Comments 41
Альбатрос все реальней? :)

В одном узкоспециализированном блоге недавно было обсуждение этого концепта. В самом посте и особенно в комментах.
Довольно интересно и с тех.подробностями: strangernn.livejournal.com/1171531.html
Довольно интересно и с тех.подробностями: strangernn.livejournal.com/1171531.html
Пройдя по ссылке не нашел никаких адекватных технических подробностей кроме догадок пользователей и местами весьма бредовых утверждений.
Ну, все технические подробности можно по фото найти. Винты — полтора метра где-то. 18 моторов, статическая тяга должна быть в районе 20-30 килограмм на мотор (чтобы мог поднимать аппарат с полным весом до 200-300 кило с 50% запасом по тяге, необходимой для маневренности коптера и резервирования). Аппарат сам будет весить в районе сотни-полутора, наверное (моторы — килограмма по три), если карбон применять.
Ну собственно уже расчеты кривоваты. Вес взрослого человека легко доходит до 100кг. Два человека=200кг. Вес аппарата 150кг это самые оптимистичные расчеты, но даже если и так то выходит 350кг. 50% запас по тяге следовательно тяга 350*2=700кг. Тяга для каждого двигателя 700/18=38 кг. Дальше.
Моторы весом 3.5кг тянут винты размерностью около 30-35 дюймов при этом их тяга около 20-30 кг. Это касательно сравнительно высокооборотистых. Высокомоментные тянут винты побольше но требуют большего напряжения. Для тех винтов что на этом коптере мотор будет весить ближе к 10 кг. итого одних моторов выйдет на 180 кг. т.е. все предыдущие расчеты будут неверны. Поэтому и хочется данных от самих разработчиков.
Моторы весом 3.5кг тянут винты размерностью около 30-35 дюймов при этом их тяга около 20-30 кг. Это касательно сравнительно высокооборотистых. Высокомоментные тянут винты побольше но требуют большего напряжения. Для тех винтов что на этом коптере мотор будет весить ближе к 10 кг. итого одних моторов выйдет на 180 кг. т.е. все предыдущие расчеты будут неверны. Поэтому и хочется данных от самих разработчиков.
Допустимым считается один человек = 70 кг. И электродвигатели тем и хороши, что позволяют выбирать KV (число оборотов на вольт), а напряжение — вообще любое можно сделать, с шагом в 3.7 вольта. Полутораметровые винты надо вращать со скоростью от 1100 до 1500 оборотов в минуту, получая мощность моторов 1500..4500 ватт. То есть, 3.5 кило на мотор — это даже перебор. Батарей, похоже, придется взять побольше, килограмм на 100.
70 кг на человека? не маловато ли? Т.е. если я захочу на такой штуке полетать (90 кг +-) то второй пассажир должен быть не больше 50 кг. Т.е. разве что хрупкую девушку с собой на борт можно будет взять. Посмотрите сколько едят двигатели весом 3 кило. Для тяги в 30 кг примерно они едят около 15кВт. а 1.5 кВт это навскидку около 5 кг тяги. Теперь считаем, 18 двигателей будут давать тягу 540 кг.
Из этих 540 кг минус 140кг на пассажиров = 400кг. минус 50 кг на двигатели = 350 кг. Минус фантастические 150 кг на корпус = 200 кг.
Минус электроника и прочий бред кг 10 в лучшем случае итого 190 кг останется на батареи. Потребление 18 двигателей будет 270кВт.
Сколько хватит 190 кг батарей на полет?
Из этих 540 кг минус 140кг на пассажиров = 400кг. минус 50 кг на двигатели = 350 кг. Минус фантастические 150 кг на корпус = 200 кг.
Минус электроника и прочий бред кг 10 в лучшем случае итого 190 кг останется на батареи. Потребление 18 двигателей будет 270кВт.
Сколько хватит 190 кг батарей на полет?
1.5 киловатта — это будет около 20 кг тяги. Диаметр винтов в расчет надо принимать.
