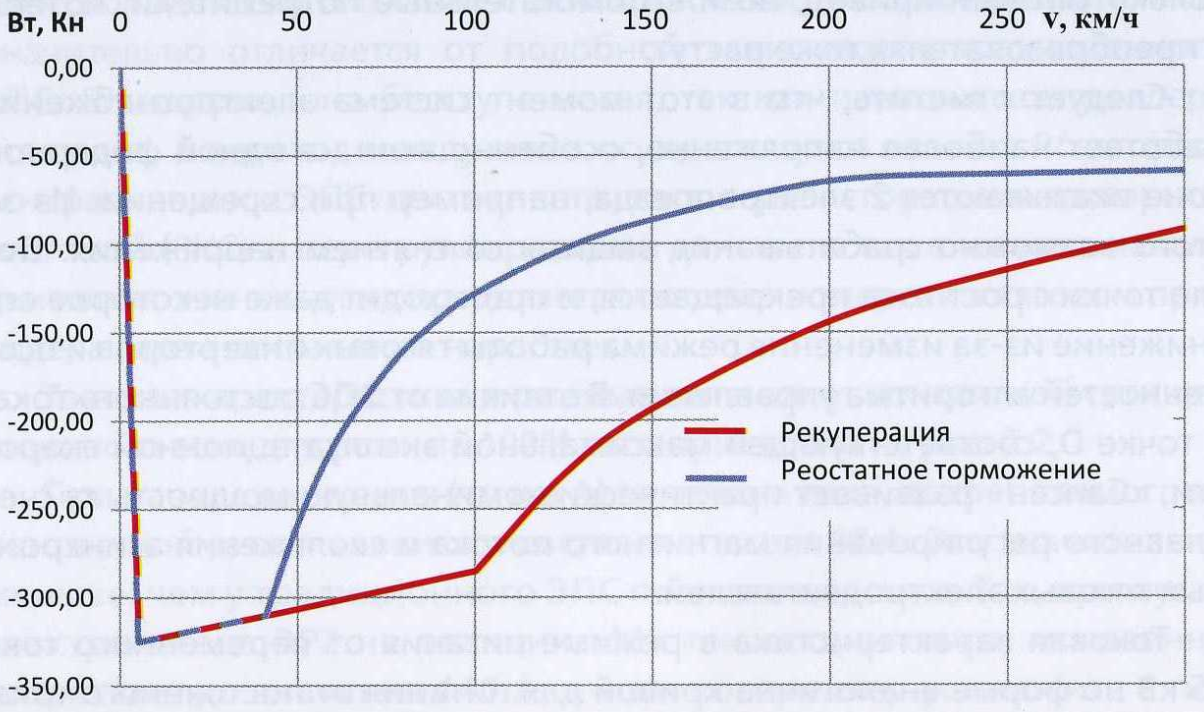
Тормозные характеристики электропоезда в режиме ЭДТ (кликабельно)
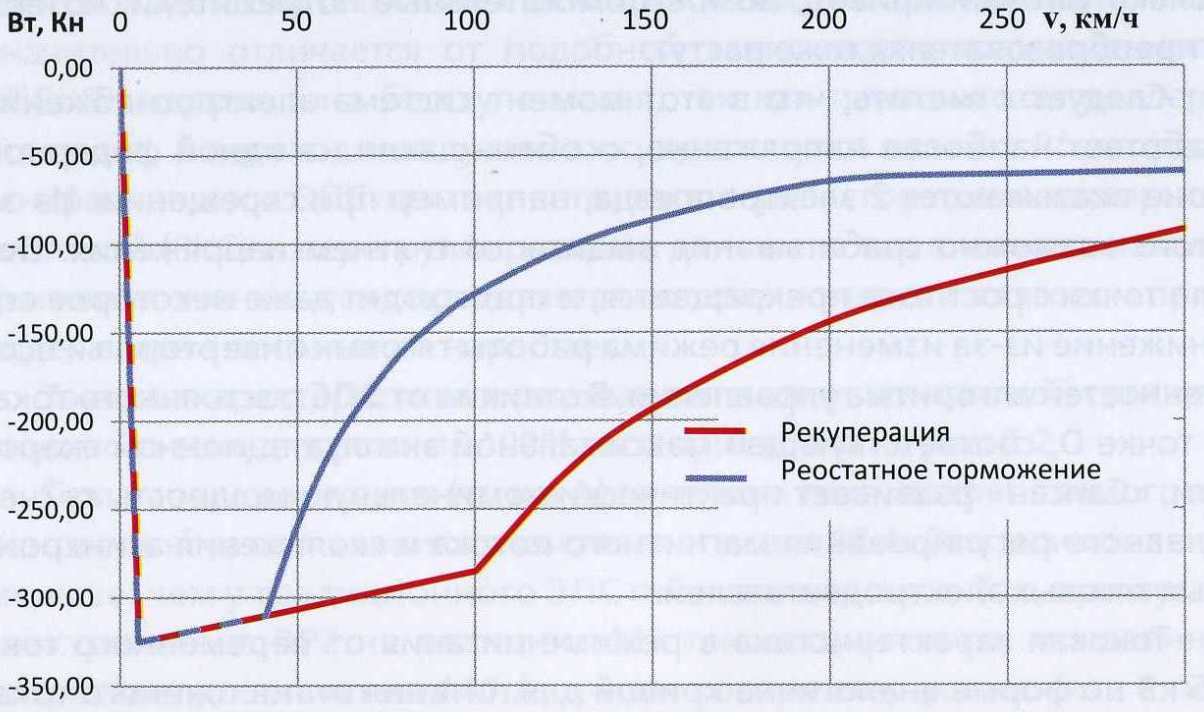
В режиме рекуперативного торможения, на скорости 250 км/ч, ЭДТ обеспечивает поезду тормозное ускорение -0,18 м/с2, при меньших скоростях его эффективность повышается до -0,5 м/с2.
При недостаточной эффективности ЭДТ, приводятся в действие пневматические (ПТ) или электропневматические (ЭПТ) тормоза на прицепных вагонах — моторные продолжают использовать ЭДТ. При этом тормозное усилие регулируется таким образом, чтобы, опять таки, поддерживать заданное ускорение. При превышении ускорения над заданным значением, прежде всего отпускаются пневматические тормоза. Система стремится, таким образом, максимально использовать возможности электрического тормоза.
При скорости ниже 3 км/ч, выполняется замещение электродинамического тормоза пневматическим. При снижении эффективности ЭДТ на каком либо из моторных вагонов, конкретно на этом вагоне выполняется замещение ЭДТ на ПТ/ЭПТ.
5. Особенности конструкции пневматических и электропневматических тормозов
Об этих системах следует поговорить подробнее, даже вне рамок данной статьи. В этой же статье поговорим об общих принципах реализации автоматических тормозов на «Сапсане».
Высокоскоростное движение предъявляет к пневматическим и электропневматическим тормозам обязательное требование — любое торможение с применением ПТ/ЭПТ должно происходить с обязательной разрядкой тормозной магистрали служебным темпом!
Исходя из данного требования, торможение всегда осуществляется путем разрядки тормозной магистрали с последующим срабатыванием на каждом вагоне воздухораспределителя (ВР), набирающего тормозные цилиндры из запасного резервуара (ЗР). Даже если это торможение электропневматическое.
При работе ЭПТ происходит одновременная разрядка тормозной магистрали на всех вагонах, локально, в месте подключения к ней воздухораспределителя, выполняемая электропневматическими вентилями. Этим обеспечивается одновременность их срабатывания, но и только! Воздухораспределитель реагирует только на разрядку тормозной магистрали. Конструкций подобных нашему пассажирскому ЭПТ, где разрядки ТМ практически не происходит, а наполнение тормозных цилиндров ведется из запасного резервуара непосредственно электровоздухораспределителем, с одновременной подпиткой ЗР из ТМ, вы на высокоскоростных поездах не увидите.
