Здравствуй, уважаемый Хабр.
С недавнего времени я стал заниматься робототехникой, а именно персональной. Данное направление многие, и я в том числе, считают довольно перспективным. Как говорил Дмитрий Гришин, персональная робототехника вполне может стать тем самым Next Big Thing, встав в один ряд с компьютерами, Интернетом, WWW, соц. сетями и мобильными приложениями.
Я фанат роботов и произведений научной фантастики с ними связанной, и как это обычно бывает, все началось с проекта для себя — создания своего робота, дабы на нем тестировать алгоритмы ИИ, и тому подобные вещи. Так как я больше предпочитаю работать с кодом, чем железом, то я думал купить готового робота и работать с ним, но, к сожалению, подходящего на рынке не обнаружил.
Из тех что были, внимание привлекли больше всего Qbo от Thecorpora и PR2 от Willow Garage. На мой взгляд, это наиболее соответствующие концепции домашнего робота проекты. Но платить под 4000 € (Qbo) за робота я не собирался, поэтому пришлось создавать его самому.

Скажу сразу, с электроникой я был на очень вы, и потому старался найти людей, которые смогут помочь с этим. Знакомые электронщики помогали, по большей части, только советом, так как были заняты своими проектами. Покопавшись немного я понял, что не все так страшно, как казалось на первый взгляд. Да и вообще, в процессе изучения и разработки проекта я пришел к тому же выводу, что и получил при изучении программирования: проще что-то изучить самому и использовать полученные знания, чем обращаться к человеку, который этими знаниями владеет (возможно, это действительно так только в моем случае, но это отлично сокращает временные затраты на поиск людей и увеличивает степень контроля и компетентности в проекте).
Собственно, началось все с азов: Arduino и колесная платформа.
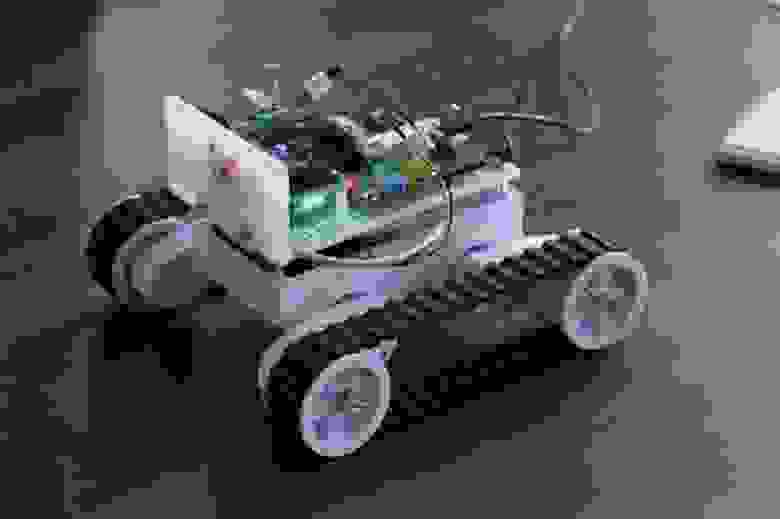
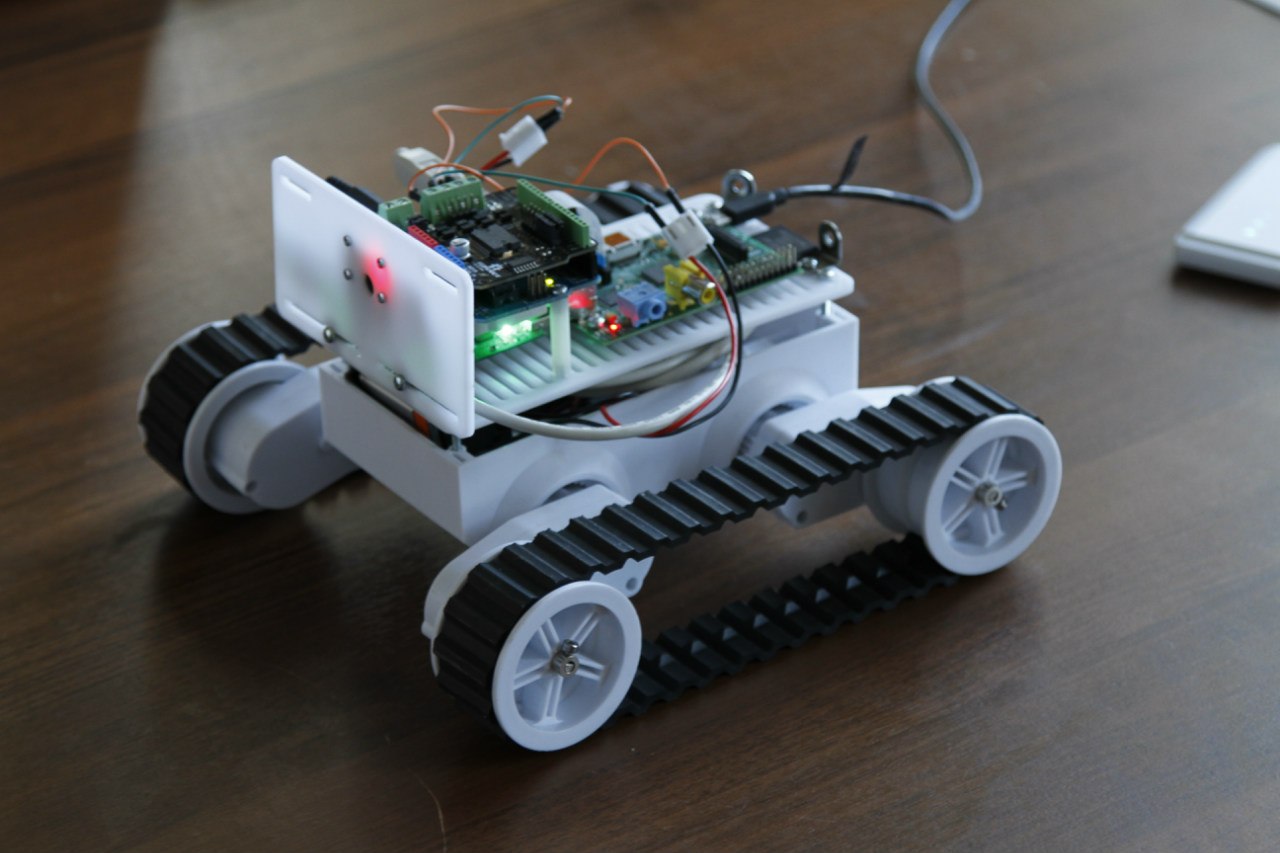
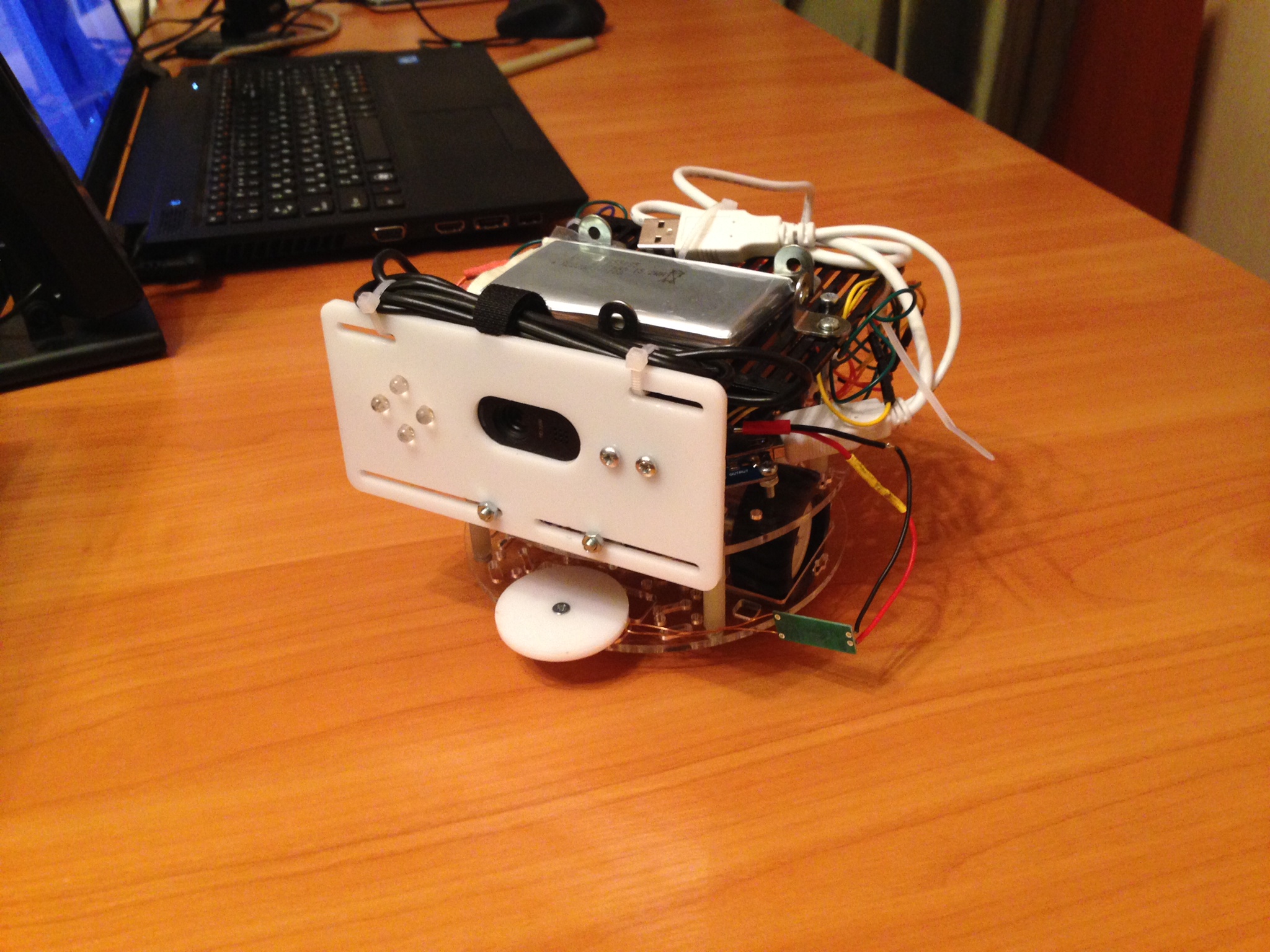
Это было сделано достаточно быстро, и мне нужен был следующий challenge. Я решил увеличить способности робота, и подключил, своего рода, “мозги высокого уровня”, а именно одноплатный ПК (взял с наибольшим на тот момент сообществом — Raspberry Pi). Добавив к нему готовое шасси (дабы не мучиться с креплениями моторов и энкодеров и тому подобными вещами) и вырезав необходимые детали на лазерном станке из оргстекла, я получил простого робота телеприсутствия.
Настала пора заняться распознаванием голоса (а кто не хочет иметь своего Jarvis’а дома :)). Остановил выбор я на Julius.
С английской языковой моделью он работал превосходно из коробки, но, как оказалось, довольно сложно сделать приемлемую языковую модель русского языка, поэтому я перешел на Google Speech API. Sox и скрипт на питоне в несколько строк кода позволили получить желаемый функционал.
Далее встал вопрос автономного питания. Я не хотел бегать за роботом и заряжать его когда нужно. Он должен сам подъезжать к док-станции и заряжаться когда нужно. Я остановился на Li-Po Rider’e Pro — это дало возможность заряжать аккумулятор и одновременно питать робота.
На этом этапе закончилась разработка робота для себя, и началась разработка концепции робота, как продукта.
В разговоре с подругой у меня случайно всплыла тема о роботе, и она заметила, что было бы неплохо, если бы к нему можно было подключиться откуда угодно и посмотреть, что происходит дома (конкретно в её случае, выключен ли утюг).