Если считать как вы говорите то все бы сейчас летали на вертолетах с пятиметровыми винтами питающимися от пальчиковых батареек но к сожалению все не так просто. Помимо этого надо еще учитывать квадратичную зависимость мощности от радиуса винтов. При 1.5кВт 20 кило выдаст только винт с профилем крыла как в квадракоптере на мускульной тяге в посте ниже, в остальных случаях 1.5 кВт выдаст около 5 кг. Основываюсь на личном опыте проверки тяги 320kv двигателя с 17 дюймовым винтом с шагом 4 дюйма.
Да возьмите любой калькулятор static thrust и посчитайте. Вот, примерный расчет (редуктор включил потому что не нашел моторов на 40-80KV): 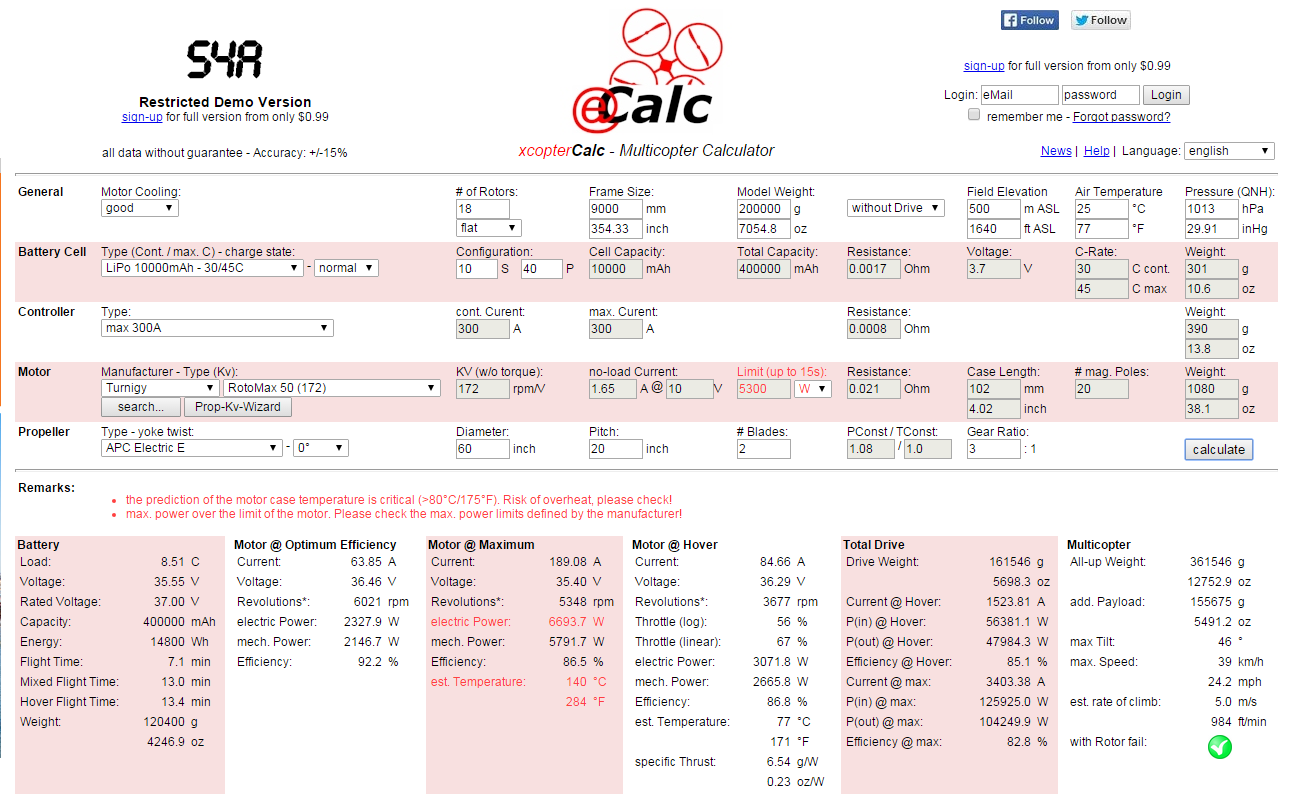

Ожидал увидеть здесь этот шедевр с морем багов.
1. Как у вас занятно образовался несуществующий непросчитанный проп 60х20, так считать нельзя
2. Посчитайте хотябы вес проводов для одного двигателя (три фазы) на 60А и умножте на 18.