При выключении ЭПТ, разрядка тормозной магистрали выполняется с головы поезда, со стороны рабочей кабины, устройством, по своему действию аналогичным крану машиниста, именуемым блок управления тормозной магистралью (БУТМ). Посмотрим на схему тормозов головного вагона
Упрощенная схема тормозов головного моторного вагона (кликабельно)
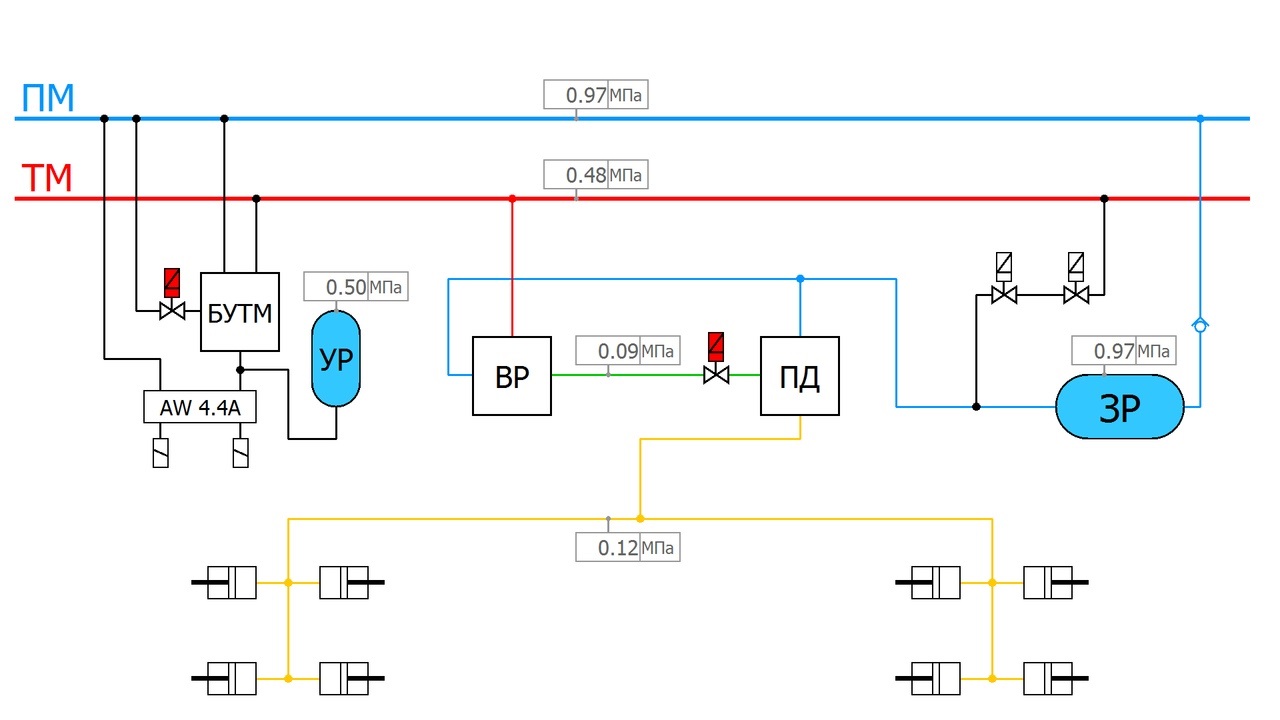
Зарядное давление тормозной магистрали на «Сапсане» равно 0,5 МПа. Система управления, через электропнематические вентили, снижает давление в уравнительном резервуаре (УР) служебным темпом. В след за этим, БУТМ, стремясь поддерживать давление в тормозной магистрали давлению в УР, снижает давление и в ней служебным темпом.
Воздухораспределитель срабатывает на торможение. Но он не наполняет тормозные цилиндры! Он создает в своей тормозной камере давление, равное тому, которое должно установится в тормозных цилиндрах! За наполнение ТЦ отвечает преобразователь давления (ПД), работающий как пневматическое реле. Тормозная камера ВР соединена с рабочей камерой ПД трубопроводом, через запирающий электропневматический вентиль.
