Вдохновлённый серией постов «Теория радиоволн», я решился на аналогичный пост о системах спутникового позиционирования. Я работаю в структуре, которая занимается обеспечением функционирования системы ГЛОНАСС, поэтому постараюсь рассказать о ней и её конкурентах с несколько другой точки зрения. Пост будет именно об их устройстве, попутно хотелось бы развеять несколько мифов.
Постараюсь обойтись без выкладывания прописных истин и сведений, которые любой желающий может почерпнуть в википедии, но порой без них не обойтись, прошу отнестись с пониманием.
Все вы знаете, что такое глобальные навигационные спутниковые системы. Наиболее распространено мнение, что это некоторое количество спутников на околоземной орбите, которые излучают некий сигнал, что позволяет нам определять свои координаты в любой точке земного шара. На самом деле, любая ГНСС содержит как минимум три компонента:
Все остальные компоненты, такие как системы дифференциальных поправок не являются необходимыми, это лишь опции.
На данный момент полностью развернуты и общедоступны только две системы, GPS и ГЛОНАСС. Существует еще не менее четырёх ГНСС, находящихся в разных стадиях развертывания. Поскольку до конца ни одна из них не доведена, говорить мы про них не будем, хотя большая часть сказанного к ним тоже относится.
Подсистема НКА представляет собой некоторое количество спутников, согласованно движущихся по специально выбранным орбитам. Основное условие при выборе орбит — в любой точке планеты в любой момент времени должно быть видно не менее 4 спутников (почему именно четыре, будет объяснено ниже). На каждом из аппаратов установлены атомные часы — цезиевые, рубидиевые или их комбинация, в зависимости от модификации — синхронизированные с часами на центральном синхронизаторе системы. Синхронизированные — это не значит что они идут синфазно, это значит что известна разница хода часов. Именно центральный синхронизатор и хранит так называемую системную шкалу времени. Наш центральный синхронизатор находится в Подмосковье, американский в Подвашингтонье, что и неудивительно.
Каждый аппарат излучает несущее колебание в двух частотных диапазонах L1 и L2. Все НКА системы GPS излучают на общих частотах, 1575,42 МГц и 1227,60 МГц для L1 и L2 соответственно, а НКА системы ГЛОНАСС излучают на разнесённых частотах, называемых литерами (аппараты, находящиеся на противоположных точках орбиты излучают на одной литере). Разница между литерами составляет 562,5 кГц, для поддиапазона L1 и 437,5 кГц для L2, нулевая литера имеет частоты 1602 МГц и 1245 МГц соответственно.
Несущее колебание модулируется специальной кодовой последовательностью таким образом, что фаза кодового сигнала совпадает с показаниями часов спутника (если кому интересно — модуляция фазовая). В системе GPS каждый аппарат имеет уникальную кодовую последовательность, что позволяет различать их сигналы, несмотря на общую частоту. В ГЛОНАСС же используется частотное разделение, поэтому все аппараты имеют одинаковую кодовую последовательность. Дополнительно сигналы спутников модулируются навигационными сообщениями, которые содержат параметры полиномиальной математической модели движения спутника и модели смещения показаний спутниковых часов относительно системной шкалы времени.
