Инженеры из Гарвардской школы инженерии и прикладных наук (Harvard School of Engineering and Applied Sciences, SEAS) разработали гибкие надувные приводы, которые позволят совершать запрограммированные движения без электроники, только с помощью давления воздуха.
Большинство современных надувных мягких приводов являются моностабильными, что означает, что им требуется постоянное давление для поддержания их надутого состояния. Если убрать давление, конструкция сдуется до своей единственной стабильной формы, поясняет соавтор исследования Дэвид Меланкон, бывший аспирант SEAS.
Чтобы обойти это ограничение, исследовательская группа под руководством Кати Бертольди, профессора прикладной механики в SEAS, использовала бистабильные блоки, то есть блоки, стабильные в двух различных конфигурациях и не требующие для этого постоянного давления.
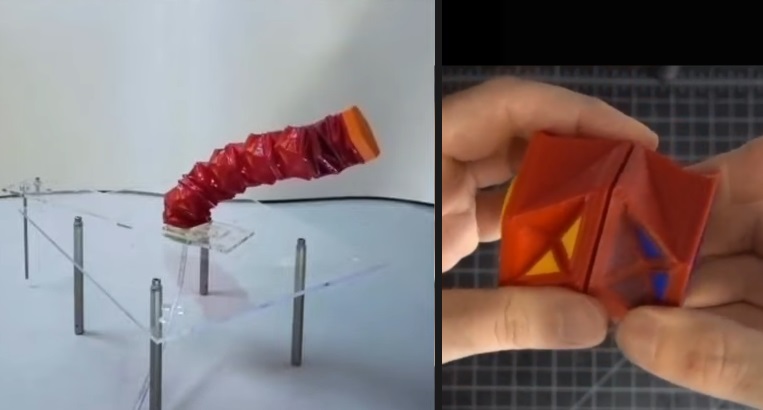
Команда вдохновилась мотивом Креслинга, классическим шаблоном оригами, представляющим собой сложенный из треугольников цилиндр со сменяющими друг друга рёбрами и впадинами. Чтобы добиться бистабильности, инженеры добавили в мотив оригами дефект — дополнительный узел в виде купола из четырёх треугольников, который открывается или закрывается под действием положительного или отрицательного давления.

«Всё работает просто. Мы надуваем структуру, выталкивая определённые ячейки, которые останутся выгнутыми, даже когда давление пропадёт. Затем, в этой новой конфигурации, мы можем использовать вакуум, чтобы заставить объект сжаться или скрутиться», — поясняет Антонио Элиа Форте, соавтор исследования.
Собирая различные модули и настраивая их геометрию так, чтобы они фиксировались при различном давлении, можно создавать сложные формы и режимы деформации, указывают инженеры. Разработчики построили привод с 12 различными модулями, напечатанными на 3D-принтере из ТПУ и ПЛА, способный выполнять восемь различных движений. Команда также создала алгоритм для определения оптимальной комбинации модулей для определённых движений. Разработка описана в Advanced Functional Materials.
Ранее американские инженеры создали крошечного робота-амфибию из полипропиленовой пленки, также сложенной по шаблону Креслинга. Конструкция позволила работу сжиматься и скручиваться, а в движение он приводится под воздействием магнитного поля. Робота испытали на полосе препятствий, частично заполненной водой, а также запустили его в желудок с вязкой жидкостью. Статья, посвящённая разработке, опубликована в журнале Nature Communications.
