
В научной фантастике, особенно в классических произведениях американских писателей середины прошлого века, очень часто встречаются роботы. Чаще всего они помогают человеку, иногда живут сами по себе, а порой даже воюют с людьми, которые их создали. Но практически всегда — это прямоходящие антропоморфные машины, с двумя ногами и с двумя руками. Удивления достойно то, с каким упорством писатели и сценаристы фильмов стараются наделить машины человеческими чертами.
Современные роботы куда практичнее, они максимально приспособлены для какой-нибудь узкой задачи и выглядят максимально не похоже на людей.
Но есть одна компания, которая, вопреки всем соображениям практичности, создает роботов, максимально похожих на человека и животных — Boston Dynamics. А недавно они научили своего робота танцевать!
Смотрите этот ролик под катом.
Несмотря на все сложности и многочисленные перепродажи компании в разные руки, BD не унывает. У нее амбициозные планы. Научные исследования идут параллельно с коммерческой деятельностью, о чем говорит зажигательный видеоролик, который пару недель назад, под самый Новый год, буквально взорвал интернет. На данный момент у него больше 25 миллионов просмотров, и популярность не спадает.
Это не компьютерная графика, ролик сделан с настоящими роботами, которые реально выполняют именно то, что видно на экране. Первые две минуты сняты одним кадром, без склеек и монтажа. Даже антураж специально выбран для подчеркивания максимального реализма. Это не хромакей и не гламурная сцена. Это ничем не украшенный испытательный зал лаборатории, за стеклом которого можно разглядеть какие-то станки и механизмы, обычные рабочие места, разметку на полу для видеооператора.
Изящные движения, высокие прыжки, синхронные действия, — все это идеально демонстрирует возможности современной робототехники. Как же в Boston Dynamics (BD) добились такого успеха? В этой статье я предлагаю вам краткий экскурс по истории компании, ее успехах и неудачах, а также немного расскажу о том, как снимался этот танец роботов.
В детстве я прочитал один фантастический рассказ, в котором инженер создал самовоспроизводящихся и самообучающихся роботов, а они устроили небольшую войну между собой, борясь за высокотехнологичные ресурсы для апгрейда. В этом рассказе мне запомнилась одна деталь: первый робот, получив самостоятельность, заменил практичный антигравитационный привод на примитивные ноги, как у своего создателя. Инженер был категорически против, но робот не стал слушать его аргументов. Впоследствии это сыграло с роботом злую шутку: он споткнулся во время сражения и был раздавлен сородичами, чего не произошло бы, оставь он антиграв.
Практически все современные роботы, на колесах или же на гусеницах, это просто и надежно. Нет проблем с равновесием, эксплуатация чаще всего ограничивается помещениями с ровным полом.
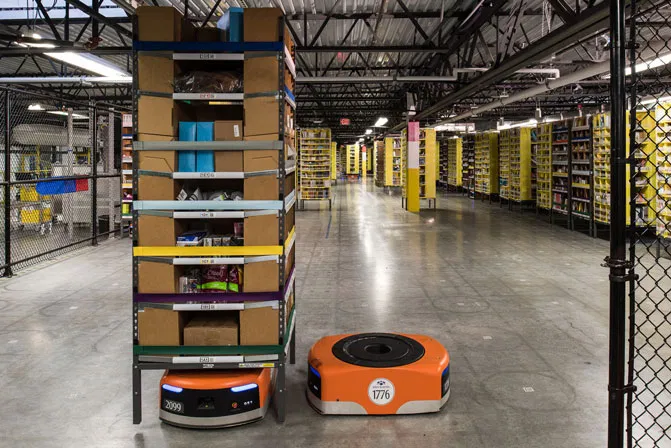
Роботы на складе Amazon
BD решили воплотить в реальность мечту научных фантастов:

