
Желание покорить небеса у человека было еще с незапамятных времен, что подтверждается знаменитым древнегреческим мифом про Икара. Технологический прогресс и неутолимое любопытство человека позволило создать машины, позволяющие нам уподобиться птицам. Поначалу самолеты были немного неуклюжими, не особо безопасными, и с очень ограниченными способностями. Сейчас же есть самолеты, способные на такие элементы высшего пилотажа, о каких древние греки и не мечтали. Но за каждым пилотируемым устройством стоит человек, который им управляет. Пилоты истребителей, к примеру, должны обладать чрезвычайной выносливостью и невероятной скоростью реакции, что достигается путем долгих тренировок. Кому тренировки не нужны, так это ктырям (Holcocephala fusca) — хищным мухам, поведение которых во время охоты очень напоминает истребитель во время перехвата. Ученые из Миннесотского университета (США) решили выяснить, как этим мухам удается облетать препятствия и сохранять внимание на добыче во время полета. Какие опыты провели ученые, что они показали, и как можно применить полученные данные? Ответы на эти вопросы мы найдем в докладе ученых.
Основа исследования
Как уже было сказано ранее, главным героем данного исследования является муха вида Holcocephala fusca из семейства Asilidae, которую в английском языке нелестно называют «gnat ogre» (т.е. мошка-огр или мошка-людоед).

Holcocephala fusca с добычей в лапах.
Семейство Asilidae (ктыри) также имеет своеобразное альтернативное наименование — «assassin flies» (т.е. мухи-убийцы). Это связано с гастрономическими предпочтениями этого двукрылого насекомого. Они охотятся на других насекомых, порой даже на представителей своего же вида. Агрессивность этих мух настолько высока, что они способны без тени сомнения нападать на пчел, ос и жуков-скакунов. Необычно это тем, что эти насекомые обладают неслабой защитой. Хоботок ктырей не имеет мандибул (жвал), однако совокупность других частей ротового аппарата (максиллы, подглоточник и нижняя губа) образуют своеобразное копье, которым муха протыкает жертву. Помимо этого ктыри впрыскивают сильнодействующий яд, который может мгновенно умертвить добычу. Стоит также отметить, что эти мухи обладают удивительно острым зрением, а их фасеточные глаза занимают большую часть головы.

Фасеточные глаза Holcocephala fusca.
Но не только зрение помогает ктырям ловить свою добычу. Немаловажной частью являются и крылья, форма которых часто довольно узкая, что способствует быстрому полету. Обычно крылья ктырей бесцветные, но бывают виды с затемненными или частично затемненными крыльями.

Внешний вид крыльев Holcocephala fusca.
Авторы исследования отмечают, что поиски вдохновения в природе для совершенствования навигационных возможностей различных устройств (самолетов, дронов и т.д.) является вполне логичным решением. Способность ориентироваться в загроможденной среде и избегать препятствий проверялась на многих животных, в том числе на саранче, плодовых мушках, голубях и даже людях. Однако в этих трудах внимание уделялось исключительно уклонению от препятствий.
Более сложной задачей является навигация, когда имеется конкретная цель движения, т.е. необходимо не просто избегать препятствий, а учитывать траекторию к желаемой точке назначения движения. Задача обхода препятствий еще более усложняется, когда цель находится в движении или когда препятствия временно закрывают цель. Для человека такая задача может быть сложной, но для мухи Holcocephala fusca (1А) это часть ее жизни.
В естественной среде обитания H. fusca усаживается в удобном месте с хорошим обзором и высматривает добычу. Но ветки, листья и другие объекты могут преграждать ей обзор. В таких случаях муха должна маневрировать в полете как для перехвата цели, так и для уклонения от препятствия. Порой эти две задачи могут конфликтовать, а потому одна должна быть приоритетнее другой.
H. fusca после удачной охоты.
Любопытно, что поведение в полете мух-огров очень напоминает таковое у соколов, ястребов и даже у современных управляемых ракет. Система, которую задействуют мухи, аналогична пропорциональной навигации (Pro-Nav от proportional navigation), в которой вращение линии визирования (LOS от line-of-sight) на цель увеличивается и применяется к вращению скорости перехватчика. В уравнении ниже представлена чистая пропорциональная навигация: γ = Nλ, где γ — поворот по курсу перехватчика, λ — поворот LOS относительно внешнего мира и N — навигационная постоянная.
