Comments 46
Иногда такая схема может быть полезна, но учитывая стоимость (мизерную) ардуинок — для любителей может и не понадобиться, хотя для более серьезных разработок может оказаться находкой.
ОУ можно применить любой?
ОУ можно применить любой?
Если я ничего не путаю, это не операционный усилитель, а инвертор — элемент «НЕ».
Ну и заодно, в качестве «применения» для этой схемы могу предложить «Аналоговый люксомер» :-)
Ну и заодно, в качестве «применения» для этой схемы могу предложить «Аналоговый люксомер» :-)
Отличная идея! Стрелка, шкала и готово — сервопривод как имитация механического электроизмерительного прибора.
для автоматизированных жалюзей ))
Там не операционный усилитель, а логический элемент НЕ(инвертор) из микросхемы 74HC14. И лучше усилить его включением оставшихся элементов микросхемы параллельно. Хоть ток и мизерный должен быть, но мало ли что на входе китайской сервы поставят.
Это триггер Шмитта.
На схеме обозначен Hex inverting Schmitt trigger https://www.nxp.com/documents/data_sheet/74HC_HCT14.pdf
Ардуинка вряд ли может сравниться как по компактности, так и по стоимости (за плюс-минус бакс можно собрать шесть каналов). К тому же абсолютно аппаратное решение не требует установки IDE/библиотек/программирования, что снижает порог входа для начинающего DIY электронщика. Поэтому, автору респект!
Ардуинка вряд ли может сравниться как по компактности, так и по стоимости (за плюс-минус бакс можно собрать шесть каналов). К тому же абсолютно аппаратное решение не требует установки IDE/библиотек/программирования, что снижает порог входа для начинающего DIY электронщика. Поэтому, автору респект!
я сделаю эту задачу на attiny5 — всего 6 ног корпус sot23 при этом будет сохранена линейность и возможность калибровки мин/макс ну и кривая освещенность/сопротивление тоже не линия — потому при небольшом затенении вконце серва делает больше половины хода. Плюс вся эта схема нереально чувствительна ко влаге, напряжению питания, качеству кондеров а на МК только фоторезистор и все. так что про компактность — поспорил бы
зачем здесь ардуина, если tiny голый справится без проблем?
Эхъ, сейчас какой-нибудь дуринщик запостит картинку про буханку и троллейбус :-)
… а меня в SG90 и иже с ним, больше всего парит то, что внутри там опять-же микроконтроллер простаивает, вот если бы да ка бы, да за пилили китайцы возможность в оном прошивку менять, было бы классно, хочешь 90 градусов, а хочешь цифра, хочешь шим…
… а меня в SG90 и иже с ним, больше всего парит то, что внутри там опять-же микроконтроллер простаивает, вот если бы да ка бы, да за пилили китайцы возможность в оном прошивку менять, было бы классно, хочешь 90 градусов, а хочешь цифра, хочешь шим…
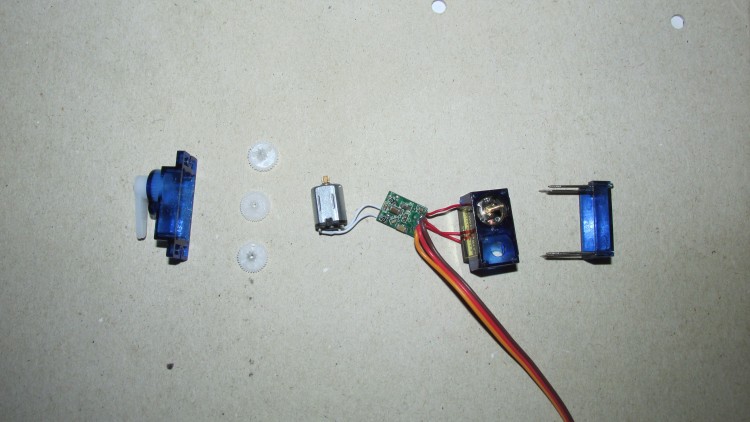
Там сами по себе элементы не слишком сложные внутри — датчик углового положения (потенциометр, нарример), драйвер ДПТ (можно обычный MOSFET) и контроллер, считываюший показания датчика и управляющий двигателем так, чтобы обеспечить требуемое положение, по заданному алгоритму. Если писать самому ПО для контроллера, можно разные алгоритмы попробовать и всякие свои хотелки реализовать. Но здесь у каждого свои подходы. Я вот так и не допаял сверхрегенератор для авиадиапазона — слушаю ACARS через все-таки приехавший (через Якутию? :-) приемник на RTL, удобнее и без не слишком уже интересных мне усилий :-) В качестве апофеоза противоположного подхода могу привести запавшую в память стародавнюю заметку в журнале «Радио» — автор предлагал ПИЛИТЬ погоревшие КЦ405—е, чтобы использовать уцелевшие диоды :-)
А вы уверены что там вообще есть контроллер? Не думаю что для такой простой системы он вообще нужен.