При подаче питания на этот вентиль, он перекрывает трубопровод и сбрасывает давление из рабочей камеры ПД, что приводит к отпуску тормозов даже при сработавшем на торможении воздухораспределителе. Питание на этот вентиль подается, если на вагоне работает электрический тормоз. Если электрический тормоз не работает, питание с этого вентиля снимается и происходит наполнение тормозных цилиндров до давления, заданного от ВР.
Замечу также и то, что запасный резервуар, непрерывно, через обратный клапан, отпитывается от питательной магистрали (ПМ), где поддерживается давление от 0,8 до 1 МПа, за счет работы компрессора. Давление в ЗР лежит в этих же пределах, так что пневматический тормоз электропоезда является неистощимым. В отличие от поездов с локомотивной тягой, питательная магистраль проходит через все вагоны электропоезда.
Схема тормозов моторного промежуточного вагона выглядит также, как и на головном, за исключением того что там отсутствует БУТМ. На прицепном вагоне установлено 6 тормозных цилиндров, вместо четырех на моторном, в остальном, его устройство в части тормоза, аналогично устройству моторного промежуточного вагона.
Следует отметить, что воздухораспределитель, обозначаемый страшной аббривеатурой KEdSo-EAE, производства Knorr Bremse, в отличие от ВР 242, принятого у нас, имеет ступенчатый пневматический отпуск, за счет того, что работает на разнице не двух давления (в ТМ и ЗР), а трех давлений: в тормозной магистрали (ТМ), рабочей камере (РК) и тормозной камере (ТК). В РК сохраняется давление равное зарядному, что позволяет выполнять отпуск ступенями.
Эта особенность идет от того, что на европейских дорогах ВР (серии KE) унифицированы между грузовыми и пассажирскими поездами, да и грузовые поезда короткие, так что для пневматического торможения в них нет нужды в монстрах типа ВР 483.
Второй нюанс — БУТМ, который является по сути не просто тормозным краном с дистанционным управлением, а управляется опосредованно, через систему управления поездом, которая сама, без участия машиниста решает, когда и насколько разрядить тормозную магистраль, чтобы обеспечить требуемое ускорение (заданное машинистом, подсистемой АУДиТ или системой автоведения), а так и когда отпустить тормоза, тоже принимает решение электроника.
А что делать, если «эта ваша электроника» выйдет из строя? Во-первых, есть режим экстренного торможения (ЭТ). Реализуется он безо всякой электроники — машинист, переведя контроллер в положение ЭТ, механическим клапаном открывает огромную дыру в тормозной магистрали. Справа, на тумбе, установлен второй клапан, выполняющий ту же функцию — нажатие на ударную кнопку открывает ТМ в атмосферу. Естественно, существует и ряд электрических цепей, образующих так называемую ПЭТ — Петлю Экстренного Торможения. Но её функция вторична, поезд может быть остановлен и без неё.
Вторым способом, уже после ЭТ и откачки поезда, если надо довести поезд до депо без вызова вспомогательного локомотива, является использование крана резервного управления. Он установлен справа от машиниста на боковой тумбе и имеет три положения: О — отпуск, П — перекрыша, Т — торможение. Этот кран позволяет вручную, пневмо-механически регулировать давление в ТМ, выполняя торможение и отпуск тормозов.
Заключение
Думаю, вышел неплохой обзор, думаю, статья будет интересна и полезна для любителей железной дороги. Пока я работал над ней, понял, что одной статьи для «Сапсана» будет мало. Поэтому, первая статья вышла пилотной, дающей общее представление об этом поезде, являющем собой сплав великолепной точной механики, современной силовой электроники и информационных технологий. Поэтому, спасибо за внимание и…
На закуску — предлагаю вашему вниманию видеоэкскурсию на тренажер «Сапсана», руководителем разработки которого является ваш покорный слуга
Продолжение следует...
