Мы довольно долго молчали после прошлой публикации про предзаказ, так как всякие незначительные новости писать не хотелось. Сейчас вот появились новости которые, думаю, многие ждали.
КДПВ
Была частично переделана принципиальная схема устройства, Wi-Fi вынесен с основной платы на дополнительный модуль, что позволит в дальнейшем использовать различные коммуникационные чипсеты, добавлены ранее неиспользуемые выводы для специальных устройств (например, для подключения LCD) и многое другое.
Также отказались от применения в штатном модуле Wi-Fi чипа HDG104, заменили на более приятный Marvell 88W8686.
Производить будем в Китае/Гонконге. За помощь в организации производства отдельное спасибо хабраюзеру dzhe.
Мы ожидаем завершение производства и полного тестирования образцов нами к концу мая-началу июня. Если все пройдет успешно – запускаем основной тираж. По оптимистичному сценарию первые Виртурилки попадут к счастливым владельцам уже в июне.
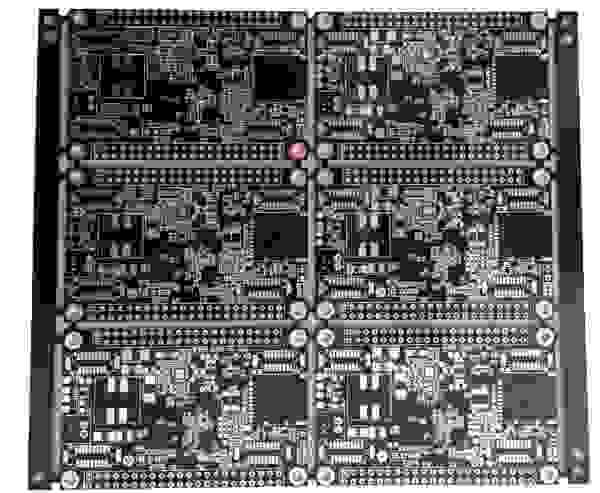
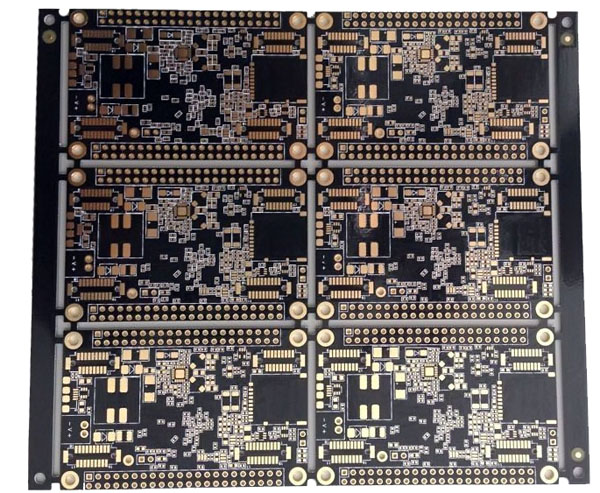
Спасибо китайским товарищам за фотографию (висит в начале топика), это печатки как раз из первой сотни. Чёрно-золотые, симпатишные. Скоро должны комплектуху напаять, тогда ещё обещают фотки выслать. Пока сами пощупать живьём не можем, так хоть на фотки полюбоваться.
Продажа предзаказов будет осуществляться через наш магазин Микрогонки. На данный момент магазин не осуществляет торговлю (такие машинки больше не производятся), чуть позже мы разместим там Виртурилку и аксессуары к ней.
Все люди, оставлявшие предзаказы, будут зарегистрированы в магазине микрогонки в качестве пользователей с особым статусом и получат соответствующее письмо с приглашением оформить заказ. На данный момент регистрация новых пользователей в нашем магазине отключена. Ранее регистрировавшиеся покупатели могут зайти на сайт, но, если они не оставляли предзаказ, права купить Виртурилку из первого тиража у них не будет.
Хотим отдельно упомянуть, что после первой статьи на хабре, еще до сбора предзаказов, к нам пришло много писем «где купить?» и «как заказать?». Всем написавшим после первой статьи инвайты на заказ будут высланы в первую очередь.
Регистрация пользователей и возможность оформления покупки появится сразу после того, как будет успешно закончено тестирование первой партии и запущен основной тираж. Мы рассчитываем на июнь месяц.
На первом этапе доставка будет осуществляться по России и странам СНГ. Вопрос по доставке в другие страны находится в процессе разработки.
Как обычно, задавайте вопросы в комментах. У кого нет аккаунта на Хабре но хочется задать вопрос — пишите комменты ко мне в бложик.
КДПВ
Итак:
Мы доработали конструкторскую документацию на тиражную версию Виртурилки
Была частично переделана принципиальная схема устройства, Wi-Fi вынесен с основной платы на дополнительный модуль, что позволит в дальнейшем использовать различные коммуникационные чипсеты, добавлены ранее неиспользуемые выводы для специальных устройств (например, для подключения LCD) и многое другое.
Также отказались от применения в штатном модуле Wi-Fi чипа HDG104, заменили на более приятный Marvell 88W8686.
Удалось окончательно определиться с цепочкой закупок, производства и доставки
Производить будем в Китае/Гонконге. За помощь в организации производства отдельное спасибо хабраюзеру dzhe.
Запущено производство первой части тиража размером 100 экземпляров
Мы ожидаем завершение производства и полного тестирования образцов нами к концу мая-началу июня. Если все пройдет успешно – запускаем основной тираж. По оптимистичному сценарию первые Виртурилки попадут к счастливым владельцам уже в июне.
Спасибо китайским товарищам за фотографию (висит в начале топика), это печатки как раз из первой сотни. Чёрно-золотые, симпатишные. Скоро должны комплектуху напаять, тогда ещё обещают фотки выслать. Пока сами пощупать живьём не можем, так хоть на фотки полюбоваться.
Как будет осуществляться продажа?
Где?
Продажа предзаказов будет осуществляться через наш магазин Микрогонки. На данный момент магазин не осуществляет торговлю (такие машинки больше не производятся), чуть позже мы разместим там Виртурилку и аксессуары к ней.
Как?
Все люди, оставлявшие предзаказы, будут зарегистрированы в магазине микрогонки в качестве пользователей с особым статусом и получат соответствующее письмо с приглашением оформить заказ. На данный момент регистрация новых пользователей в нашем магазине отключена. Ранее регистрировавшиеся покупатели могут зайти на сайт, но, если они не оставляли предзаказ, права купить Виртурилку из первого тиража у них не будет.
Хотим отдельно упомянуть, что после первой статьи на хабре, еще до сбора предзаказов, к нам пришло много писем «где купить?» и «как заказать?». Всем написавшим после первой статьи инвайты на заказ будут высланы в первую очередь.
Когда?
Регистрация пользователей и возможность оформления покупки появится сразу после того, как будет успешно закончено тестирование первой партии и запущен основной тираж. Мы рассчитываем на июнь месяц.
Куда будет осуществляться доставка?
На первом этапе доставка будет осуществляться по России и странам СНГ. Вопрос по доставке в другие страны находится в процессе разработки.
Как обычно, задавайте вопросы в комментах. У кого нет аккаунта на Хабре но хочется задать вопрос — пишите комменты ко мне в бложик.