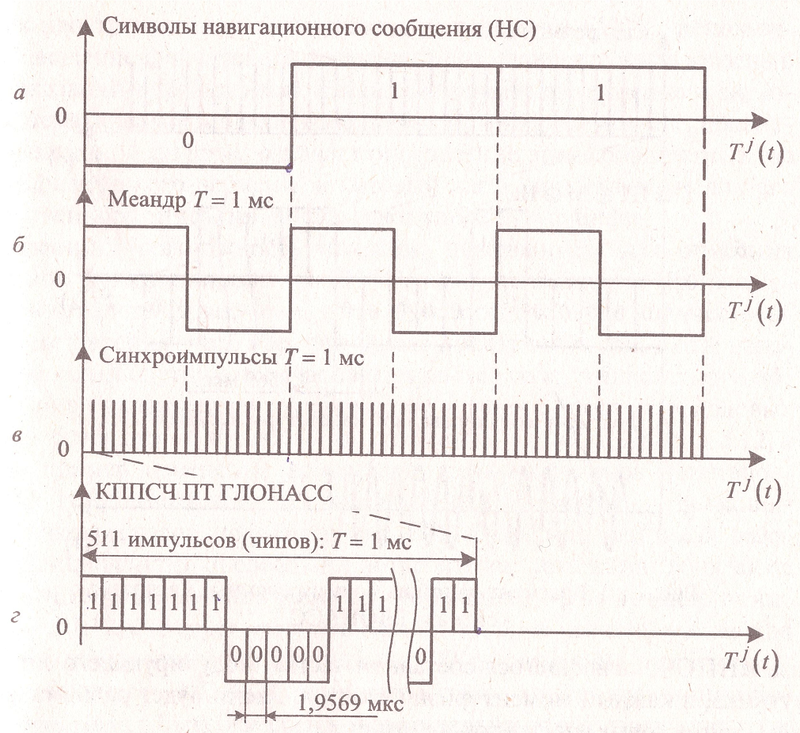
Структура сигнала космических аппаратов ГЛОНАСС
Навигационные сообщения также содержат параметры ионосферы (позволяет учитывать задержку сигналов в ионосфере), разницу между системной шкалой времени и мировой координированной шкалой времени и много еще всякой другой полезной информации. Упрощенно, подсистема НКА — это сеть синхронизированных, движущихся в пространстве часов, с известными в любой момент координатами.
Наземный комплекс управления — это сеть наземных станций, обеспечивающих определение параметров движения космических аппаратов, параметров хода их часов.На пунктах ведутся измерения параметров вращения планеты, параметров атмосферы, там уточняют характеристики гравитационного поля Земли и обеспечивают хранение мировой системы координат. Функционально в состав НКУ входит немалое количество научно-исследовательских учреждений и лабораторий. Ну и разумеется, именно наземный комплекс все эти данные обрабатывает и закладывает на аппараты, которые уже транслируют их в составе навигационного сообщения.
Наземный комплекс — это и базовые пункты с калиброванными приёмниками, и пункты федеральной астрономо-геодезической сети, и радиоинтерферометры со сверхдлинной базой, и лазерные дальномеры, и множетсво других интересных вещей. Вообще функции наземного комплекса очень разнообразны, его деятельность слишком обширна, чтобы включить её в эту статью. Если кого-то заинтересует — попробую написать статью и об этом.

Сеть станций наземного комплекса управления ГЛОНАСС
Ну и собственно навигационная аппаратура потребителей принимает и обрабатывает сигналы НКА системы. Получая сигнал от всех видимых аппаратов приёмник выполняет следующие функции (упрощенная схема):
Итак, мы имеем положение каждого аппарата, время распространения сигнала до каждого аппарата. А неизвестными являются наши координаты и разница шкалы времени приёмника с системной шкалой времени, то есть четыре неизвестных. Кстати, вопреки распространённому заблуждению, приёмник определяет координаты не в виде широты, долготы и высоты, а в виде x,y,z — координат в геоцентрической декартовой системе координат, связанной с центром масс планеты. Обусловлено это тем, что и координаты космических аппаратов определяются именно в этой системе координат. Существуют гостированные уравнения пересчета из параметров x,y,z, в B,L,H (широта, долгота, высота).
Понятно, что для определения четырёх неизвестных необходима система уравнений с четырьмя и более уравнениями. Вот поэтому нам и нужно четыре видимых аппарата. Существует возможность определения по трём аппаратам, для этого в систему вводится дополнительное уравнение земного эллипсоида (которое связывает x,y,z классическим уравнением эллипсоида). Но в этом случае и положение наше будет привязано именно к эллипсоиду, то есть о высоте говорить не приходится.