3. Двигатель с редуктором не одно и то же что и прямой привод, так считать нельзя, добавьте к расчетам вес редуктора для таких габаритов и нагрузок и получите агрегат в два раза тяжелее.
4. Суммарный вес двух человек 140кг, вес батарей 120кг, в сумме будет 260, корпус будет в лучшем случае сотню весить, уже 360, eCalc насчитал суммарный вес 360кг, а где двигатели, где электроника, один нормальный контроллер на 200А будет весить 1кг в лучшем случае, где адекватный вес пропов, где полетный контроллер, органы управления, средства связи и т.д.,
5. Ну и самое главное, время полета в режиме висения 13 минут… занавес. Причем это время не получится масштабировать запасом аккумуляторов. Больше аккумуляторов=больше вес=мощнее моторы=больше потребление.
P.S. все эти eCalc и прочие можно использовать только для игрушек составленных из того что уже сотню раз измерено.
1. Как у вас занятно образовался несуществующий непросчитанный проп 60х20, так считать нельзя
2. Посчитайте хотябы вес проводов для одного двигателя (три фазы) на 60А и умножте на 18.
3. Двигатель с редуктором не одно и то же что и прямой привод, так считать нельзя, добавьте к расчетам вес редуктора для таких габаритов и нагрузок и получите агрегат в два раза тяжелее.
4. Суммарный вес двух человек 140кг, вес батарей 120кг, в сумме будет 260, корпус будет в лучшем случае сотню весить, уже 360, eCalc насчитал суммарный вес 360кг, а где двигатели, где электроника, один нормальный контроллер на 200А будет весить 1кг в лучшем случае, где адекватный вес пропов, где полетный контроллер, органы управления, средства связи и т.д.,
5. Ну и самое главное, время полета в режиме висения 13 минут… занавес. Причем это время не получится масштабировать запасом аккумуляторов. Больше аккумуляторов=больше вес=мощнее моторы=больше потребление.
P.S. все эти eCalc и прочие можно использовать только для игрушек составленных из того что уже сотню раз измерено.
1. Это я еще не поставил более реалистичный 60x40, который по ecalc-у дает тяги процентов на 20 больше…
2. Килограмм 20-30. Оно, кстати, в вес добавило.
3. Редуктора не будет, если найти мотор подходящий (у ecalc-а база ограничена)
4. Регуляторы весят раза в два-три меньше, ecalc тут довольно близок к истине
5. Там запас в 155 кг, если не заметили (до throttle 80% для hover) — батареи добавят несколько минут полетного времени. Как бы товарищи большее время и не обещают, собственно.
Кстати, если взять батареи попроще (на меньший разряд) — они и весить будут на 10-30% меньше.
2. Килограмм 20-30. Оно, кстати, в вес добавило.
3. Редуктора не будет, если найти мотор подходящий (у ecalc-а база ограничена)
4. Регуляторы весят раза в два-три меньше, ecalc тут довольно близок к истине
5. Там запас в 155 кг, если не заметили (до throttle 80% для hover) — батареи добавят несколько минут полетного времени. Как бы товарищи большее время и не обещают, собственно.
Кстати, если взять батареи попроще (на меньший разряд) — они и весить будут на 10-30% меньше.
1. Вы не поняли, нельзя просто так брать и менять шаг винта, винт 60х40 даст больше тяги только если поставить мощнее(соответственно и тяжелее и более прожорливее) мотор т.к. сопротивление воздуха значительно вырастет. и винты с таким шагом используются в самолетах, а не вертолетах/коптерах так как их тяга меньше зависит от скорости аппарата, но при этом они менее эффективны в режиме висения. Значительно менее эффективны.
2. Не добавило, модель 200кг, 120кг акки, 18кг моторы, 7кг контроллеры, уже 345 при полетном 361 осталось 16 кг. Вопрос — два пассажира 140кг, у вас корпус будет 60кг весить?
3. Подходящий мотор будет весить значительно больше нежели указанный 1 кг. Мотор 100KV Turnigy Multistar большого диаметра весит 1кг для винтов 30х8. Отмасштабируйте. Винт 60 дюймов в два раза большего диаметра потребует в 4 раза большей мощности при том же шаге в 8 дюймов. Вы считали для 20 т.е. еще больше мощности потребуется.