Робот Atlas
Как все начиналось
Эволюция человека и животных наглядно доказала, насколько универсальны конечности. С их помощью можно ходить, бегать, карабкаться по склонам гор и стволам деревьев, шагать по лестнице. Приматы зашли в этой универсальности дальше всего.
Долгое время прямохождение не давалось инженерам. Гироскопы были слишком громоздкие, аналоги компактного вестибулярного аппарата с обратной связью не получалось создать из-за примитивной электронно-технической базы. Но появление доступных микроконтроллеров позволило воплотить в реальность эту мечту инженеров. Из всех коллективов, занимающихся шагающими роботами, известнее всего Boston Dynamics.
Вдохновителем и бессменным руководителем этой лаборатории является Марк Рэйберт.

Марк Рэйберт
В 1973 году он закончил Бостонский Северо-Восточный университет по специальности «Электротехника», а в 1979 получил субсидию на разработку первой прыгающей машины, от известного американского ученого и изобретателя Айвена Сазерленда.

Айвен Сазерленд
В 1980 году он сумел заинтересовать своей разработкой DARPA (тогда еще ARPA), получил от них первое финансирование и открыл Leg Laboratory. Первоначально она располагалась в Университете Карнеги-Меллона, где Марк работал профессором, а потом, вслед за ним, переехала в Массачусетский Технологический.

Leg Laboratory
На сайте MTI еще сохранилась страничка этого научного коллектива, созданная задолго до современных трендов дизайна и веб-разработки. Теплый и ламповый web1 выглядит довольно трогательно. Очень рекомендую зайти по ссылке и посмотреть, с чего начиналась история этого известного научного коллектива.
В 1983 году была готова их разработка под названием «3D One-Leg Hopper»:

