Поиск, собеседование, тестовое задание, отбор, приём на работу, адаптация — путь тяжёлый и понятный каждому из нас — и работодателю и сотруднику.
Новичок не обладает необходимыми специализированными компетенциями. Даже опытному специалисту приходится перестраиваться. На руководителя давят вопросы, какие задачи поставить новому сотруднику на старте и какое время на них отвести? Обеспечив при этом заинтересованность, вовлечённость, драйв и интеграцию. Но не рисковать критичными бизнес-задачами.
Для этого мы запускаем эстафетные внутренние проекты. Они состоят из независимых коротких этапов. Результаты таких работ служат фундаментом для последующих разработок и позволяют новичку показать себя, влиться в коллектив с интересной задачей и без риска завалить важный проект. Здесь и наработка опыта, и знакомство с коллегами, и возможность показать себя с лучшей стороны, когда нет жёстких ограничений со стороны legacy.
В качестве примера такой эстафетной разработки стала тема ротационного экрана на основе стробоскопического эффекта с возможностью вывода на него произвольного пользовательского динамического изображения, сделанного на экране телефона.Прототипы можно найти здесь.
Работы выполнялись последовательно несколькими сотрудниками и будут продолжены новыми на время их онбординга (от двух недель до месяца в зависимости от способностей и уровня компетенций)..
Этапы были следующими:
a) продумать конструкцию (изучив имеющиеся образцы, описание аналогов, проявив творческую инициативу);
b) разработать принципиальную электрическую схему, развести ее на плате;
c) разработать протокол для передачи изображения с телефона на девайс;
d) обеспечить управление со смартфона через Bluetooth LE.
Стартовым вариантом предполагалось использовать что-то очень компактное типа трехлепесткового спиннера, который при ручном вращении начинал показывать надписи. В одном лепестке располагался BLE-модуль, во втором – десять RGB-светодиодов, в третьем оптический датчик, в центре — аккумулятор. Была составлена принципиальная электрическая схема и проведены первые эксперименты. Стало ясно, что уровень качества картинки очень низкий, разрешение маленькое, игровой эффект непродолжительный, возможности скромные. Да и спиннеры ушли в прошлое так же быстро, как появились. Было решено поднять планку и разработать поворотный стробоскопический экран. Его как минимум можно использовать в практических целях на выставках и конференциях и в ближайшее время интерес к таким решениям не пропадёт.
