В предыдущих сериях мы обсудили, что такое сингулярное разложение (SVD), и сформулировали модель сингулярного разложения с базовыми предикторами. В прошлый раз мы уже довели дело до конкретных формул апдейта. Сегодня я продемонстрирую очень простую реализацию очень простой модели, мы применим её к уже знакомой матрице рейтингов, а потом обсудим, какие получились результаты.
Итак, SVD на Perl. Готовый скрипт, который можно запускать в виде
Как видите, совершенно ничего страшного – нужно просто запустить процесс апдейта весов и продолжать его до сходимости. Сходимость определяется по RMSE (root mean squared error) – среднеквадратической ошибке, т.е. корню из сумме квадратов ошибок, поделённой на число тестовых примеров. Мы реализуем стохастический градиентный спуск: после каждого тестового примера мы сразу меняем параметры, а не собираем статистику об ошибке по всей базе.
Когда RMSE перестаёт заметно улучшаться, мы уменьшаем скорость обучения; при таком подходе рано или поздно процесс должен сойтись (т.е. RMSE должно перестать меняться). Что такое здесь λ – обсудим в следующий раз, сегодня она в наших примерах будет равна нулю.
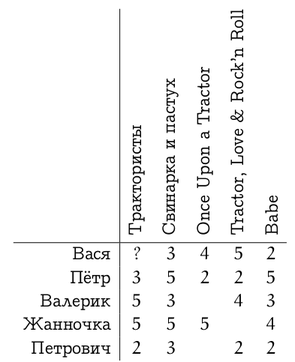
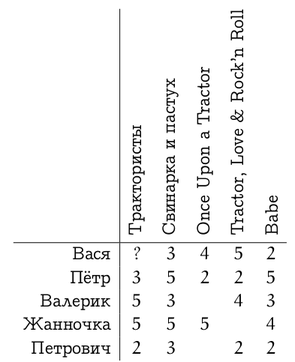
Теперь применим то, что у нас получилось, к матрице рейтингов, которую мы рассматривали в одном из первых текстов.
В подходящем формате его можно скачать здесь (порядок сохранён). После запуска нашего скрипта на этом датасете мы получим примерно следующее.
Но самое интересное – мы получили разумное разложение оставшихся пользовательских предпочтений на два фактора. Пример, конечно, игрушечный, и в датасете изначально было заложено, что фильмы делятся на фильмы «про поросят» и «про тракторы»; некоторые пользователи больше любят мощную технику, а некоторые – свиной хрящик.
И действительно, видно, что первый фактор – это то, насколько фильм «про тракторы», а второй фактор – то, насколько он «про поросят»; конкретные значения глубокого смысла не имеют, важно только их соотношение.
Кстати, датасет я специально не подгонял, и в данном случае произошёл забавный случай со знаками: SVD обучил отрицательные значения факторов «про тракторы» для двух пользователей, которым тракторы нравятся, Васи и Валерика. Но вместе с этим SVD обучил отрицательные значения для факторов «про тракторы» у фильмов, которые действительно про тракторы – минус на минус даст плюс. А 1.0220 Петра как раз, наоборот, означает, что тракторы его по сравнению с поросятами совершенно не интересуют…
Мы теперь можем предсказать значение рейтинга Васи для «Трактористов» как
Что ж, действительно можно было предположить, что «Трактористы» Васе понравятся.
В следующий раз мы поговорим об оверфиттинге и регуляризации – что это такое, зачем это надо и как это внедрить в SVD.
Итак, SVD на Perl. Готовый скрипт, который можно запускать в виде
./svd.pl число_признаков dataset.csv# обучение SVD: обучаем, пока не сойдётся
while (abs($old_rmse - $rmse) > 0.00001 ) {
$old_rmse = $rmse;
$rmse = 0;
foreach my $u ( keys %l ) {
foreach my $v ( keys %{$l{$u}} ) {
# считаем ошибку
$err = $l{$u}{$v} - ($mu + $b_u[$u] + $b_v[$v] + dot($u_f[$u], $v_f[$v]) );
# возводим в квадрат
$rmse += $err * $err;