Одноногий прыгун мог балансировать или передвигаться прыжками в заданном направлении и сохранять равновесие, если его пытались уронить. Необычный способ передвижения был выбран, потому что обсчитывать балансировку на одной ноге проще всего.
На следующем видео можно посмотреть роботов созданных в Leg Laboratory. Все они чисто исследовательские механизмы, без всякой практической ценности, созданные исключительно для изучения работы суставов, приводов на разном принципе работы и математических алгоритмов движения. Некоторые являются составляющими частями более сложных конструкций. Часть из них не способна сохранять равновесие самостоятельно и движется с помощью штанги с противовесом. «Голые» роботы заставляют вспомнить фильм про Терминатора, а интерьеры лаборатории — мастерскую Джейме и Адама из «Разрушителей мифов»
Накопленный опыт исследований Марк выразил в своей книге Legged Robots That Balance, вышедшей в 1986 году.
От лаборатории к компании. Работа на военных
Время не стоит на месте. Чтобы получить больше финансовой независимости, Марк в 1995 году принимает решение покинуть Университет. Он окончательно уходит в собственную компанию, основанную в 1992 году. Название этой фирмы сейчас на слуху даже у тех, кто не интересуется современными технологиями, благодаря зрелищным видео, демонстрирующих достижения современной робототехники: Boston Dynamics.
Как и в самом начале своей карьеры, Марк получает финансирование от военных. DARPA дает его компании задания на разработку «рабочего мула», который сможет переносить значительные грузы по местности, где обычным машинам не проехать. По ТЗ робот должен уметь карабкаться, преодолевая значительный уклон, преодолевать заросли кустарника, проходить по скользким и сыпучим поверхностям, то есть уметь все то, на что способен пехотинец или… мул.
Выполнение этого задания было делом не простым. Только в 2005 году была представлена модель BigDog.
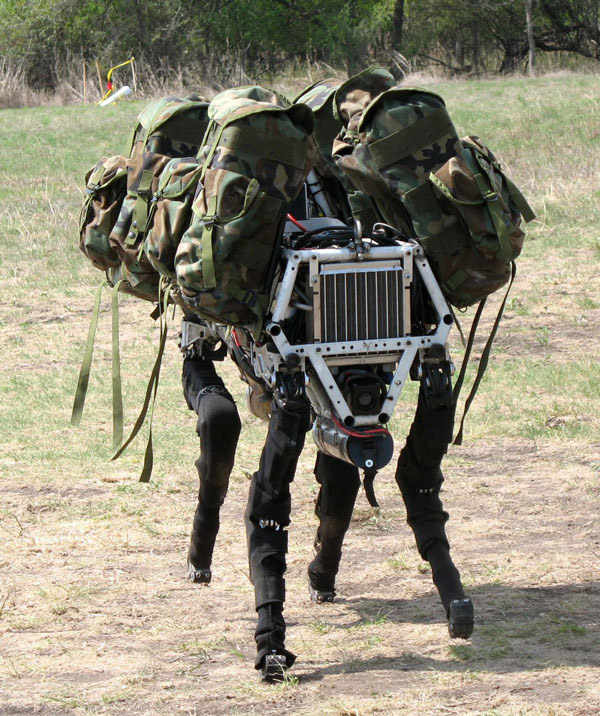
Проект был чрезвычайно амбициозен. Это была первая разработка подобного плана, и ее медийный успех превзошел все ожидания. Новости о роботе можно было услышать из каждого утюга, множество видеороликов получали рекордные просмотры.
До сего момента наиболее широко известные модели шагающих роботов были чисто развлекательными изделиями при передвижении, неуклюжими и неповоротливыми. Они падали от малейшего толчка, а передвигаться могли только по идеально ровному полу. Но BigDog выглядел как машина из будущего, универсальная практичная. Люди были заворожены зрелищем автономного механизма шагающим как живое существо и способным переносить значительный груз. Детище компании Марка полностью соответствовало завету легендарного Артура Кларка: «Любая достаточно развитая технология неотличима от магии». Дошло даже до того, что люди снимали пародии на это механическое существо:
К сожалению, технически робот был не настолько успешен, как можно было судить по видео. Даже второе поколение, выпущенное в 2008 году, имело слишком много недостатков. В 2013 году Министерство обороны США отказалось от продолжения этой программы. Одной из главных проблем был сильный и демаскирующий шум двигателя внутреннего сгорания, от которого инженерам так и не удалось избавиться. Вторая проблема была в том, что несмотря на формальное выполнение ТЗ, характеристики робота все-таки были недостаточны для того, чтобы полноценно участвовать в реальных боевых задачах. Проходимость хоть и впечатляла, но военным ее не хватало. Автономность составляла всего 30 км, это расстояние робот проходил со скоростью пешехода. Поскольку робот был технически чрезвычайно сложным устройством, опытные образцы имели серьезные проблемы с надежностью. Первые варианты едва выдерживали полчаса непрерывной работы, прежде чем в механизме что-то ломалось, и он становился неспособным к дальнейшему функционированию. Последние модели робота уверенно работали до трех часов, но это все равно чрезвычайно мало, а отремонтировать такое сложное устройство в полевых условиях практически невозможно. Поломка поставила бы под угрозу любую реальную боевую операцию, если бы в ней возлагались большие надежды на этого помощника. Кроме того, производство робота было очень и очень дорогим.
Тем не менее, хоть от развития этой модели отказались, военные не прекратили сотрудничество с BD. В продолжении исследований было выпущено еще несколько разновидностей шагающих, бегающих, даже прыгающих и ползающих роботов.

На тумбе стоит Little Dog (младший электрический брат BigDog), Spot, BigDog, WildCat, LS3 (старший военный брат BigDog)

SANDFLEA — Блоха.
Робот-кроха (15 см в высоту), способный подпрыгивать на высоту более двух метров с помощью баллончика со сжатым газом.

