Comments 51
Испытания показали, что машинное зрение Tesla не уступает радарным датчикам.А можно ссылку на место, где утверждается именно это?
А то в том, что в ссылках в статье — говориться только про возврат рейтинга, и ровным счётом ничего про сами испытания.
Просто есть ситуации, в которых радары работают на ура а машинное зрение абсолютно бессильно.
Скорее надо утверждать, что «в наборе испытаний Страхового института дорожной безопасности они сработали на том же уровне» — т.е. есть проблемы с методологией испытаний, не включающей случаи, в которых именно радары необходимы.
Легко, достаточно вспомнить ситуации, когда очень тяжело различить глазами. Хотя бы вспомнить британскую аварию, когда из-за сильного тумана два водителя высунулись в окно, чтобы хоть что-то видеть. Столкнулись лбами. Насмерть, кстати.
В общем, вот кратенький список:
туман/снегопад, ночь.
туман при сильном солнце (бывает, бывает). Туман светится от солнца, так что различить сквозь него что-либо сложно.
сильный дождь, ночь. Очень мокрый асфальт, всё мокрое, и отражает свет твоих фар не назад, в глаза, а куда-то дальше, так что ну нифига не видно.
Свежий снег, не видно не только разметки, но и края дороги и кювета сбоку, он снегом присыпан вровень с дорогой. Даже днём...
в перечисленные моменты с туманом, дождём и снегом, когда глазами ничего не видно, радар не поможет, потому что в нём всегда видно ещё хуже
вообще неверно. Радар в силу того, что работает на других частотах, имеет бОльшую дальность обнаружения в тумане и дожде. И подскажет о препятствии или яме/кювете (задняя стенка которых хорошо отражает). Да, не даст картинку, но на уровне пусто/препятствие всё же сработает.
Да что там радар, ультразвуковой датчик парктроника вообще разрешение в один пиксель имеет, а ведь помогает. К примеру, неоднократно разворачивался на узких дорогах, ориентируясь именно на сигнал парктроника, чтобы не свалиться в кювет.
Это вы теоретически рассуждаете
Это я из личного опыта. На прошлой машине парктроник стоял простенький, на два датчика. Но какой-то такой удачный (в том числе по углу установки, видимо), что ловил ямы и кюветы сзади прекрасно. И я много раз пользовался этим, разворачиваясь на узких дорогах.
И да, парктроник был ультразвуковой. Кстати, на нынешней машине, поставив хорошую камеру заднего вида, парктроником практически перестал пользоваться :-)
"в ситуации, когда радар не поможет, машинное зрение будет не хуже, но тоже не поможет"
Замените в этой фразе "машинное зрение" на "езда вслепую", и ничего не изменится.
P.S. Я думал, что позицию MS Teams на пьедестале худшего редактора сообщений ничто не пошатнёт, и это по-прежнему так, но редактор комментов в новой версии Хабра – перспективный претендент. Буду следить за его успехами.
а никто и не собирается хаять теслу. Наоборот, мне их подход "лучше уж полноценно обработать один диапазон, чем нагрести их несколько и некорректно обрабатывать" нравится.
Но речь, мне казалось, зашла о большем уровне обобщения, может ли быть вообще польза от радара? Может, и как раз в описанных мной (и другими) ситуациях.
Это как противотуманки - они явно хуже освещают, чем основные фары, ехать 100 по ним нельзя. Но правильные (низкорасположенные и жёлтые) в специфических ситуациях класса "нифига не видно" вполне выручают.
Вы упоминанете много влаги - но ведь и на радар это тоже очень влияет (разумеется, зависит от частоты - есть даже специализированные атмосферные радары). Я не говорю про интерференцию между сигналами радаров (как от попутных, так и от встречных машин).
Ну и второй момент - у Элона Маска, как у главы SpaceX/StarLink - есть доступ к одним из наиболее совершенных и дешёвым фазированным антеннам (используемым в тарелках Starlink) - технологии аналогичные применяемым в радарах.
Вы упоминанете много влаги - но ведь и на радар это тоже очень влияет (разумеется, зависит от частоты - есть даже специализированные атмосферные радары).
В значительно меньшей степени, чем на зрение. Просто потому, что другая длина волны, и волна чаще огибает частицы в воздухе, чем отражается от них.
И отражение от мокрой поверхности будет больше. Прежде всего из-за той же большей длины волны и, соответственно, меньшего отражения от тонких плёнок.
Я не говорю про интерференцию между сигналами радаров (как от попутных, так и от встречных машин).
Ясно, что радар не должен работать в стиле 50-х годов. Современные умеют отсеять свой сигнал от чужого. Но, очевидно, что V2V в таких случаях гораздо, гораздо лучше, и картина, где 100500 автомобилей прутся по городу и каждый лупит восемью радарами (да хоть и лидарами) во все стороны - вполне маразматична.