В любом случае результатом решения этой системы уравнений будут наши координаты и положение системной шкалы времени. О последнем иногда забывают, хотя передача точного времени задача не менее актуальная, чем определение координат. На данный момент, посредством ГНСС можно осуществить передачу точного времени в любую точку земного шара с точностью порядка десятка наносекунд, в особых случаях до единиц наносекунд. В этом конкурентов у них практически нет, все остальные системы передачи точного времени либо значительно дороже, либо значительно хуже. Все мировые лаборатории времени, все национальные эталоны времени и частоты (в том числе и наш) сличаются посредством ГНСС (разумеется, не только ГНСС), что и позволяет вести мировую координированную шкалу времени UTC, TAI и пр. Впрочем, передача времени и частоты, мировые шкалы времени — это отдельный разговор.
Разумеется это сильно упрощенная схема работы навигационных систем, про любой компонент можно рассказывать очень долго. Так что, если кого-то заинтересует, я готов углубиться в любой из аспектов работы ГНСС.
Сразу скажу, тут я просто рассмотрю наиболее распространённые вопросы и заблуждения, с которыми сталкиваюсь постоянно. Ну и постараюсь объяснить реальное состояние дел, в меру своей компетентности конечно.
Наиболее распространенный вопрос.
Начну с того, что ГЛОНАСС не во всём хуже GPS.
Например, в приполюсных областях группировка ГЛОНАСС обеспечивает лучшее покрытие, в силу более оптимальной конфигурации орбитальной группировки. Впрочем в приэкваториальных областях ситуация обратная по той же причине. Ноги растут из военного назначения обеих систем, а военные интересы Советского Союза и США были сконцентрированы именно в этих областях.
Кроме того, частотное разделение сигналов действительно улучшает помехоустойчивость системы ГЛОНАСС. Это же частотное разделение тянет за собой и множество проблем, но факт остаётся фактом — в случае вооружённого конфликта подавить нашу ГНСС будет сложнее.
Сама система непрерывно прогрессирует. Пусть не так быстро как хотелось бы, пусть это сопровождается коррупционными скандалами с какими-то астрономическими суммами, но весь мир признаёт, что ГЛОНАСС стабильно держится на дистанции четырёх-пятилетнего отставания от GPS, и разрыв не увеличивается. Кстати, не надо думать, что GPS сильно дешевле, он тоже стоит чудовищных денег, которые не всегда тратятся как следует.
Так почему же ГЛОНАСС отстаёт? Мало кто знает, что система ГЛОНАСС старше GPS на несколько лет (формально сама система моложе, но её прототипы появились раньше и сама отработка технологии началась раньше). Американцы разумеется наблюдали за её созданием, и создали свою, постаравшись учесть наши ошибки, которые другим способом предугадать было невозможно. Избежав наших системных ошибок, и не останавливая развитие (в отличие от нас, в девяностые вся наша спутниковая группировка едва не оказалась на дне Тихого океана) они превратились из отстающих в опережающих.
Как известно, НКА обеих систем излучают сигналы двух видов: стандартной точности (СТ-код для ГЛОНАСС, C/A для GPS) и высокой точности (аналогично ВТ-код и P/Y-код). СТ-код ГЛОНАСС излучается в обоих частотных диапазонах, а C/A код GPS только в частотном диапазоне L1 (за исключением нескольких НКА новой серии). Сигналы высокой точности излучаются в обоих частотных диапазонах. Различаются эти сигналы кодовой последовательностью, при этом сигналы с кодом высокой точности имеют более широкую полосу, что повышает точность и затрудняет подавление.