RHEX.
По размерам, примерно как SANDFLEA, способен перебираться через небольшие препятствия и ползать даже по болотистой местности.
Финансовые вопросы
Работая с военными, компания несколько раз переходила из рук в руки. В конце 2013 года компанию купил Google. Сложно сказать зачем они это сделали. Возможно просто в процессе скупки разных компаний вместе с несколькими другими робототехническими компаниями и стартапами, возможно в погоне за портфелями патентов и в расчете на прибыль. За время сотрудничества BD и Google не смогли найти общий язык. После того, как Google покинул Энди Рубин, который выступил инициатором сделки, будущее компании оказалось подвешенным. Сам Энди говорил, что его разочаровала скорость разработки, ведь даже на предварительные исследования уходило очень много времени. В интернет-гиганте не желали вкладывать столько денег в компанию, коммерческих результатов от которой приходится ждать 10 лет и больше. Вдобавок, видео, в котором последнюю модель человекообразного робота толкают и сбивают с ног, не понравилось рекламному отделу Google
(На 1,22 робота толкают клюшкой и «отбирают» коробку, на 2,04 его сбивают с ног толчком в спину)


Кроме того, антропоморфность робота вызвала удивительное сопереживание у зрителей, которые разглядели в демонстрации алгоритмов баланса — издевательства и сочувствовали роботу.
В интернет попало письмо, написанное руководителем PR-отдела Google Кортни Хон, в котором она пишет, что человекоподобные роботы напрягают людей тем, что они видят в них угрозу, будто эти роботы способны отнять у них работу. Наконец, в 2016 году Google решает продать BD. По слухам, купить компанию хотели Amazon и Toyota. В итоге она досталась японскому холдингу Softbank.
На этом финансовые приключения BD не закончились. Совсем недавно стало известно, что компания в очередной раз продается. В декабре прошлого года Softbank с Hyundai сошлись на скромной сумме, около миллиарда долларов.
Тем не менее, все это не мешало разрабатывать новых роботов. Кроме Atlas, над которым издевались клюшкой, был разработан робот с гибридным способом передвижения: Handle. Ноги робота заканчиваются колесами, которые позволяют ему быстро перемещаться по ровной поверхности, спускаться по лестницам. При необходимости он может даже подпрыгнуть
Первая коммерческая модель
Сравнительно недавно на сайте компании открылся раздел с магазином, и BD, впервые за почти 30 лет, предлагает коммерческую модель: Spot. Несмотря на собачью кличку (Спот — пятнышко), робот предлагается для коммерческого использования на индустриальных объектах и не предназначается для домашней эксплуатации. Скромные размеры (робот немного больше Немецкой овчарки), предполагают скромные возможности: всего полтора часа в активном режиме, в то время как аккумулятор заряжается два часа.