По части конструкции основных вопросов было два: как располагать светодиоды (в вертикальной плоскости, как на примере выше или в горизонтальной) и как запитать вращающуюся плату со светодиодами.
В образовательных целях светодиоды были расположены только в горизонтальной плоскости. Что касается питания платы, то стоял важный выбор: либо мы берем коллекторный двигатель громоздкий, шумный, но дешевый, либо используем более изящное решение с бесконтактной передачей питания при помощи двух катушек – одна на двигателе, другая на плате. Решение, конечно, изящное, но более дорогое и долгое, т.к. катушки нужно было сначала рассчитать, а потом намотать (желательно не на коленке).
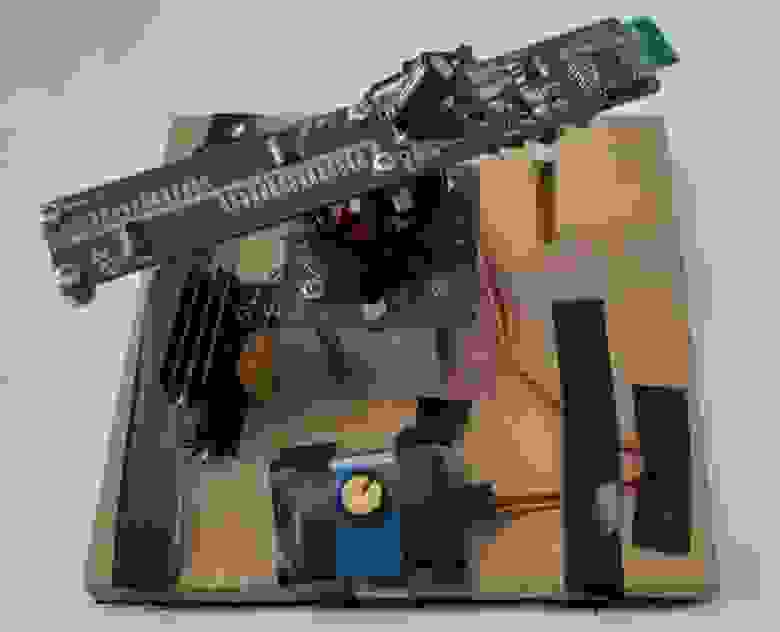
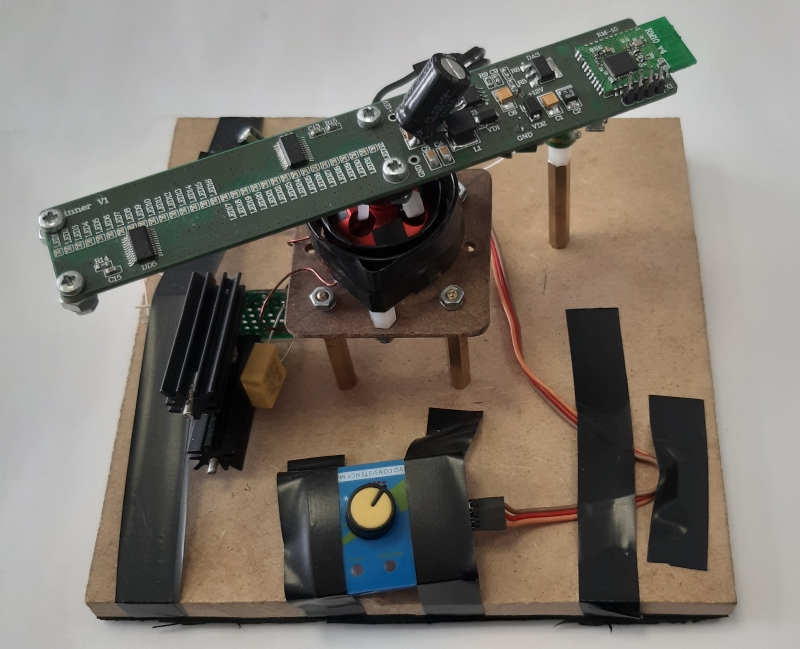
Так выглядит получившийся прототип
Специфика продукции массового производства такова, что значение имеет каждый лишний цент в себестоимости. Успех может определяться стоимостью горстки пассивки. Поэтому часто приходится выбирать менее эффективный, но более дешевый вариант, чтобы производитель мог сохранять коммерческую конкурентоспособность. Поэтому, представив, что ротационный экран будет запущен в массовое производство, разработчик выбрал коллекторный двигатель.
Получившийся прототип при запуске задорно искрил, шумел и сотрясал стол. Конструкция, обеспечившая устойчивость получилась настолько тяжелой и габаритной, что доводить её до серийного прототипа не имело смысла. Порадовавшись за промежуточный успех, приняли решение заменить двигатель на вращающийся трансформатор с воздушным зазором. Еще одной причиной стала невозможность питать двигатель от USB-порта компьютера.
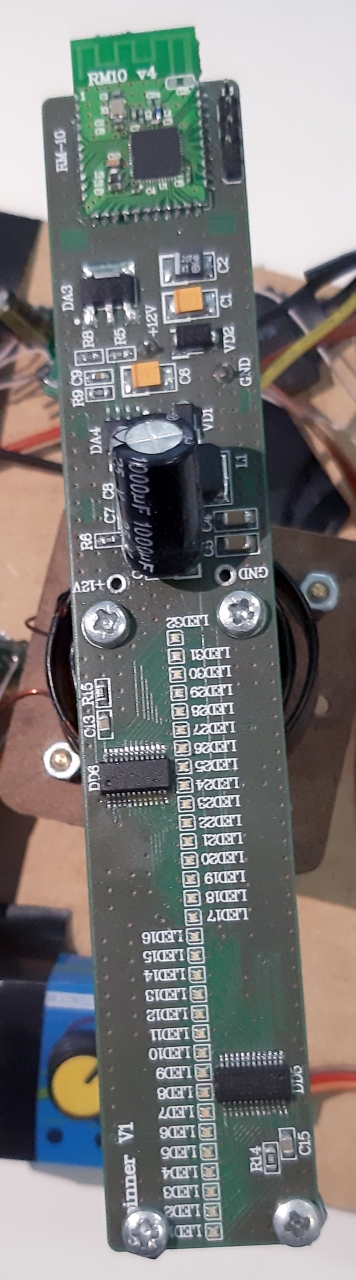
Основой платы со светодиодами стал наш модуль RM10 и шесть светодиодных драйверов MBI5030.
Драйверы имеют 16 каналов с возможностью независимо управлять каждым. Таким образом, 6 таких драйверов и 32 RGB-светодиода суммарно имеют возможность показывать 16 млн. цветов.