4. Я бы не сел в такой аппарат в котором используются регуляторы в два три раза меньше. Почитайте про статистику их отказа. Turnigy Fatboy V2 300A например весит 0.4кг и то его при подключении надо сначала замыкать через резисторы дабы не было бабаха от огромных токов в момент зарядки конденсаторов. Вы же не будете это делать для 18 моторов, т.е. нужна определенная доработка плюс мониторинг плюс резервирование по хорошему плюс определенного уровня защиты, мы же все таки не мешки с картошкой возить собираемся.
5. Этот запас-псевдозапас. В пункте два отписал, корпус будет весить больше 60кг, провода не учтены, множество дополнительной электроники не учтено. Весь запас сожрется в итоге двигатели будут работать на пределе, есть еще больше энергии и время висения будет еще меньше. Поставите больше аккумуляторов увеличится вес и двигатели вобще сгорят т. е. надо ставить двигатели мощнее, поставите двигатели мощнее потребуются другие винты и больше аккумуляторов и т.д., Это не машина где +- пару сотен кг роли не играют.
80% запаса тяги для коптера это ни о чем. Висение должно достигаться на 50% примерно т.к. часть запаса уходит на стабилизацию, часть на подъем, часть на резерв в случае отказа.
2. Не добавило, модель 200кг, 120кг акки, 18кг моторы, 7кг контроллеры, уже 345 при полетном 361 осталось 16 кг. Вопрос — два пассажира 140кг, у вас корпус будет 60кг весить?
3. Подходящий мотор будет весить значительно больше нежели указанный 1 кг. Мотор 100KV Turnigy Multistar большого диаметра весит 1кг для винтов 30х8. Отмасштабируйте. Винт 60 дюймов в два раза большего диаметра потребует в 4 раза большей мощности при том же шаге в 8 дюймов. Вы считали для 20 т.е. еще больше мощности потребуется.
4. Я бы не сел в такой аппарат в котором используются регуляторы в два три раза меньше. Почитайте про статистику их отказа. Turnigy Fatboy V2 300A например весит 0.4кг и то его при подключении надо сначала замыкать через резисторы дабы не было бабаха от огромных токов в момент зарядки конденсаторов. Вы же не будете это делать для 18 моторов, т.е. нужна определенная доработка плюс мониторинг плюс резервирование по хорошему плюс определенного уровня защиты, мы же все таки не мешки с картошкой возить собираемся.
5. Этот запас-псевдозапас. В пункте два отписал, корпус будет весить больше 60кг, провода не учтены, множество дополнительной электроники не учтено. Весь запас сожрется в итоге двигатели будут работать на пределе, есть еще больше энергии и время висения будет еще меньше. Поставите больше аккумуляторов увеличится вес и двигатели вобще сгорят т. е. надо ставить двигатели мощнее, поставите двигатели мощнее потребуются другие винты и больше аккумуляторов и т.д., Это не машина где +- пару сотен кг роли не играют.
80% запаса тяги для коптера это ни о чем. Висение должно достигаться на 50% примерно т.к. часть запаса уходит на стабилизацию, часть на подъем, часть на резерв в случае отказа.
1. Значительно-незначительно, но тяга растет, а эффективность — падает «незначительно». Реального опыта с такими здоровыми винтами не имел, но ecalc-у не доверять в этом вопросе — смысла не вижу. Ошибается, да, но не на десятки процентов.
2. Алюминиевый прямоугольный профиль 50x20x2 (под рукой просто оказался из того, что выдержит примерную нагрузку) — где-то грамм 700-800 на метр. Размеры перемычек можно по фото прикинуть. Будет весить как раз килограмм 60, если его даже из алюминия, а не карбона (раза в два-три легче) собрать.
3. Вы опять забываете, что винт большего диаметра требует меньшей мощности мотора для той же тяги.
4. Резервирование там хорошее, а подключение батарей — вопрос как бы отдельный и легко решаемый (теми же резисторами, или постепенным увеличением напряжения), к качеству контроллеров скорости — вообще никакого отношения.
5. Я как бы и не претендую на то, чтобы спроектировать такой же аппарат. Ребята там не зря просят $340000 — думаю, они там перебрали многие варианты и облегчили все что можно. Мне хватает примерной оценки.
