Comments 9
Ближайший конкурент - DFRobot Romeo. Стоит чуть дороже (хотя, можно поискать). Но есть гребенки под шилды.

DFRobot что-то в последнее время совсем не радует. Библиотеки недопиливает (показателен пример с тупящей DFPlayer), в описаниях одни ошибки. Во многих библиотеках example'ы банально без правки не компилируются, хотя кажется чего уж проще… Видать не справляются с рынком на который замахнулись.
SeeedStudio немного лучше, но недалеко ушли. BMP085, например, захардкожено работает только с Wire. А у Arduino Due есть ещё Wire1. Что помешало сделать чуть гибче (чтобы указатель на синглетон аргументом конструктора Barometer передавался)? Непонятно.
SeeedStudio немного лучше, но недалеко ушли. BMP085, например, захардкожено работает только с Wire. А у Arduino Due есть ещё Wire1. Что помешало сделать чуть гибче (чтобы указатель на синглетон аргументом конструктора Barometer передавался)? Непонятно.
Очень круто!
Объясните кто-нибудь пожалуйста, зачем по схеме между контроллером и l298 нужны инверторы?
Вопрос снят.
Это такой хитрый способ использовать L298 с коллекторным двигателем, чтобы управлять его направлением.
В L298 два полных H-моста. H-мост — это такая штука с двумя выводами, двумя входами и четырьмя состояниями:
В L298 два полных H-моста. H-мост — это такая штука с двумя выводами, двумя входами и четырьмя состояниями:
0 0 - -
0 1 - +
1 0 + -
1 1 + +
Sign up to leave a comment.
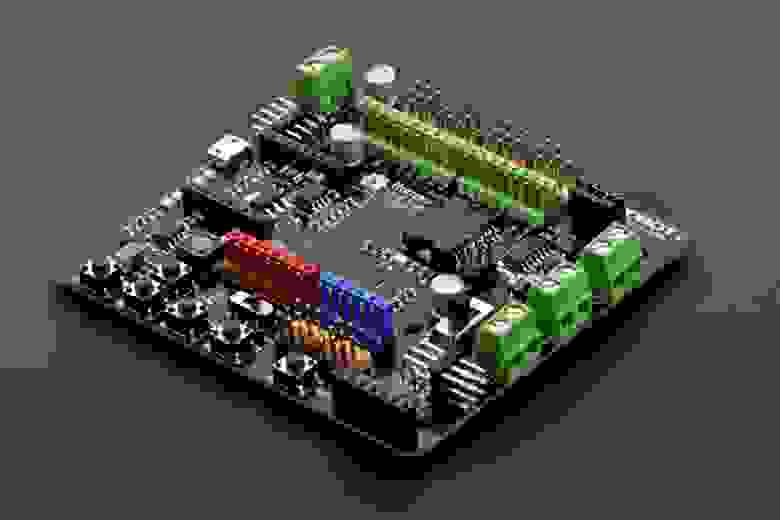
Обзор робототехнической платформы Strela или простой bluetooth-бот своими руками