Над дизайном очень хорошо поработали. Робот уже не напоминает Терминатора и двигается довольно изящно, его конечности не топчутся на месте, как у прошлых версий четвероногих роботов. Цена в базовой комплектации — $75.000. Сложно сказать, много это или мало, потому что подобных предложений на рынке можно пересчитать по пальцам одной руки. Несмотря на пандемию и общий спад, компания заявляет, что произвела около 400 роботов этой модели и не собирается останавливаться на достигнутом.
Танец
После того, как вспомнили историю компании и рассмотрели некоторые модели роботов, можно немного поговорить о том, как же создавался зажигательный танец. Для этого я подготовил сокращенную версию интервью с Аароном Сондерсом, вице-президентом по инженерным вопросам Boston Dynamics, которое взял у него журнал IEEE Spectrum, издаваемый американским «Институтом инженеров по электронике и электротехнике».
Рок-н-ролльный сингл, который звучит в ролике, был записан группой The Contours в 1962 году. Песня «Do You Love Me» — одно из самых известных их произведений. Хореографом выступила Моника Томас из коллектива MAD KING THOMAS.
До этого момента, роботы и инженеры BD никогда не занимались ничем подобным. Имеющийся набор движений включает много элементов ходьбы, бега и прыжков, некоторые упражнения из гимнастики и даже паркура. Но заставить механизмы плясать еще никто не пробовал. Изначально танец создавался при помощи программы компьютерного моделирования, в которой проводили адаптацию человеческих танцевальных движений под физические возможности роботов. После того, как выбиралось то или иное движение, симуляцию показывали инженерам. Они смотрели на экран и говорили что-то вроде: «Это будет легко!», или: «Это будет сложно!», или: «Это меня пугает!». По мере работы над проектом был разработан набор инструментов, с помощью которых программировались балетные движения роботов на высоком уровне. Таким образом, танец показанный в ролике, — это не скрипт, где вручную записываются все мельчайшие детали, это продукт работы программного конвейера, объединяющего отдельно разработанные элементы и преобразующего их в массив данных, которые потом загружаются в машину.
Сложнее всего было запрограммировать вращательные движения, потому что они больше всего отличаются от элементов, которые используются при беге и прыжках. Тем не менее, ловкость и баланс, которые необходимы для выполнения уже отработанных движений, оказались достаточными для программирования танца. До этого эксперимента основной упор был сделан на движении ног, прыжках и беге. В этом случае больше всего используется нижняя часть тела роботов. Следующий шаг усложнения моделей поведения — развитие танцевальных движений, использование рук для того, чтобы толкать или тянуть. Одной из новых задач, поставленных перед командой, было расширение мобильности за счет верхней части тела робота.
В Атласах не используются контроллеры с машинным обучением, но в них используется то, что в компании называют рефлексивным управлением (предиктивные контроллеры работающие с прогнозирующими моделями, учитывающие динамику и равновесие, оптимизируя траекторию в режимах онлайн и оффлайн).
Этот эксперимент позволил много узнать о надежности роботов и их возможностях. Коммерческий робот Спот, в отличии от чисто исследовательских моделей Атлас, разрабатывался для непрерывной эксплуатации. Он показал отличные результаты и мог танцевать целый день, почти не требуя обслуживания. Атласов же сделано всего несколько экземпляров, они не предназначены для длительной и непрерывной работы. В этом отношении они больше похожи на вертолет, у которого время подготовки и технического обслуживания больше, чем время полета. Спот больше походит на автомобиль, который больше ездит, чем обслуживается.
Атласы пришлось специально модифицировать для этой программы, увеличив их мощность. Хотя трюки и прыжки с перекатами, который демонстрируют эти роботы, выглядят очень резкими, движения в танце требуют еще больше скорости и силы.
Сложно сказать, как дальше будет развиваться компания. Сам Марк уже не молод, ему 71 год. Google не смогла найти в BD коммерческий потенциал. Когда Softbank покупала компанию, сумма сделки не разглашалась, потому сложно сказать, выгодной ли была продажа BD корейскому автомобильному гиганту, или нет. Никаких особых коммерческих успехов за то время, что компания провела с Softbank, вроде бы, не наблюдалось. Hyundai надеется использовать компанию для развития автопилотов в своих машинах и роботизации производства. Может, ей удастся извлечь практическую выгоду из союза с BD.
Дело в том, что Марк и его коллеги — это Ученые, с большой буквы. Они занимаются исследованиями в чистом виде, не задумываясь о монетизации своих знаний. Теоретические знания полученные за тридцать лет огромны. Найдется ли им практическое применение в ближайшем будущем, сказать очень сложно. Хоть и кажется, что это прикладные инженерные исследования, труды по которым лежали невостребованные столетиями, что далеки от теоретической физики и высшей математики, у них много общего. Например, одно из главных ограничений, это питание. Экспериментальный робот Гепард даже не задумывался для автономного использования. Это был испытательный стенд для обкатки технологий, не работающий без постоянного подключения к розетке. У БольшогоПса основной проблемой был двигатель внутреннего сгорания, у Пятнышка автономность (всего полтора часа, даже без учета навесного оборудования), и скорость как у пешехода.
Может, использование машинного обучения в контроллерах приведет к очередному техническому прорыву, может, изобретут более емкие и компактные источники питания. Сложно предсказать будущее компании. Пожелаем им удачи!