Навигационная постоянная обеспечивает усиление для реактивной системы, и поэтому от нее зависит путь перехватчика. Правильная установка значения N имеет решающее значение в использовании Pro-Nav для успешного объяснения поведения перехватчика. Поведение H. fusca лучше всего описывается навигационной константой N≈3.
В рассматриваемом нами сегодня труде ученые поставили перед собой задачу ответить на два фундаментальных вопроса: как меняется путь перехвата мухи-огра, когда на пути имеются препятствия и как реагирует система наведения мухи, когда препятствие закрывает цель.
Подготовка к опытам

Изображение №1
В ходе опытов использовалась движущаяся цель в виде черной бусинки диаметром 1.3 мм, прикрепленной к тонкой леске, натянутой вокруг U-образной рамы из плексигласа, и перемещаемой с помощью шкивов и шагового двигателя со скоростью 0.32 м/с. В качестве препятствия использовалась полоса из черного ацетата, расположенная прямо под траекторией движения цели (1B). Полоса была выполнена в двух вариантах толщины: тонкая (2.5 см) и толстая (5 см), что соответствовало углу наклона 4.8° или 9.5° при размещении на расстоянии 30 см от сидящего насекомого перед взлетом. Точное расположение полосы и начальная траектория мухи определяли, являлся ли объект (полоса) препятствием на траектории полета и заслонял ли он цель.
Результаты исследования
В ходе опытов с помощью высокоскоростной съемки было зафиксировано 26 полетов H. fusca, взлетающих вслед за движущейся целью. В 17 из зарегистрированных траекторий цель была временно перекрыта препятствием. Если цель была закрыта тонкой полосой, H. fusca прекращала атаку в 14% случаев (1/7 испытаний). Если же полоса была толстой (5 см), то атака прекращалась в 100% случаев (10/10 испытаний).
Минимальная продолжительность перекрытия цели, приведшего к прекращению траекторий, составила 60 мс (тонкая полоса), максимальная — 306 мс (толстая полоса). В случаях, когда муха продолжила полет, минимальная продолжительность скрытия цели составила 60 мс, а максимальная — 72 мс (тонкая полоса).
Таким образом, существовала корреляция между продолжительностью перекрытия цели и вероятностью продолжения атаки после этого. Следовательно, полеты с кратковременным перекрытием куда вероятнее будут продолжены.
Изображение №2
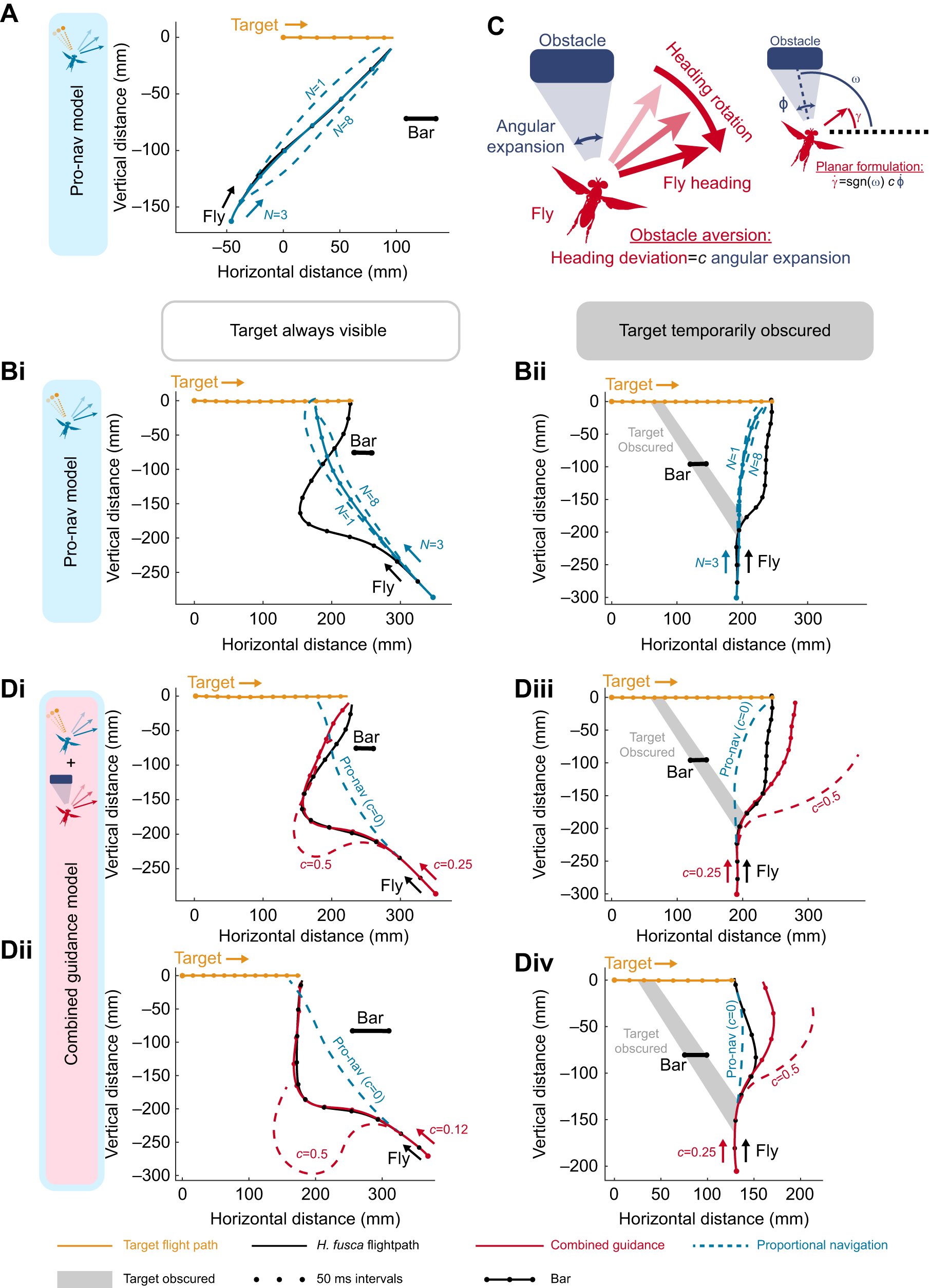