Традиционно сигналы высокой точности считаются военными, стандартные сигналы считаются гражданскими. Это только отчасти верно. Кодовая последовательность P-кода и ВТ-кода на данный момент открыта для широкого применения: американцы официально опубликовали свои кодовые последовательности, а заодно и наши (откуда они их узнали, оставим за кадром). Поэтому сейчас любой производитель совершенно свободно может создавать приёмники, принимающие военные сигналы (и создают, вся прецизионная аппаратура принимает все виды сигналов на всех частотах). Особенность в том, что в случае необходимости эти коды меняются по особому алгоритму, разумеется засекреченному. И вот после такой смены кодовых последовательностей только военная аппаратура сможет их принимать, поскольку в неё изначально этот самый алгоритм зашивается.
Более того, в случае необходимости на сигналы стандартной точности накладывается еще и кодирование, которое не мешает принимать эти сигналы, но не позволяет определять положение лучше пары сотен метров в принципе.
Все эти манипуляции могут производиться не глобально, а только над некоторым регионом земного шара, что продемонстрировали американцы во время войны в Ираке, лишив весь Ближний Восток нормального GPS. Аналогично поступали наши во время конфликта с Грузией, что особого резонанса не вызвало, поскольку пользователей ГЛОНАСС в Грузии не сыскать.
Что такое системные шкалы времени я уже рассказал. Так же упоминал мировую координированную шкалу времени UTC. Некоторые путают все эти понятия, я попробую отделить мух от котлет и объяснить в чем отличия. Мировая координированная шкала времени UTC — это аналитическая шкала времени (то есть она не имеет физической реализации, ведётся «на кончике пера»), которая высчитывается путём сличения шкал времени с эталонов времени и частоты всех мировых лабораторий времени. Соответственно шкалы самих эталонов в этих лабораториях именуются по названию страны или учреждения. Например шкала нашего национального эталона называется UTC(SU) (SU, потому что по этой же шкале живут практически все страны бывшего Советского Союза), шкала американского института стандартов NIST называется UTC(NIST). В американской военно-морской обсерватории USNO (самая мощная в мире лаборатории времени и частоты) ведётся шкала UTC(USNO), к которой подтягивают центральный синхронизатор системы GPS. Подтягивают, но разница между шкалами всё равно всегда есть, порядка нескольких наносекунд, и эта разница передаётся в навигационном сообщении спутников GPS. Таким образом, любой GPS приёмник может выдавать как системную шкалу времени, так и шкалу времени UTC(USNO). Аналогично обстоят дела для системной шкалы времени ГЛОНАСС и UTC(SU). Вот только вращение нашей планеты замедляется, и шкалу времени UTC раз в несколько лет корректируют на одну секунду. А системные шкалы времени не корректируются и разница между системными шкалами и мировым координированным временем на данный момент составляет 16 секунд.
Всем спасибо за внимание, надеюсь что было интересно.
Постараюсь обойтись без выкладывания прописных истин и сведений, которые любой желающий может почерпнуть в википедии, но порой без них не обойтись, прошу отнестись с пониманием.
Структура систем
Все вы знаете, что такое глобальные навигационные спутниковые системы. Наиболее распространено мнение, что это некоторое количество спутников на околоземной орбите, которые излучают некий сигнал, что позволяет нам определять свои координаты в любой точке земного шара. На самом деле, любая ГНСС содержит как минимум три компонента:
- подсистема навигационных космических аппаратов (НКА)
- подсистема наземного комплекса управления (НКУ)
- подсистема навигационной аппаратуры потребителей (НАП)
Все остальные компоненты, такие как системы дифференциальных поправок не являются необходимыми, это лишь опции.
На данный момент полностью развернуты и общедоступны только две системы, GPS и ГЛОНАСС. Существует еще не менее четырёх ГНСС, находящихся в разных стадиях развертывания. Поскольку до конца ни одна из них не доведена, говорить мы про них не будем, хотя большая часть сказанного к ним тоже относится.
