Лаборатория робототехники Сбербанка и российское ROS-сообщество при поддержке Intel приглашают на очередной, третий MeetUp по Robot Operating System, который состоится в субботу, 18 апреля. И пусть по всем очевидным причинам мероприятие на этот раз пройдет в онлайн формате, настроя это не испортит. Тем более, что призами за лучшие доклады станут продукты Intel для робототехников.

Russian ROS Meetup 2020 — это точка сборки российского ROS-сообщества, возможность для разработчиков ROS и робототехников всех уровней, от новичков до экспертов, посвятить выходные практическому обучению и общению с единомышленниками. Инженеры поделятся реальным опытом использования ROS в исследовательских и коммерческих проектах.
Принять участие в качестве слушателя можно, заполнив заявку на странице мероприятия в Timepad. На Meetup мы приготовили призы для спикеров с лучшими докладами.
Архитектура использования сенсоров.
Участие в мероприятии бесплатное.
Организатор — Лаборатория робототехники Сбербанка.
Партнёр — компания Intel.
Зарегистрируйтесь как слушатель на Meetup тут. До встречи на ROS MeetUp-2020!

Russian ROS Meetup 2020 — это точка сборки российского ROS-сообщества, возможность для разработчиков ROS и робототехников всех уровней, от новичков до экспертов, посвятить выходные практическому обучению и общению с единомышленниками. Инженеры поделятся реальным опытом использования ROS в исследовательских и коммерческих проектах.
Примерный перечень выступлений и дискуссий
- Вводное слово — Альберт Ефимов, руководитель Центра Робототехники Сбербанка
- Обзор, какие компании используют ROS — Алексей Бурков
- Как собрать мобильного робота меньше чем за 20 тысяч рублей — Кабаков Анатолий
- Google Blockly + ROS — Щербов Роман
- ESP32 Rosserial driver или как на ROS сделать климатическую систему — Кузин Никита
- Проект SweetieBot: компактный шагающий робот под управлением ROS — Гончаров Олег
- GPGPU for the rest of us: используем OpenGL ES в ROS — Рогачевский Алексей
- NVIDIA Isaac SDK. Обзорная экскурсия — Слепичев Дмитрий
- Stingray: разработка высокоуровневой платформы для АНПА на основе ROS — Ахтямов Тимур
- Интеграция ML фреймворков с ROS — Плотников Владислав
- Где кончается ROS и начинается реальное время — Романов Алексей
- Физические принципы depth зрения роботов на примере Intel RealSense — Миро Млейнек
- Дискуссия на тему: «Как развивать ROS-сообщество в России?»
Принять участие в качестве слушателя можно, заполнив заявку на странице мероприятия в Timepad. На Meetup мы приготовили призы для спикеров с лучшими докладами.
- 1 место — Intel NUC 8i7INH. Высокая производительность при низком энергопотреблении делает этот компьютер лучшим выбором для робототехнических алгоритмов.
- 2 место — Intel Realsense D435I. Изображение глубины с этой камеры позволяет роботам успешно избегать препятствия
- 3 место — Intel Realsense T265. Высокая точность визуальной одометрии позволяет локализовывать робота в пространстве.
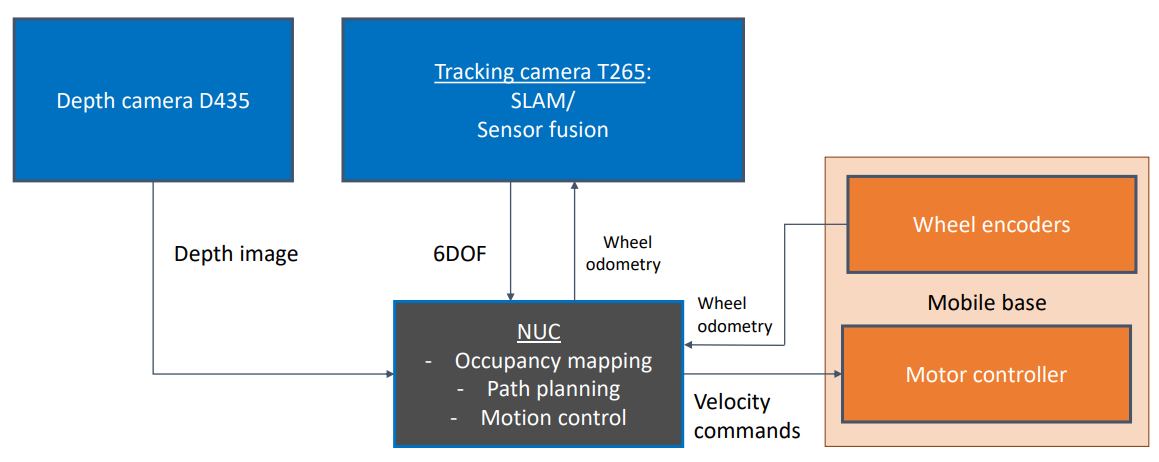
Архитектура использования сенсоров.

Участие в мероприятии бесплатное.
Организатор — Лаборатория робототехники Сбербанка.
Партнёр — компания Intel.
Зарегистрируйтесь как слушатель на Meetup тут. До встречи на ROS MeetUp-2020!