Что дало пищу для размышлений и импульс для проведения небольшого маркетингового исследования. Опросив несколько десятков своих знакомых и не очень, я получил выборку из 5 пунктов, которые и составили первичный набор характеристик для домашнего робота MARCO:
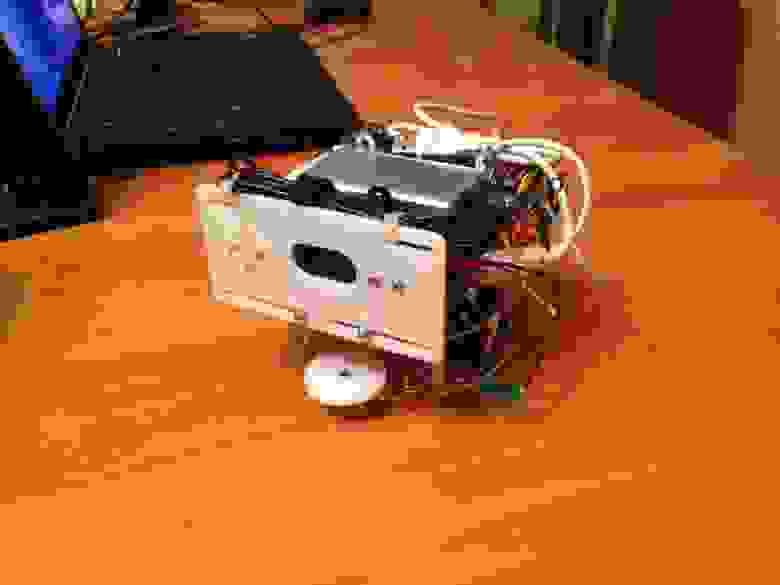
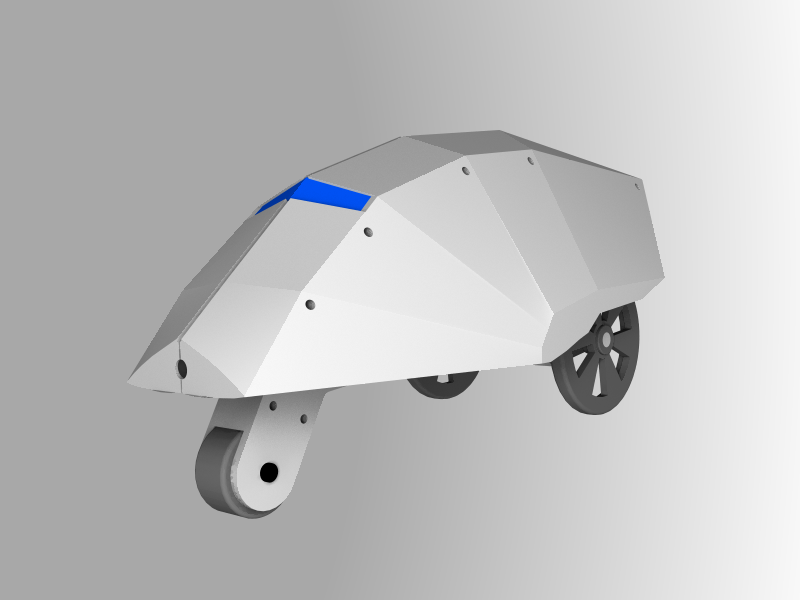
На данный момент ведется работа над доработкой прототипа, окончательным дизайном и форм-фактором робота.
Я верю в то, что роботы станут полноценной частью нашей жизни, как смартфоны, кофеварки, холодильники, компьютеры и тому подобные вещи, но не думаю, что это произойдет в ближайшую пару лет. Но интеграция в современную жизнь начнется именно с таких роботов, как MARCO — простых, дешевых и ежедневно облегчающих какие-либо стороны жизни современного человека.
С недавнего времени я стал заниматься робототехникой, а именно персональной. Данное направление многие, и я в том числе, считают довольно перспективным. Как говорил Дмитрий Гришин, персональная робототехника вполне может стать тем самым Next Big Thing, встав в один ряд с компьютерами, Интернетом, WWW, соц. сетями и мобильными приложениями.
Я фанат роботов и произведений научной фантастики с ними связанной, и как это обычно бывает, все началось с проекта для себя — создания своего робота, дабы на нем тестировать алгоритмы ИИ, и тому подобные вещи. Так как я больше предпочитаю работать с кодом, чем железом, то я думал купить готового робота и работать с ним, но, к сожалению, подходящего на рынке не обнаружил.
Из тех что были, внимание привлекли больше всего Qbo от Thecorpora и PR2 от Willow Garage. На мой взгляд, это наиболее соответствующие концепции домашнего робота проекты. Но платить под 4000 € (Qbo) за робота я не собирался, поэтому пришлось создавать его самому.