Как это работает
Подсистема НКА представляет собой некоторое количество спутников, согласованно движущихся по специально выбранным орбитам. Основное условие при выборе орбит — в любой точке планеты в любой момент времени должно быть видно не менее 4 спутников (почему именно четыре, будет объяснено ниже). На каждом из аппаратов установлены атомные часы — цезиевые, рубидиевые или их комбинация, в зависимости от модификации — синхронизированные с часами на центральном синхронизаторе системы. Синхронизированные — это не значит что они идут синфазно, это значит что известна разница хода часов. Именно центральный синхронизатор и хранит так называемую системную шкалу времени. Наш центральный синхронизатор находится в Подмосковье, американский в Подвашингтонье, что и неудивительно.
Каждый аппарат излучает несущее колебание в двух частотных диапазонах L1 и L2. Все НКА системы GPS излучают на общих частотах, 1575,42 МГц и 1227,60 МГц для L1 и L2 соответственно, а НКА системы ГЛОНАСС излучают на разнесённых частотах, называемых литерами (аппараты, находящиеся на противоположных точках орбиты излучают на одной литере). Разница между литерами составляет 562,5 кГц, для поддиапазона L1 и 437,5 кГц для L2, нулевая литера имеет частоты 1602 МГц и 1245 МГц соответственно.
Несущее колебание модулируется специальной кодовой последовательностью таким образом, что фаза кодового сигнала совпадает с показаниями часов спутника (если кому интересно — модуляция фазовая). В системе GPS каждый аппарат имеет уникальную кодовую последовательность, что позволяет различать их сигналы, несмотря на общую частоту. В ГЛОНАСС же используется частотное разделение, поэтому все аппараты имеют одинаковую кодовую последовательность. Дополнительно сигналы спутников модулируются навигационными сообщениями, которые содержат параметры полиномиальной математической модели движения спутника и модели смещения показаний спутниковых часов относительно системной шкалы времени.

Структура сигнала космических аппаратов ГЛОНАСС
Навигационные сообщения также содержат параметры ионосферы (позволяет учитывать задержку сигналов в ионосфере), разницу между системной шкалой времени и мировой координированной шкалой времени и много еще всякой другой полезной информации. Упрощенно, подсистема НКА — это сеть синхронизированных, движущихся в пространстве часов, с известными в любой момент координатами.
Наземный комплекс управления — это сеть наземных станций, обеспечивающих определение параметров движения космических аппаратов, параметров хода их часов.На пунктах ведутся измерения параметров вращения планеты, параметров атмосферы, там уточняют характеристики гравитационного поля Земли и обеспечивают хранение мировой системы координат. Функционально в состав НКУ входит немалое количество научно-исследовательских учреждений и лабораторий. Ну и разумеется, именно наземный комплекс все эти данные обрабатывает и закладывает на аппараты, которые уже транслируют их в составе навигационного сообщения.
Наземный комплекс — это и базовые пункты с калиброванными приёмниками, и пункты федеральной астрономо-геодезической сети, и радиоинтерферометры со сверхдлинной базой, и лазерные дальномеры, и множетсво других интересных вещей. Вообще функции наземного комплекса очень разнообразны, его деятельность слишком обширна, чтобы включить её в эту статью. Если кого-то заинтересует — попробую написать статью и об этом.

Сеть станций наземного комплекса управления ГЛОНАСС
Ну и собственно навигационная аппаратура потребителей принимает и обрабатывает сигналы НКА системы. Получая сигнал от всех видимых аппаратов приёмник выполняет следующие функции (упрощенная схема):
- разделение сигнала от каждого спутника (по кодовой последовательности для GPS и по частоте для ГЛОНАСС).
- определение показаний часов НКА на момент излучения принятого сигнала путём обработки кодовой последовательности. Как упоминалось выше, кодовая последовательность синхронизирована с бортовыми часами аппарата.
- приём навигационного сообщения. Это даст следующие данные: положение аппарата и разницу хода его часов и системной шкалы времени. Мы уже можем определить момент излучения сигнала спутником в системной шкале времени.