если летает на 80%, то сохраняется приличная управляемость и скорость (реальные проблемы начнутся на 90-95, в зависимости от центровки аппарата и прочего).
2. Алюминиевый прямоугольный профиль 50x20x2 (под рукой просто оказался из того, что выдержит примерную нагрузку) — где-то грамм 700-800 на метр. Размеры перемычек можно по фото прикинуть. Будет весить как раз килограмм 60, если его даже из алюминия, а не карбона (раза в два-три легче) собрать.
3. Вы опять забываете, что винт большего диаметра требует меньшей мощности мотора для той же тяги.
4. Резервирование там хорошее, а подключение батарей — вопрос как бы отдельный и легко решаемый (теми же резисторами, или постепенным увеличением напряжения), к качеству контроллеров скорости — вообще никакого отношения.
5. Я как бы и не претендую на то, чтобы спроектировать такой же аппарат. Ребята там не зря просят $340000 — думаю, они там перебрали многие варианты и облегчили все что можно. Мне хватает примерной оценки.
если летает на 80%, то сохраняется приличная управляемость и скорость (реальные проблемы начнутся на 90-95, в зависимости от центровки аппарата и прочего).
1. Как раз все с точностью до наоборот. Пару двигатель-винт подбирают оптимально. Если поставить на двигатель после подбора винт с бОльшим шагом то возрастет нагрузка на двигатель, двигатель будет греться, при этом тяга практически не меняется и более того, часто она меняется в худшую сторону, да еще и одновременно при повышении нагрузки возрастает ток а следовательно и потребление т.е. значительно падает эффективность двигателя. Если двигатель нагреется слишком сильно это будет фатальным для магнитов. Если поставить винт со значительно бОльшим шагом то двигатель сгорит. Это же относится и к диаметру винтов. eCalc об этом мало что знает если в базе нет существующего винта/двигателя поэтому отбалды вбивать параметры прямой путь к ошибкам овер 100500.
2. Мне что то подсказывает что кабина сделана не из алюминиевого профиля толщиной 2мм. Одно только стекло пусть даже орг сколько будет весить…
3. Описано в первом пункте.
4. «Хорошее» резервирование ни о чем не говорит. Подключение батарей через резисторы когда каждый ватт на счету? вы должно быть шутите? Импульсный преобразователь с ограничением тока. Погуглите как выглядит качественная силовая электроника и как выглядят китайские преобразователи для моделей на 400г.
5. На 80% оно сможет только висеть в ангаре, особенно при том весе который вы сказали, небольшое шевеление, смещение пилота и центр тяжести меняется, полезная нагрузка может варьироваться грубо говоря от 45 до 140кг. При маленькой нагрузке зад аппарата будет перевешивать, придется снижать тягу на передних двигателях и повышать на задних, при большой нагрузке наоборот. А теперь при этом надо еще иметь возможность наклоняться вперед назад, влево вправо и стабилизировать аппарат от порывов ветра, воздушных потоков от винтов и прочих радостей, обороты при этом значительно могут меняться. Плюс должен быть некоторый запас на случай неполадок, например выхода из строя двигателей, птиц еще никто не отменял. В противном случае это будет летающий гроб. Если заложить хотябы возможность выхода из строя одного двигателя то при этом часть двигателей должна повысить обороты а часть снизить, при этом суммарная тяга меньшего числа двигателей должна остаться прежней. Т.е. на один только отказ должен быть запас минимум чуть больше 5%. Сложите все это вместе и получите как раз около 50%.
Именно поэтому мне и интересны реальные технические подробности и цифры про этот аппарат а не догадки в левом бложке.
2. Мне что то подсказывает что кабина сделана не из алюминиевого профиля толщиной 2мм. Одно только стекло пусть даже орг сколько будет весить…
3. Описано в первом пункте.
4. «Хорошее» резервирование ни о чем не говорит. Подключение батарей через резисторы когда каждый ватт на счету? вы должно быть шутите? Импульсный преобразователь с ограничением тока. Погуглите как выглядит качественная силовая электроника и как выглядят китайские преобразователи для моделей на 400г.