Ну и второй момент
ещё раз напишу, что мне подход теслы хорошо обрабатывать один диапазон, наилучший, нравится больше, чем кое-как обрабатывать несколько. А то, что видимый - наилучший, следует ровно из того, что он видимый, не зря почти все живые существа видят именно в этом диапазоне. Да и расширить диапазон камеры в сторону ИК ничего не мешает, а алгоритмы обработки останутся.
Вы всё правильно пишете - я просто отметил, что разница не на порядок-два, а несколько раз, а то и десятки процентов.
>>Ясно, что радар не должен работать в стиле 50-х годов. Современные умеют отсеять свой сигнал от чужого.
Чтобы радар мог отсеять свой сигнал от чужого - нужно, чтобы радары разных марок были взаимно сертифицированы на предмет отсутствия интерференции. Плюс всякие страны ещё требуют свою сертификацию вместо американской, плюс разные диапазоны - и сейчас получается, что его просто приходится отключать на некторых рынках - т.е. это не только вопрос технологии. С камерами всё проще (кроме ряда стран, вроде Австрии - где ценят приватность) - они без сертификации будут работать везде.
Чтобы тесла не оттормаживалась перед каждым летящим кульком, нейронная сеть делит обнаруженные препятствия на классы, и некоторые типы препятствий игнорируются. Что, естественно, подверженно ошибкам и радар тут мог бы здорово помочь. Это не говоря уже о засветке камер или неконтрастности препятствия и т.д.
насколько я понимаю, слишком велика разница в объектах, формируемых на основе изображения с камер и объектов, формируемых системами обработки радаров/лидаров. Очень трудно полученные объекты сопоставить. Одни - выделенные из картинки объекты, которые потом расставляются по глубине, другие - точки по глубине, которые желательно собрать в объекты.
Получается две почти готовых для принятия решения карты объектов, которые не столько помогают друг другу, сколько конкурируют в решателе.
А так-то, на шарообразно-вакуумном уровне, чем больше датчиков на разных физических принципах (или хотя бы разных диапазонов по частоте) - тем лучше.
Что, естественно, подверженно ошибкам и радар тут мог бы здорово помочь.Маск как раз говорил, что это только мешает.
Ночь, встречные, бухой пешеход в чёрной одежде, идущий по твоей стороне дороги, которого с ближним светом и засветкой от встречных видно в лучшем случае метров с десяти. Для радара - идеальные условия работы, для камеры - невыполнимая задача.
И в каких же случаях? На ум приходит только одно - отсутствие освещение + неработающие фары
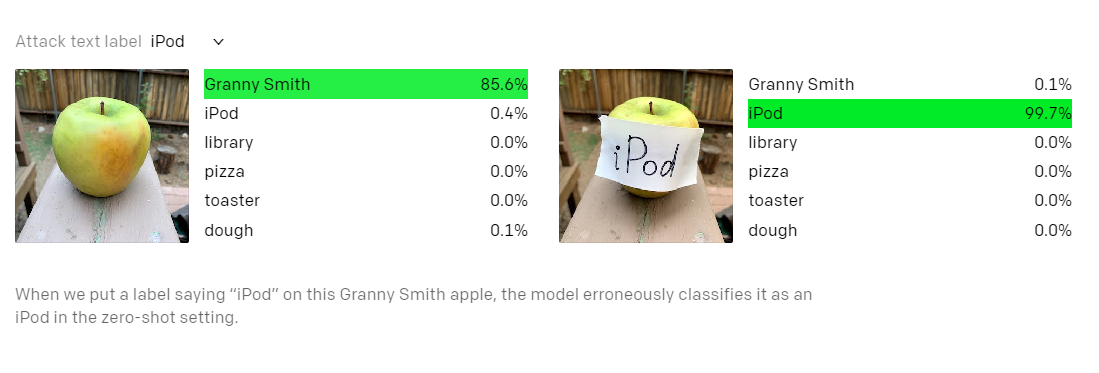
Например визуальный взлом машинного зрения, как-то спец раскрас, отражающие поверхности и прочие превосходно определяемые радаром поверхности, не говоря уже о намеренном вводе в заблуждение, как-то "это не утка, это собака" путём добавления пары штрихов невидимых для человека, но критичных для распознования машинным зрением.
Вопрос: зачем? И на сколько вероятно встретить такие «обманки» на дорогах общего пользования?

Вопрос: зачем? И на сколько вероятно встретить такие «обманки» на дорогах общего пользования?
Ну например в ряде стран Европы местами стали лепить вот такие зебры:

Вроде как бы повышает безопасность на определённых пешеходных переходах.
Так что вероятность встретить обманку очень велика.
Вспоминается анекдот про хакера и солонки.
И список боюсь будет расти
Пардон, а где расположены "глаза" Теслы? Грязь/пыль/осадки на видеокамеры никак не влияют?
Передняя камера под лобовым стеклом - дворниками чистятся, оптика так-себе, расстояние между крайними камерами (в модуле Tesla triple forward camera) могло бы быть и побольше. 1280*960 1.2МП, оптический стабилизатор изображения отсутствует. Про размер сенсора не нашел ничего.