- определение показаний собственных часов приёмника в момент приёма сигнала от спутников. Таким образом, мы определяем время распространения сигнала от спутника до приёмника. Но это время мы определим с погрешностью, равной разнице хода часов приёмника и системной шкалы времени. Очевидно, что эта погрешность будет одинакова для всех аппаратов.
Итак, мы имеем положение каждого аппарата, время распространения сигнала до каждого аппарата. А неизвестными являются наши координаты и разница шкалы времени приёмника с системной шкалой времени, то есть четыре неизвестных. Кстати, вопреки распространённому заблуждению, приёмник определяет координаты не в виде широты, долготы и высоты, а в виде x,y,z — координат в геоцентрической декартовой системе координат, связанной с центром масс планеты. Обусловлено это тем, что и координаты космических аппаратов определяются именно в этой системе координат. Существуют гостированные уравнения пересчета из параметров x,y,z, в B,L,H (широта, долгота, высота).
Понятно, что для определения четырёх неизвестных необходима система уравнений с четырьмя и более уравнениями. Вот поэтому нам и нужно четыре видимых аппарата. Существует возможность определения по трём аппаратам, для этого в систему вводится дополнительное уравнение земного эллипсоида (которое связывает x,y,z классическим уравнением эллипсоида). Но в этом случае и положение наше будет привязано именно к эллипсоиду, то есть о высоте говорить не приходится.
В любом случае результатом решения этой системы уравнений будут наши координаты и положение системной шкалы времени. О последнем иногда забывают, хотя передача точного времени задача не менее актуальная, чем определение координат. На данный момент, посредством ГНСС можно осуществить передачу точного времени в любую точку земного шара с точностью порядка десятка наносекунд, в особых случаях до единиц наносекунд. В этом конкурентов у них практически нет, все остальные системы передачи точного времени либо значительно дороже, либо значительно хуже. Все мировые лаборатории времени, все национальные эталоны времени и частоты (в том числе и наш) сличаются посредством ГНСС (разумеется, не только ГНСС), что и позволяет вести мировую координированную шкалу времени UTC, TAI и пр. Впрочем, передача времени и частоты, мировые шкалы времени — это отдельный разговор.
Разумеется это сильно упрощенная схема работы навигационных систем, про любой компонент можно рассказывать очень долго. Так что, если кого-то заинтересует, я готов углубиться в любой из аспектов работы ГНСС.
Срыв покровов
Сразу скажу, тут я просто рассмотрю наиболее распространённые вопросы и заблуждения, с которыми сталкиваюсь постоянно. Ну и постараюсь объяснить реальное состояние дел, в меру своей компетентности конечно.
Почему ГЛОНАСС такой плохой?
Наиболее распространенный вопрос.
Начну с того, что ГЛОНАСС не во всём хуже GPS.
Например, в приполюсных областях группировка ГЛОНАСС обеспечивает лучшее покрытие, в силу более оптимальной конфигурации орбитальной группировки. Впрочем в приэкваториальных областях ситуация обратная по той же причине. Ноги растут из военного назначения обеих систем, а военные интересы Советского Союза и США были сконцентрированы именно в этих областях.
Кроме того, частотное разделение сигналов действительно улучшает помехоустойчивость системы ГЛОНАСС. Это же частотное разделение тянет за собой и множество проблем, но факт остаётся фактом — в случае вооружённого конфликта подавить нашу ГНСС будет сложнее.
Сама система непрерывно прогрессирует. Пусть не так быстро как хотелось бы, пусть это сопровождается коррупционными скандалами с какими-то астрономическими суммами, но весь мир признаёт, что ГЛОНАСС стабильно держится на дистанции четырёх-пятилетнего отставания от GPS, и разрыв не увеличивается. Кстати, не надо думать, что GPS сильно дешевле, он тоже стоит чудовищных денег, которые не всегда тратятся как следует.