5. На 80% оно сможет только висеть в ангаре, особенно при том весе который вы сказали, небольшое шевеление, смещение пилота и центр тяжести меняется, полезная нагрузка может варьироваться грубо говоря от 45 до 140кг. При маленькой нагрузке зад аппарата будет перевешивать, придется снижать тягу на передних двигателях и повышать на задних, при большой нагрузке наоборот. А теперь при этом надо еще иметь возможность наклоняться вперед назад, влево вправо и стабилизировать аппарат от порывов ветра, воздушных потоков от винтов и прочих радостей, обороты при этом значительно могут меняться. Плюс должен быть некоторый запас на случай неполадок, например выхода из строя двигателей, птиц еще никто не отменял. В противном случае это будет летающий гроб. Если заложить хотябы возможность выхода из строя одного двигателя то при этом часть двигателей должна повысить обороты а часть снизить, при этом суммарная тяга меньшего числа двигателей должна остаться прежней. Т.е. на один только отказ должен быть запас минимум чуть больше 5%. Сложите все это вместе и получите как раз около 50%.
Именно поэтому мне и интересны реальные технические подробности и цифры про этот аппарат а не догадки в левом бложке.
1. Ecalc проверяет мощности на винте и мотора, калькуляторы для этого — уже много лет написаны.
2. Карбон там, видно же даже (черные балки под белой декоративной пластмассой видны при сборке). Весит оно мало, современные материалы — рулят. :)
3. :)
4. Резисторы там нужны только на момент подключения (снимаются после) и довольно маломощные. Просто чтобы конденсаторы буферные зарядились. Можно просто напряжение повышать тоже — ячеек-то много последовательных, просто медленно подключаем по одной. К качеству собственно регуляторов это никак не относится, у любого такие проблемы будут — конденсаторы везде есть.
5. Центровке там смещаться некуда, разве что пассажир вылезет из кабины и на руках полезет на край. 80% — оно будет неплохо летать.
2. Карбон там, видно же даже (черные балки под белой декоративной пластмассой видны при сборке). Весит оно мало, современные материалы — рулят. :)
3. :)
4. Резисторы там нужны только на момент подключения (снимаются после) и довольно маломощные. Просто чтобы конденсаторы буферные зарядились. Можно просто напряжение повышать тоже — ячеек-то много последовательных, просто медленно подключаем по одной. К качеству собственно регуляторов это никак не относится, у любого такие проблемы будут — конденсаторы везде есть.
5. Центровке там смещаться некуда, разве что пассажир вылезет из кабины и на руках полезет на край. 80% — оно будет неплохо летать.
Посмотрел на офф сайте, ключевые моменты:
• maximum take-off weight of 450 kg
• more than one hour flight time
1. не проверяет
2. более того он еще и разборный тем не менее масса в полтора раза выше вашей расчетной
3. :)
4. резисторы они и в африке резисторы, в любом случае никто вручную не будет делать это а значит нужен нормальный контроллер, да и средства авионики на сайте тоже на фото присутствуют
5. ну да ну да, все люди одинаковые одного роста, одинаково сидят, всегда летают по двое и вобще киборги а не люди, ерунда, на фото на офф сайте видно что пассажирские места расположены так что спина касается оси аппарата а значит сел маленький человек — центр тяжести смещен назад, сел высокий большой человек центр тяжести смещается вперед, положил руки на колени центр тяжести уполз, почесал ухо снова сместился, с одной стороны незначительно с другой это все влияет. И запас у них там солидный, 4 двигателя поднимают полезной нагрузки 80 кило, с резервированием не совсем ясно но судя по анимашкам рассчитывают на отказ 3 двигателей.
• maximum take-off weight of 450 kg
• more than one hour flight time
1. не проверяет
2. более того он еще и разборный тем не менее масса в полтора раза выше вашей расчетной
3. :)
4. резисторы они и в африке резисторы, в любом случае никто вручную не будет делать это а значит нужен нормальный контроллер, да и средства авионики на сайте тоже на фото присутствуют
5. ну да ну да, все люди одинаковые одного роста, одинаково сидят, всегда летают по двое и вобще киборги а не люди, ерунда, на фото на офф сайте видно что пассажирские места расположены так что спина касается оси аппарата а значит сел маленький человек — центр тяжести смещен назад, сел высокий большой человек центр тяжести смещается вперед, положил руки на колени центр тяжести уполз, почесал ухо снова сместился, с одной стороны незначительно с другой это все влияет. И запас у них там солидный, 4 двигателя поднимают полезной нагрузки 80 кило, с резервированием не совсем ясно но судя по анимашкам рассчитывают на отказ 3 двигателей.