Отсюда: https://www.systemplus.fr/reverse-costing-reports/triple-forward-camera-from-tesla-model-3/
Молодцы почти на том же уровне, но похоже у Тесла маловато опыта в распознавании изображения людей - фэйл почти по всем тестам - vehicle-to-pedestrian результаты где удалось избежать столкновения только с пересекающим взрослым на 18км/ч. Хотя и с радарами она не справлялась.
Вот так это делают те, кто в топе активной безопасности, у Subaru опыта побольше. Пока только последний Subaru EyeSight реагирует быстрее человека.
P.S. У нас возле дома ребенка толкнули машиной недавно - слежу за этим (самым сложным) тестом: выходящим на дорогу ребенком из-за препятствия.
Полазил по сайту IIHS. Кратко сравнение новой версии 2021 со старой (2017).
1. Предотвращение лобового столкновения: машина - машина.
Как новая так и старая версия не допустила столкновения. Тестировалось на скорости 20 км/ч (12mph) и 40 км/ч (25mph).
2. Предотвращение наезда на пешехода.
а) Ребенок пересекает траекторию движения авто непосредственно перед ней.
Новая версия затормазила авто на 10 и 12 mph (со скорости 12mph и 25mph, соответственно), что лучше предыдущей версии - 3 и 5 mph.
б) Взрослый пересекает траекторию движения авто непосредственно перед ней.
Новая версия справилась немного хуже. Для скорости 25mph она замедлила авто на 13mph, в отличие от предыдущей версии, когда авто не допускала столкновения с пешеходом. (нужно подчеркнуть, что для теста 12mph авто не допустила столкновения в случае новой и старой версии).
г) Взрослый пешеход движется параллельно тестируемому автомобилю.
Тестирование проводилось на скорости 40 км/ч и 60 км/ч. В обоих случаях старая версия справилась лучше. Для скорости 40км/ч старая версия успела полностью остановиться и не допустить столкноверия. Для скорости 60км/ч старая версия сбросила скорость до 5 км/ч (37 - 35 mph) в то время как новая сбросила скорость только до 20 км/ч (37 - 25 mph). В то же время нужно отметить, что новая версия раньше предупредила водителя об аварии (3.3 сек вместо 2.7).
К сожалению, для тестов проводимых IIHS не написано при каком освещении проводились тесты. Нужно будет ждать тестов EuNCAP, т.к. они проводят тесты как в условиях дневного так и ночного освещения.
Вообще, насколько я знаю, в большинстве систем автономного торможения на скорости меньше 30км/ч работает камера, а на скорости выше уже "подключается" радар. Вероятно, это потому, что радар "дальше видит".
В плане теста мне было бы интереснее посмотреть тест автоматического круиз контроля. Радар оценивает дорожную обстановку примерно на 200 метров и гораздо лучше справляется с определением взаимной скорости авто. Мне интересно насколько камера хуже справляется с этой задачей.
https://www.iihs.org/ratings/vehicle/tesla/model-3-4-door-sedan/2021#head-restraints-and-seats
https://www.iihs.org/ratings/vehicle/tesla/model-3-4-door-sedan/2018#front-crash-prevention-vehicle-to-pedestrian
Печально видеть столько провалов по предотвращению столкновения у такой раскрученной компании.
Не камера, а камеры - в Тесла их три вперёд смотрят, сколько реально работают - это мы никогда не узнаем.
У большинства машин радар эффективно работает на дистанции около 100м. Камера хорошо видит на 250м днем и те же 100-150м ночью на трассе без освещения. Правда габаритные огни машин видно на те же 250м. То что другие системы используют камеры только на маленькой скорости может быть вызвано тем что они используют маломощные процессоры которые не успевают обрабатывать информацию. У Теслы свой костомный комп на 30 гигафлоп который успевает.
Я смотрел объяснения Андрея Карпатного где он очень хорошо объяснил и показал на графиках почему они в Тесле отказались от радара. Если коротко то радар выдаёт очень нестабильные данные во многих ситуациях что ломает ИИ. Видео намного стабильнее и предсказуемо.
Вчера Маск пообещал довести все тесты безопасности до максимальных оценок. Я уверен что это у них получится, так что буду ждать апдейты. Это кстати очень классно когда все выпущенные теслы получают апдейты и становятся безопаснее. Я бы это тоже учитывал при оценках систем безопасности.
www.youtube.com/watch?v=KdrT-uI9H9c
Или видео где тесла сошла с ума едучи за грузовиком со светофорами. Может быть теслы уже перестали влетать под грузовики?
Это очень плохая идея убрать надежный радар и оставить ненадежное машинное зрение. Камера может не видеть в тумане или дожде. или при недостатчной освещенности. Распознает она лося на обочине ночью и на скорости? А если дальний выключен? А если лось не справа, а слева и ты в этот момент в процессе обгона? К самим алгоритмам тоже вопросы.
В условиях которые могут привести к гибели людей лучше использовать тупые, но надежные датчики, чем всякие маркетинговые игрушки и громкие лозунги.
Независимые испытания показали, что автопилот Tesla на машинном зрении не хуже радарного