История
Скажу сразу, с электроникой я был на очень вы, и потому старался найти людей, которые смогут помочь с этим. Знакомые электронщики помогали, по большей части, только советом, так как были заняты своими проектами. Покопавшись немного я понял, что не все так страшно, как казалось на первый взгляд. Да и вообще, в процессе изучения и разработки проекта я пришел к тому же выводу, что и получил при изучении программирования: проще что-то изучить самому и использовать полученные знания, чем обращаться к человеку, который этими знаниями владеет (возможно, это действительно так только в моем случае, но это отлично сокращает временные затраты на поиск людей и увеличивает степень контроля и компетентности в проекте).
Собственно, началось все с азов: Arduino и колесная платформа.
Это было сделано достаточно быстро, и мне нужен был следующий challenge. Я решил увеличить способности робота, и подключил, своего рода, “мозги высокого уровня”, а именно одноплатный ПК (взял с наибольшим на тот момент сообществом — Raspberry Pi). Добавив к нему готовое шасси (дабы не мучиться с креплениями моторов и энкодеров и тому подобными вещами) и вырезав необходимые детали на лазерном станке из оргстекла, я получил простого робота телеприсутствия.
Настала пора заняться распознаванием голоса (а кто не хочет иметь своего Jarvis’а дома :)). Остановил выбор я на Julius.
С английской языковой моделью он работал превосходно из коробки, но, как оказалось, довольно сложно сделать приемлемую языковую модель русского языка, поэтому я перешел на Google Speech API. Sox и скрипт на питоне в несколько строк кода позволили получить желаемый функционал.
Далее встал вопрос автономного питания. Я не хотел бегать за роботом и заряжать его когда нужно. Он должен сам подъезжать к док-станции и заряжаться когда нужно. Я остановился на Li-Po Rider’e Pro — это дало возможность заряжать аккумулятор и одновременно питать робота.
На этом этапе закончилась разработка робота для себя, и началась разработка концепции робота, как продукта.
Продукт
В разговоре с подругой у меня случайно всплыла тема о роботе, и она заметила, что было бы неплохо, если бы к нему можно было подключиться откуда угодно и посмотреть, что происходит дома (конкретно в её случае, выключен ли утюг).
Что дало пищу для размышлений и импульс для проведения небольшого маркетингового исследования. Опросив несколько десятков своих знакомых и не очень, я получил выборку из 5 пунктов, которые и составили первичный набор характеристик для домашнего робота MARCO:
- Автономность
Смартфоны, планшеты, ноутбуки, мобильные телефоны. Ещё и робота заряжать? Нет уж, увольте. Робот должен быть автономным и сам заряжаться, когда нужно. - Датчики безопасности
Многие хотят функционал умного дома, но не все готовы за него платить. Кто-то не желает переделывать новый ремонт в квартире. Кто-то снимает жилье, и владелец не позволяет что-либо делать с квартирой. Таким образом, робот может стать, своего рода, “неинвазивным” решением домашней автоматики. Датчики влажности, температуры, дыма, пропана могут по требованию передать информацию о состоянии вашего дома в любой момент времени, а в случае возникновения чрезвычайной ситуации робот может немедленно сообщит об этом. - Удаленное управление
Странно на мой взгляд, но как оказалось, это был наиболее востребованный функционал при опросе. С одной стороны кому-то это было бы интересно с точки зрения возможности покрасоваться перед друзьями (управлять домашним роботом из бара по айфону), для кого-то была бы интересна возможность постоянного наблюдения за квартирой, детьми, дачей и т.п. Оказалось, “дилемма утюга” (возвращаться ли домой и проверять выключен ли утюг или нет) достаточно актуальна среди городских жителей. - Голосовое управление
Довольно мало людей заинтересовались данным функционалом, но я решил её оставить. - Построение карты помещения
Многие идеи прикладных программ упираются так или иначе в систему навигации и наличие плана помещения, в котором находится робот. К тому же, достаточно много людей при опросе захотели знать и визуально наблюдать, где в квартире находится робот.
На данный момент ведется работа над доработкой прототипа, окончательным дизайном и форм-фактором робота.
Я верю в то, что роботы станут полноценной частью нашей жизни, как смартфоны, кофеварки, холодильники, компьютеры и тому подобные вещи, но не думаю, что это произойдет в ближайшую пару лет. Но интеграция в современную жизнь начнется именно с таких роботов, как MARCO — простых, дешевых и ежедневно облегчающих какие-либо стороны жизни современного человека.