# применяем правила апдейта для базовых предикторов...
$mu += $eta * $err;
$b_u[$u] += $eta * ($err - $lambda2 * $b_u[$u]);
$b_v[$v] += $eta * ($err - $lambda2 * $b_v[$v]);
# ...и для векторов признаков
for (my $f=0; $f < $features; ++$f) {
$u_f[$u][$f] += $eta * ($err * $v_f[$v][$f] - $lambda2 * $u_f[$u][$f]);
$v_f[$v][$f] += $eta * ($err * $u_f[$u][$f] - $lambda2 * $v_f[$v][$f]);
}
}
}
++$iter_no;
# нормируем суммарную ошибку, чтобы получить RMSE
$rmse = sqrt($rmse / $total);
print "Iteration $iter_no:\tRMSE=" . $rmse . "\n";
# если RMSE меняется мало, нужно уменьшить скорость обучения
if ($rmse > $old_rmse - $threshold) {
$eta = $eta * 0.66;
$threshold = $threshold * 0.5;
}
}
Как видите, совершенно ничего страшного – нужно просто запустить процесс апдейта весов и продолжать его до сходимости. Сходимость определяется по RMSE (root mean squared error) – среднеквадратической ошибке, т.е. корню из сумме квадратов ошибок, поделённой на число тестовых примеров. Мы реализуем стохастический градиентный спуск: после каждого тестового примера мы сразу меняем параметры, а не собираем статистику об ошибке по всей базе.
Когда RMSE перестаёт заметно улучшаться, мы уменьшаем скорость обучения; при таком подходе рано или поздно процесс должен сойтись (т.е. RMSE должно перестать меняться). Что такое здесь λ – обсудим в следующий раз, сегодня она в наших примерах будет равна нулю.
Теперь применим то, что у нас получилось, к матрице рейтингов, которую мы рассматривали в одном из первых текстов.
В подходящем формате его можно скачать здесь (порядок сохранён). После запуска нашего скрипта на этом датасете мы получим примерно следующее.
Read 5 users and 5 urls.
Iteration 1: RMSE=1.92845291697284
Iteration 2: RMSE=1.28481736445124
Iteration 3: RMSE=1.14159530044051
...
Iteration 808: RMSE=0.0580161117835789
Iteration 809: RMSE=0.0580061123741253
mu: 2.54559533638261
User base: 0.7271 0.1626 0.7139 1.9097 -0.9677
Item base: 0.8450 0.6593 0.2731 0.7328 0.0354
User features
user 0: -0.5087 -0.8326
user 1: 1.0220 1.2826
user 2: -0.9509 0.2792
user 3: 0.1031 -0.4814
user 4: 0.6095 0.0557
Item features:
item 0: -0.8368 0.2511
item 1: 1.1101 0.4120
item 2: -0.4159 -0.4073
item 3: -0.3130 -0.9115
item 4: 0.6408 1.2205Но самое интересное – мы получили разумное разложение оставшихся пользовательских предпочтений на два фактора. Пример, конечно, игрушечный, и в датасете изначально было заложено, что фильмы делятся на фильмы «про поросят» и «про тракторы»; некоторые пользователи больше любят мощную технику, а некоторые – свиной хрящик.
И действительно, видно, что первый фактор – это то, насколько фильм «про тракторы», а второй фактор – то, насколько он «про поросят»; конкретные значения глубокого смысла не имеют, важно только их соотношение.
Кстати, датасет я специально не подгонял, и в данном случае произошёл забавный случай со знаками: SVD обучил отрицательные значения факторов «про тракторы» для двух пользователей, которым тракторы нравятся, Васи и Валерика. Но вместе с этим SVD обучил отрицательные значения для факторов «про тракторы» у фильмов, которые действительно про тракторы – минус на минус даст плюс. А 1.0220 Петра как раз, наоборот, означает, что тракторы его по сравнению с поросятами совершенно не интересуют…
Мы теперь можем предсказать значение рейтинга Васи для «Трактористов» как
2.5456 + 0.7271 + 0.8450 + (-0.5087)*(-0.8368) + (-0.8326)*0.2511 = 4.3343143.
Что ж, действительно можно было предположить, что «Трактористы» Васе понравятся.
В следующий раз мы поговорим об оверфиттинге и регуляризации – что это такое, зачем это надо и как это внедрить в SVD.