Так всё-таки какие преимущества перед обычным вертолётом? Только удобство управления? Стоит ли это резкого усложнения конструкции…
Основное преимущество будет существенно позднее, когда прийдет массовое коммерческое внедрение. А пока что прототипа и единичные экземпляры как обычно будут очень дорогими. В изготовлении по всей видимости они будут достаточно недорогими через некое количество лет. Не нужно применять сложных технологических процессов, как при сборке вертолёта.
Да ладно! 18 небольших двигателей всегда сложнее, дороже и менее оптимально, чем один-два больших. Пока мне кажется, что аналогичный вертолёт в любом случае будет проще и дешевле. Так в чём смысл?
Вы где-то видели электрические вертолеты, заряжающиеся от розетки? Я что-то нет.
Более того вертолётом нельзя управлять просто джойстиком.
Не будем мешать ребятам, а то вдруг у них всё получится.
Более того вертолётом нельзя управлять просто джойстиком.
Не будем мешать ребятам, а то вдруг у них всё получится.
А электрический вертолёт невозможен? По-моему, его гораздо проще сделать.
Что-то у меня ощущение, что ребята занимаются мультикоптером только потому, что это «модно». Преимуществ не видно.
Что-то у меня ощущение, что ребята занимаются мультикоптером только потому, что это «модно». Преимуществ не видно.
Я выше вам написал.
Ознакомьтесь с тем, что нужно сдать для получения сертификата пилота вертолёта.
Ребята же пытаются найти путь, где управлять вертолётом будет не тяжелее автомобиля. Фишка в массовом рынке, на которыq они хотят выйти. С классическим электрический вертолётом вы этого не сделаете. И ничего плохого в этом нет. Удачи им. Скептики были всегда везде. Почему когда кто-то делится своим проектом такого масштаба, — все сразу какашками поливают? Если вы в теме, — поддержите ребят и расскажите им «как сделать лучше». Нет? Просто пожелайте им удачи.
Ознакомьтесь с тем, что нужно сдать для получения сертификата пилота вертолёта.
Ребята же пытаются найти путь, где управлять вертолётом будет не тяжелее автомобиля. Фишка в массовом рынке, на которыq они хотят выйти. С классическим электрический вертолётом вы этого не сделаете. И ничего плохого в этом нет. Удачи им. Скептики были всегда везде. Почему когда кто-то делится своим проектом такого масштаба, — все сразу какашками поливают? Если вы в теме, — поддержите ребят и расскажите им «как сделать лучше». Нет? Просто пожелайте им удачи.
Так им проще управлять и у него выше маневренность.
UFO just landed and posted this here
Я думаю, до трех движков могут отрубиться довольно безболезненно. У внешних движков — большие плечи, они легко компенсируют отсутствие соседей. Дальше уже балласт придется сбрасывать, так как запас по тяге — не бесконечен (у движков на противоположной стороне придется уменьшать тягу соостветственно).
Сложность управления — это вообще оксюморон, на программном уровне это выглядит как операция с массивом в 18 элементов, даже примитивный восьмиразрядный микроконтроллер справится.
Основное приемущество, как мне видется, это намного бОльшая простота (с механической точки зрения) самих двигателей, чем на классических вертолетах. Т.е. в классических используется сложные механизмы изменения наклона лопостей, взаимонаправленные лопости и пр. А здесь при поломке достаточно заменить очень простой электрический двигатель с обыкновенным цельным винтом.
Решив вопрос с источником питания (гибридный агрегат упомянут в статье) и наладив массовое производство можно получить простой в ремонте, массовый и удобный способ передвижения.
Решив вопрос с источником питания (гибридный агрегат упомянут в статье) и наладив массовое производство можно получить простой в ремонте, массовый и удобный способ передвижения.
