Робо-рука, разработанная командой исследователей из EPFL способна ловить летящие по разным траекториям предметы самых различных форм.
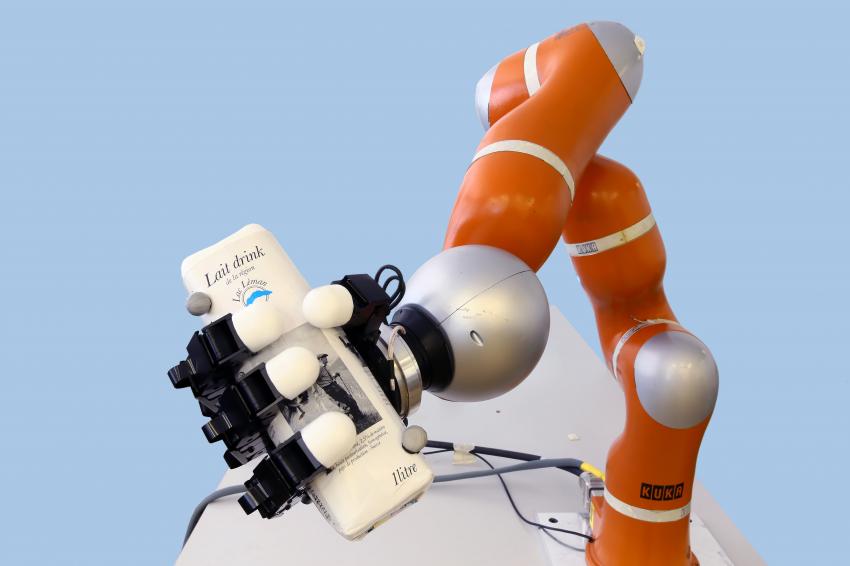
Вот он стоит неподвижно с открытой ладонью, а мгновение спустя, вдруг раскручивается и ловит все виды летящих объектов, брошенных в его направлении, начиная с теннисной ракетки и заканчивая мячиком. Рука состоит из трех суставов и четырех пальцев, общей длиной около 1,5 метров. Программированием данного робота занималась лаборатория EPFL — LASA (Learning Algorithms and Systems Laboratory). Он уникален тем, что способен ловить предметы различной неправильной формы, при этом принимая решение менее чем за 0,05 секунды.
Все больше и больше в нашей повседневной жизни присутствуют роботы для выполнения различных задач, а с возможностью поймать объект или увернуться от сложных объектов находясь в движении, они смогут стать еще мобильней и выполнять еще больше функций. - говорит Aude Billard, глава LASA
Этот манипулятор уже имеет реальную возможность применения в космосе. На прямую это связано с проектом Швейцарского Космического Центра в EPFL, целью которого является разработка технологий для утилизации космического мусора на орбите вокруг Земли. Встроенная в спутник такая рука, наблюдая за летящими объектами в космосе, способна ловить пролетающий мусор.
Машины в наше время в основном не способны быстро усвоить изменения данных. Следовательно, их выбор состоит в пересчете траектории, что требует слишком долгого времени от них в ситуации, где каждая доля секунды может стать решающей. -добавила Aude Billard, глава LASA
Чтобы получить ожидаемую быстроту реакции и приспособляемость, работники LASA стали применять метод схожий с методом проб и ошибок, называемый Programming by demonstration. Рука в данном случае направляется вручную, повторяя те движения которые должны происходить при ловли объектов.
Эксперимент был проведен по ловле мяча, пустой бутылки, наполовину полной бутылки, молотка и теннисной ракетки. Эти пять разных объектов были выбраны потому, что они предлагают разнообразный спектр ситуаций, где часть объекта, который робот должен поймать (например, ручка ракетки) не соответствуют его центру тяжести. В случае с бутылкой появляется дополнительная проблема, так как его центр тяжести перемещается несколько раз в течение своего полета.
На первом этапе эксперимента, объекты были брошены несколько раз в направлении робота. Через серию камер, расположенных вокруг робота, он создает модель летящего объекта и вычисляет его траекторию полета, скорость и вращательное движение. Ученые смогли перевести все в уравнение, которое позволяет роботу выбирать позицию очень быстро в правильном направлении. В течение всего нескольких миллисекунд, робо-рука уточняет и корректирует траекторию объекта в реальном времени и с высокой точностью его ловит.