Для синхронизации и стабилизации выводимого изображения было использовано два магниторезистивных датчика Холла MRSS23E.
План был прост – датчик дает прерывание на каждый оборот платы, по такту между двумя проходами определяется положение светодиодов и рассчитывается их азимут и свечение в развёртке 360 градусов.
Но что-то пошло не так – вне зависимости от скорости вращения платы датчик выдавал хаотично то одно, то два прерывания за проход. Таким образом изображение получалось размазанным и складывалось внутрь себя.
Замена датчиков ситуацию не поменяла, поэтому датчик Холла был заменен на фоторезистор.
У кого есть мысли, почему магниторезистивный датчик мог так себя повести, поделитесь в комментариях.
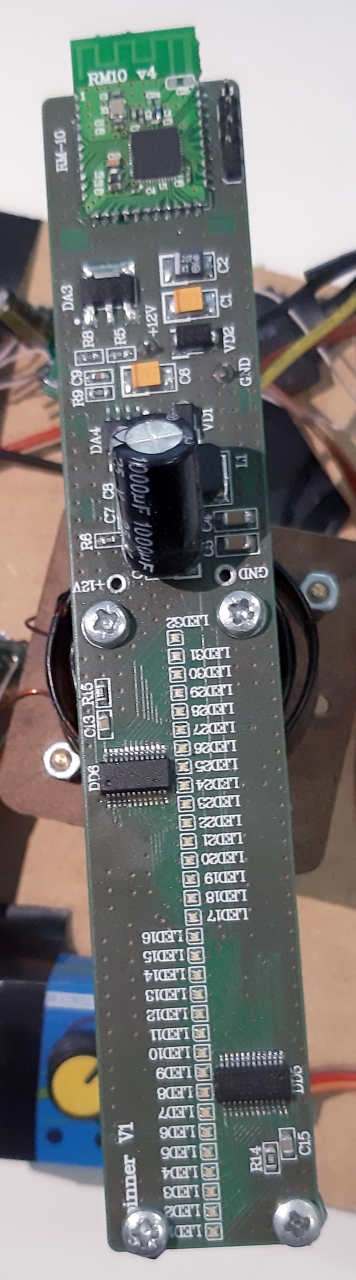
Верхняя сторона платы
С оптическим датчиком изображение получается четкое, но стабилизируется около 30 секунд. Происходит это по комплексу причин, одна из которых – дискретность таймера. Это 4 млн тиков в секунду, делятся на 360 градусов с остатком, который и вносит искажение в выдаваемое изображение.
В китайских стробоскопических часах изображение устанавливается за пару секунд ценой того, что небольшой сегмент круга просто не отображается: на круговом изображении пустое место, на тексте незаметно, но картинка получается неполной.
Однако проблемы не закончились. Микроконтроллер nRF52832 не может обеспечить необходимую скорость передачи данных для возможного количества оттенков (ок. 16 МГц) – экран выдает 1 кадр в секунду, для человеческого глаза этого мало. Очевидно, нужно разместить на плате отдельный микроконтроллер для управления изображением, а пока принято решение заменить MBI5030 на MBI5039. Это всего 7 цветов, включая белый, но этого достаточно для отработки программной части.
Ну и немаловажное, ради чего и была затеяна эта образовательная задача – программировать микроконтроллер и осуществить управление через приложение на смартфоне.
Сейчас развёртка передаётся по Bluetooth напрямую через nRF Connect, а интерфейс приложения находится в разработке.