Вы слабо себе представляете насколько сложен вертолет. По стоимости — может они и будут конкурировать (ну да, меди много в движках и редкоземельных магнитов), но по простоте — коптеры обгонят вертолет гарантировано.
Так в чём преимущество этой простоты, если вы конечно не сами в гараже его делаете?
340 000$ — это цена четырёх-местного Robinson R44 Raven I с запасом хода 650 км.
Плюс возможность авторотации в случае отказа двигателя.
Если бы этот коптер стоил бы в разы меньше, тогда выгода простоты была бы очевидна.
340 000$ — это цена четырёх-местного Robinson R44 Raven I с запасом хода 650 км.
Плюс возможность авторотации в случае отказа двигателя.
Если бы этот коптер стоил бы в разы меньше, тогда выгода простоты была бы очевидна.
Ну, 340000 — это чуток завышенная цена, на самом деле. Себестоимость получается что-то около $1000 за мотор с пропеллером плюс каркасс и корпус. Простота же поможет в обслуживании (посмотрите сколько стоит периодическое обслуживание вертолета и из чего оно состоит), ну и управление простое очень. Маневренность выше опять же.
Авторотацию тут, кстати, тоже можно сделать (при такой суммарной площади винтов), если сохранится управление моторами. Ну и «из коробки» — устойчивость к отказам нескольких двигателей.
Авторотацию тут, кстати, тоже можно сделать (при такой суммарной площади винтов), если сохранится управление моторами. Ну и «из коробки» — устойчивость к отказам нескольких двигателей.
Со стоимостью обслуживания, пожалуй, соглашусь. Остальное весьма спорно.
Китайский мотор на несколько киловатт — от 300 до 500 баксов. 60-дюймовый ропеллер — чуток меньше. Даже если брендовый мотор на заказ делать — максимум раз в пять будет дороже.
Если уж гнаться за ценой и «простотой», то автожир будет ещё выгоднее. Можно вообще до 10 000$ уложиться.
У автожира — ни маневеренности, ни простоты управления, ни вертикального взлета.
У каждого устройства своя область применения. Хотя по простоте управления он вроде как очень хорош, бывает и с вертикальным взлётом. Плюс летает всегда на авторотации, то есть максимально безопасно из всех винтокрылых машин.
Винт автожира — тоже довольно сложная механика. А невозможность зависать или лететь в любом направлении — серьезный минус, для вертикального взлета/посадки — нужна сложная техника. Плюс еще и сложность управления — как у самолета (а у коптера — два джойстика, куда нажал — туда и летит, никакой тебе аэродинамики и штопоров).
Товарищ vasimv вот тут рассуждает о гибридном коптере geektimes.ru/post/252070
И у него получается, что на электричестве долго не налетаешь, а схема ДВС->генератор->моторы не очень то эффективна (аж до 70% потерь, может ошибка и КПД от 70%?)
И он склоняется к 1-2 большим винтам только вертикальной тяги (без перекоса лопастей) и несколько небольших электромоторов для разворотов и движения вбок и вперёд.
Если потери правда такие большие (до 30%) то смысла в 18 движках никакого нет. IMHO
И у него получается, что на электричестве долго не налетаешь, а схема ДВС->генератор->моторы не очень то эффективна (аж до 70% потерь, может ошибка и КПД от 70%?)
И он склоняется к 1-2 большим винтам только вертикальной тяги (без перекоса лопастей) и несколько небольших электромоторов для разворотов и движения вбок и вперёд.
Если потери правда такие большие (до 30%) то смысла в 18 движках никакого нет. IMHO
Здесь КПД будет в районе 80 процентов, преобразования ДВС->электричество-то нет. 18 двигателей им нужны банально из-за доступности компонентов, электрических двигателей, которые бы давали 20+ килограмм тяги — в магазинах и так немного (и довольно дороги), а более мощных и не найти совсем (ну и размер лопастей был бы совсем неприличным). А так — даже резерв есть на случай выхода из строя нескольких движков или поломки пропеллеров. И дешевле вертолетной механики.
Вспоминаются ребята, которые получили премию Сикорского. У них тоже, своего рода, «квадрокоптер» был :)
Sign up to leave a comment.
Немецкие энтузиасты работают над созданием пилотируемого мультикоптера