Как и ожидалось, когда расположение преграды не мешало ходу атаки, Pro-Nav может охарактеризовать траекторию перехвата (2А). Напротив, если H. fusca летела в непосредственной близости от преграды, и, исходя из текущей траектории цели, она могла выступать в качестве визуально заметного препятствия. Из-за этого H. fusca резко отклонялась от своего пути (n = 8). Pro-Nav явно не удалось предсказать траекторию полета хищника в таких условиях (пример на 2Bi). Мухи также отклонялись от курса, предсказанного Pro-Nav моделью, когда полоса временно закрывала цель (n=6) (пример показан на 2Bii).
Курс, выбранный H. fusca к цели при наличии препятствия, неизменно уводил его дальше от препятствия. Это предполагало включение в навигационную систему дополнительного аспекта — избегание препятствия. Для реализации этого поведения необходима информация, которая легко доступна мухам (2C). Ученые считают, что муха не знала ни физического местоположения, ни абсолютного расстояния до препятствия. В таких условиях скорость изменения углового размера препятствия (в результате перемещения H. fusca во время полета) становится решающим признаком. Это связано с тем, что визуальное расширение сетчатки указывает как на близость, так и на скорость приближения препятствия. Таким образом, более высокие темпы расширения объектов должны вызывать более явную ответную реакцию и, соответственно, маневрирование.
Из комбинации скорости изменения углового размера и угла курса цели можно сгенерировать очень простой алгоритм уклонения: γ = sgn(ω)cφ, где φ — скорость изменения угловой ширины препятствия; ω — пеленг препятствия от курса полета, знак которого (sgn) обозначает направление угла (влево или вправо от перехватчика); c — безразмерная константа.
Чтобы эта модель работала, важно учитывать, что препятствия, которые удаляются и уменьшаются в угловом размере, вряд ли будут иметь отношение к столкновению, поэтому предполагается, что аверсивный элемент должен быть активен только при φ ﹥ 0.
Кроме того, муха, вероятно, будет визуально фиксировать цель, особенно когда цель движется во время охоты. Это может привести к ограничению поля зрения вокруг цели или интересующей области. Это ограничение означает, что внимание мухи должно быть сконцентрировано исключительно на препятствиях в пределах определенного углового диапазона от прямой видимости до цели.
Данное уточнение можно внести в уравнение пропорциональной навигации. Полученная модель была названа «комбинированное маневрирование»: γ = Nλ + sng(ω)cφ.
Предположение о том, что уклонение от препятствий работает в ограниченном поле зрения, подтверждается траекториями полета, которые согласуются с Pro-Nav моделью, несмотря на то, что они находятся в пределах 15 мм от столкновения с препятствием, когда линия прямой видимости цели направлена в сторону от препятствия.