Таким образом, промежуточные результаты работы эстафетной команды следующие:
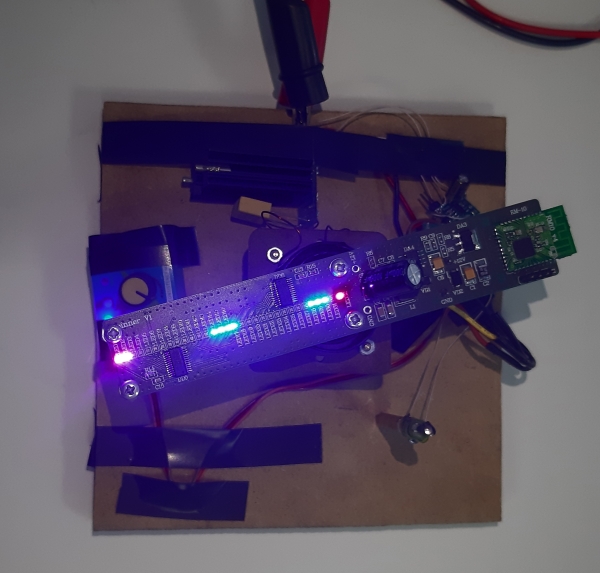
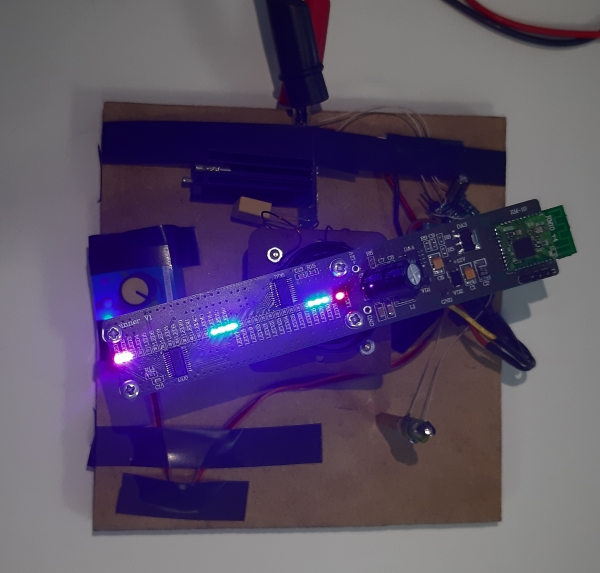
Ротационный экран имеет линейку из 32 светодиодов и диаметр изображения 150 мм. Он отображает 7 цветов, устанавливает изображение или текст за 30 секунд (что не идеально, но для начала приемлемо). Через Bluetooth-соединение можно подать команду на смену изображения.
А так это выглядит
А новым молодым разработчикам для успешного обучения осталось решить следующие задачи:
Побороть нехватку оперативной памяти микроконтроллера для полноцветного отображения цветовой палитры. Доработать приложение для формирования и передачи статичной или динамичной картинки. Придать конструкции законченный вид. Будем держать вас в курсе.
P.S. Разумеется, после окончания работ на Bluetooth LE (nrf52832) мы спроектируем и реализуем Wi-Fi/Bluetooth версию на ESP32 Но это уже будет новая история.

Новичок не обладает необходимыми специализированными компетенциями. Даже опытному специалисту приходится перестраиваться. На руководителя давят вопросы, какие задачи поставить новому сотруднику на старте и какое время на них отвести? Обеспечив при этом заинтересованность, вовлечённость, драйв и интеграцию. Но не рисковать критичными бизнес-задачами.
Для этого мы запускаем эстафетные внутренние проекты. Они состоят из независимых коротких этапов. Результаты таких работ служат фундаментом для последующих разработок и позволяют новичку показать себя, влиться в коллектив с интересной задачей и без риска завалить важный проект. Здесь и наработка опыта, и знакомство с коллегами, и возможность показать себя с лучшей стороны, когда нет жёстких ограничений со стороны legacy.
В качестве примера такой эстафетной разработки стала тема ротационного экрана на основе стробоскопического эффекта с возможностью вывода на него произвольного пользовательского динамического изображения, сделанного на экране телефона.Прототипы можно найти здесь.
Работы выполнялись последовательно несколькими сотрудниками и будут продолжены новыми на время их онбординга (от двух недель до месяца в зависимости от способностей и уровня компетенций)..
Этапы были следующими:
a) продумать конструкцию (изучив имеющиеся образцы, описание аналогов, проявив творческую инициативу);
b) разработать принципиальную электрическую схему, развести ее на плате;
c) разработать протокол для передачи изображения с телефона на девайс;
d) обеспечить управление со смартфона через Bluetooth LE.
Стартовым вариантом предполагалось использовать что-то очень компактное типа трехлепесткового спиннера, который при ручном вращении начинал показывать надписи. В одном лепестке располагался BLE-модуль, во втором – десять RGB-светодиодов, в третьем оптический датчик, в центре — аккумулятор. Была составлена принципиальная электрическая схема и проведены первые эксперименты. Стало ясно, что уровень качества картинки очень низкий, разрешение маленькое, игровой эффект непродолжительный, возможности скромные. Да и спиннеры ушли в прошлое так же быстро, как появились. Было решено поднять планку и разработать поворотный стробоскопический экран. Его как минимум можно использовать в практических целях на выставках и конференциях и в ближайшее время интерес к таким решениям не пропадёт.
По части конструкции основных вопросов было два: как располагать светодиоды (в вертикальной плоскости, как на примере выше или в горизонтальной) и как запитать вращающуюся плату со светодиодами.