Так почему же ГЛОНАСС отстаёт? Мало кто знает, что система ГЛОНАСС старше GPS на несколько лет (формально сама система моложе, но её прототипы появились раньше и сама отработка технологии началась раньше). Американцы разумеется наблюдали за её созданием, и создали свою, постаравшись учесть наши ошибки, которые другим способом предугадать было невозможно. Избежав наших системных ошибок, и не останавливая развитие (в отличие от нас, в девяностые вся наша спутниковая группировка едва не оказалась на дне Тихого океана) они превратились из отстающих в опережающих.
Военные коды
Как известно, НКА обеих систем излучают сигналы двух видов: стандартной точности (СТ-код для ГЛОНАСС, C/A для GPS) и высокой точности (аналогично ВТ-код и P/Y-код). СТ-код ГЛОНАСС излучается в обоих частотных диапазонах, а C/A код GPS только в частотном диапазоне L1 (за исключением нескольких НКА новой серии). Сигналы высокой точности излучаются в обоих частотных диапазонах. Различаются эти сигналы кодовой последовательностью, при этом сигналы с кодом высокой точности имеют более широкую полосу, что повышает точность и затрудняет подавление.
Традиционно сигналы высокой точности считаются военными, стандартные сигналы считаются гражданскими. Это только отчасти верно. Кодовая последовательность P-кода и ВТ-кода на данный момент открыта для широкого применения: американцы официально опубликовали свои кодовые последовательности, а заодно и наши (откуда они их узнали, оставим за кадром). Поэтому сейчас любой производитель совершенно свободно может создавать приёмники, принимающие военные сигналы (и создают, вся прецизионная аппаратура принимает все виды сигналов на всех частотах). Особенность в том, что в случае необходимости эти коды меняются по особому алгоритму, разумеется засекреченному. И вот после такой смены кодовых последовательностей только военная аппаратура сможет их принимать, поскольку в неё изначально этот самый алгоритм зашивается.
Более того, в случае необходимости на сигналы стандартной точности накладывается еще и кодирование, которое не мешает принимать эти сигналы, но не позволяет определять положение лучше пары сотен метров в принципе.
Все эти манипуляции могут производиться не глобально, а только над некоторым регионом земного шара, что продемонстрировали американцы во время войны в Ираке, лишив весь Ближний Восток нормального GPS. Аналогично поступали наши во время конфликта с Грузией, что особого резонанса не вызвало, поскольку пользователей ГЛОНАСС в Грузии не сыскать.
Шкалы GPS, ГЛОНАСС, UTC
Что такое системные шкалы времени я уже рассказал. Так же упоминал мировую координированную шкалу времени UTC. Некоторые путают все эти понятия, я попробую отделить мух от котлет и объяснить в чем отличия. Мировая координированная шкала времени UTC — это аналитическая шкала времени (то есть она не имеет физической реализации, ведётся «на кончике пера»), которая высчитывается путём сличения шкал времени с эталонов времени и частоты всех мировых лабораторий времени. Соответственно шкалы самих эталонов в этих лабораториях именуются по названию страны или учреждения. Например шкала нашего национального эталона называется UTC(SU) (SU, потому что по этой же шкале живут практически все страны бывшего Советского Союза), шкала американского института стандартов NIST называется UTC(NIST). В американской военно-морской обсерватории USNO (самая мощная в мире лаборатории времени и частоты) ведётся шкала UTC(USNO), к которой подтягивают центральный синхронизатор системы GPS. Подтягивают, но разница между шкалами всё равно всегда есть, порядка нескольких наносекунд, и эта разница передаётся в навигационном сообщении спутников GPS. Таким образом, любой GPS приёмник может выдавать как системную шкалу времени, так и шкалу времени UTC(USNO). Аналогично обстоят дела для системной шкалы времени ГЛОНАСС и UTC(SU). Вот только вращение нашей планеты замедляется, и шкалу времени UTC раз в несколько лет корректируют на одну секунду. А системные шкалы времени не корректируются и разница между системными шкалами и мировым координированным временем на данный момент составляет 16 секунд.
Всем спасибо за внимание, надеюсь что было интересно.