Когда препятствие находилось в непосредственной близости от мухи, одна только Pro-Nav не могла полностью соответствовать завершенным траекториям (2B). Добавление алгоритма уклонения значительно улучшает соответствие модели (2D).
Интересно, что траектория полета, созданная комбинированной моделью, хорошо подходит, когда цель изначально скрыта. Однако после выхода цели по другую сторону препятствия мухи совершают разворот гораздо более крутой, чем предсказывает комбинированная модель (2Diii, 2Div).
Если атака продолжалась после того, как цель была скрыта, это называлось повторной атакой (повторный захват цели). В текущей модели наведения H. fusca есть два очевидных способа, с помощью которых можно вызвать более резкий поворот мухи назад к цели во время повторного захвата, когда цель становится видимой по другую сторону препятствия.
Первый заключается в безразмерном навигационном усилении Pro-Nav с постоянной N. Использование более высокой навигационной постоянной в комбинированной модели позволяет быстрее вернуться на курс перехвата для заданной скорости вращения LOS.
Второе объяснение заключается в расширении алгоритма избегания препятствий, т.е. оптомоторной инверсии, что также наблюдается и у дрозофил. Ученые решили протестировать оба объяснения с помощью моделирования.

Изображение №3
Увеличение N в комбинированной модели увеличило ее соответствие реальным траекториям, при которых муха направлялась к цели после того, как она была закрыта препятствием (3А). Прирост наилучшего соответствия был переменным, но варьировался около N≈10. Благодаря этому приросту показатель модели улучшился для всех полетов с повторным захватом, но этот эффект не был значительным (от среднего балла = 73±6% до среднего балла = 80±6%). Более того, в то время как комбинированная модель с высоким навигационным коэффициентом (N > 7) эффективно управляет повторной кривой, которая соответствует кривой полета, более высокие навигационные константы в целом значительно снижают соответствие модели траекториям, на которых цель не была скрыта.
Выводы из наблюдений и моделирования
Holcocephala fusca способны избегать статических препятствий, перехватывая движущиеся цели. Комбинированная модель наведения (уравнение №3) демонстрирует, что уклонение от препятствий может быть результатом простых законов обратной связи, которые не требуют абсолютного знания расстояния, размера или скорости.
Более крупные хищные летающие животные могут действовать под более сложным управлением. Например, летучие мыши используют прогностические модели для отслеживания целей, а стрекозы, как полагают, выполняют перехватывающее планирование пути. В обоих случаях реактивные системы по-прежнему необходимы для обновления курса за счет ускорения цели. Ученые считают, что добавление внутренней модели цели обеспечивает решение для хищников с ограниченной маневренностью, стремящихся поймать более мелкую подвижную добычу.
Таким образом, у хищников с относительно большими размерами тела по сравнению с добычей, сенсомоторными задержками и ограниченной маневренностью можно ожидать увеличения зависимости от предсказания местоположения будущей цели. Однако внутренние модели внешнего мира требуют больших вычислительных ресурсов, и, если они будут ошибочными, их выходные прогнозы могут привести к неудаче захвата цели. В значительной степени полагаясь на реактивные стратегии, хищники с высокой маневренностью и высокой скоростью нейронных реакций могут избежать таких недостатков. Поскольку H. fusca является крайне малой мухой, ожидается что ее нейронные задержки также будут небольшими. Это позволяет H. fusca крайне быстро перехватывать добычу в полете.
В данном исследовании было показано, что маневрирование H. fusca во время охоты не объясняется исключительно pro-nav. Ученые считают, что, как и у людей, маневрирование этой маленькой мухи является результатом линейной комбинации нескольких систем управления.
Для более детального ознакомления рекомендую заглянуть в доклад ученых и дополнительные материалы к нему.
Эпилог
В рассмотренном нами сегодня труде ученые рассмотрели полет хищных мух вида H. fusca, дабы оценить их невероятную маневренность. Во время охоты H. fusca атакует добычу в полете, при этом облетает препятствия.
По мнению ученых, понимание того, как именно H. fusca (и другие летающие существа) реализуют маневрирование, перехват цели и другие аспекты полета, позволит усовершенствовать системы навигации, применяемые в авиастроении и робототехнике.
Немного рекламы
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас, оформив заказ или порекомендовав знакомым, облачные VPS для разработчиков от $4.99, уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps от $19 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле в дата-центре Maincubes Tier IV в Амстердаме? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5-2650 v4 стоимостью 9000 евро за копейки?