В образовательных целях светодиоды были расположены только в горизонтальной плоскости. Что касается питания платы, то стоял важный выбор: либо мы берем коллекторный двигатель громоздкий, шумный, но дешевый, либо используем более изящное решение с бесконтактной передачей питания при помощи двух катушек – одна на двигателе, другая на плате. Решение, конечно, изящное, но более дорогое и долгое, т.к. катушки нужно было сначала рассчитать, а потом намотать (желательно не на коленке).
Так выглядит получившийся прототип
Специфика продукции массового производства такова, что значение имеет каждый лишний цент в себестоимости. Успех может определяться стоимостью горстки пассивки. Поэтому часто приходится выбирать менее эффективный, но более дешевый вариант, чтобы производитель мог сохранять коммерческую конкурентоспособность. Поэтому, представив, что ротационный экран будет запущен в массовое производство, разработчик выбрал коллекторный двигатель.
Получившийся прототип при запуске задорно искрил, шумел и сотрясал стол. Конструкция, обеспечившая устойчивость получилась настолько тяжелой и габаритной, что доводить её до серийного прототипа не имело смысла. Порадовавшись за промежуточный успех, приняли решение заменить двигатель на вращающийся трансформатор с воздушным зазором. Еще одной причиной стала невозможность питать двигатель от USB-порта компьютера.
Основой платы со светодиодами стал наш модуль RM10 и шесть светодиодных драйверов MBI5030.
Драйверы имеют 16 каналов с возможностью независимо управлять каждым. Таким образом, 6 таких драйверов и 32 RGB-светодиода суммарно имеют возможность показывать 16 млн. цветов.
Для синхронизации и стабилизации выводимого изображения было использовано два магниторезистивных датчика Холла MRSS23E.
План был прост – датчик дает прерывание на каждый оборот платы, по такту между двумя проходами определяется положение светодиодов и рассчитывается их азимут и свечение в развёртке 360 градусов.
Но что-то пошло не так – вне зависимости от скорости вращения платы датчик выдавал хаотично то одно, то два прерывания за проход. Таким образом изображение получалось размазанным и складывалось внутрь себя.
Замена датчиков ситуацию не поменяла, поэтому датчик Холла был заменен на фоторезистор.
У кого есть мысли, почему магниторезистивный датчик мог так себя повести, поделитесь в комментариях.
Верхняя сторона платы
С оптическим датчиком изображение получается четкое, но стабилизируется около 30 секунд. Происходит это по комплексу причин, одна из которых – дискретность таймера. Это 4 млн тиков в секунду, делятся на 360 градусов с остатком, который и вносит искажение в выдаваемое изображение.
В китайских стробоскопических часах изображение устанавливается за пару секунд ценой того, что небольшой сегмент круга просто не отображается: на круговом изображении пустое место, на тексте незаметно, но картинка получается неполной.
Однако проблемы не закончились. Микроконтроллер nRF52832 не может обеспечить необходимую скорость передачи данных для возможного количества оттенков (ок. 16 МГц) – экран выдает 1 кадр в секунду, для человеческого глаза этого мало. Очевидно, нужно разместить на плате отдельный микроконтроллер для управления изображением, а пока принято решение заменить MBI5030 на MBI5039. Это всего 7 цветов, включая белый, но этого достаточно для отработки программной части.
Ну и немаловажное, ради чего и была затеяна эта образовательная задача – программировать микроконтроллер и осуществить управление через приложение на смартфоне.
Сейчас развёртка передаётся по Bluetooth напрямую через nRF Connect, а интерфейс приложения находится в разработке.
Таким образом, промежуточные результаты работы эстафетной команды следующие:
Ротационный экран имеет линейку из 32 светодиодов и диаметр изображения 150 мм. Он отображает 7 цветов, устанавливает изображение или текст за 30 секунд (что не идеально, но для начала приемлемо). Через Bluetooth-соединение можно подать команду на смену изображения.
А так это выглядит
А новым молодым разработчикам для успешного обучения осталось решить следующие задачи:
Побороть нехватку оперативной памяти микроконтроллера для полноцветного отображения цветовой палитры. Доработать приложение для формирования и передачи статичной или динамичной картинки. Придать конструкции законченный вид. Будем держать вас в курсе.
P.S. Разумеется, после окончания работ на Bluetooth LE (nrf52832) мы спроектируем и реализуем Wi-Fi/Bluetooth версию на ESP32 Но это уже будет новая история.