Разве там микроконтроллер? Там обычная аналоговая схема с компаратором. ШИМ преобразуется в аналог, аналог сравнивается с сигналом от потенциометра компаратором и разница выдаётся на мостовой драйвер управления двигателем. Какие там микроконтроллеры…
Описанный Вами алгоритм слежения, конечно, удобен, но можно и PID-алгоритм применить. Вот здесь статья, в которой автор из Arduino и ДПТ сделал самодельную серву именно с ПИД-регулятором: http://abigmagnet.blogspot.com.by/2008/10/dc-motor-control-part-one.html
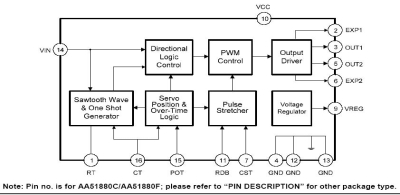
В SG90 вот эта ИС внутри стоит: SERVO MOTOR CONTROLLER AA51880 http://pdf.datasheetcatalog.com/datasheets2/28/289004_1.pdf
В SG90 вот эта ИС внутри стоит: SERVO MOTOR CONTROLLER AA51880 http://pdf.datasheetcatalog.com/datasheets2/28/289004_1.pdf


так и на 555 таймере наверно можно также сделать
Купил себе по случаю кучку PIC10F202, по 11,5 руб Думаю, вопрос с дешевизной можно закрыть. Осталось развести и настравить под них столько же макеток на все случаи. А может у кого есть готовые?
А ещё ведь есть такой вариант. Тоже, вроде как, недорого.
А для чего в сервоприводах используется ШИМ-метод управления а не аналоговый уровень напряжения/тока? Для исключения помех?
UFO just landed and posted this here
Просто и сердито.
UFO just landed and posted this here
А от серийного или последовательного порта получится одновременно запитать и управлять? Вроде из ВинХР и никсов можно дергать пины напрямую…
Не получиться, там токи маленькие выходные. А сервопривод по питанию потребляет прилично, как я говорил, до 300мА.
Т.е. отводку от БП и рулить через транзистор? Мотивация примерно такая же как у автора: иметь возможность покрутить мотором туда-сюда без микроконтроллера, надоело на каждый чих LUFA использовать. Serial/CDC не подходит, если физических и виртуальных портов больше 10, на компе Win, и нет уверенности, что дрова под все устройства на серийных портах писал разумный человек, который помнит, что начиная с 10 порта есть нюансы
UFO just landed and posted this here
Нет, не снимается. Это как бы схема для «быстрого» тестирования сервопривода.
Сервопривод и нужен для постоянного поддержания заданного угла. Что вы собираетесь спалить в нем?
Как верно уже заметили, в этом и состоит задача сервы — держать заданный угол. От себя добавлю, что можно использовать и шаговый двигатель в подобной роли — у него тоже есть некоторый момент удержания.
Sign up to leave a comment.
Управление сервоприводом SG90 без микроконтроллера