Comments 4
Скажите пожалуйста, как сдвинуть камеру относительно системы координат робота.
Вот, на рисунке изображено положение кинекта и начало СК робота
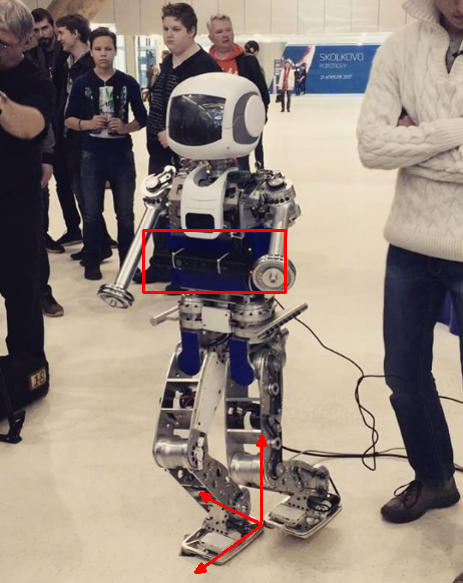
Т.е. хотелось бы получать координату не камеры, а СК робота. Пытался вставить промежуточный фрейм между map, odom и фреймами камер, но особо не вышло, rtabmap ломается.
Я с этим не имел дело, но думаю вам нужно использовать пакет tf. Примеры можно посмотреть здесь для rtabmap и в моей статье (файл my_localize.launch).
Жалко, что Майкрософт прекратила производство Kinect'а.
Sign up to leave a comment.
Локализация и навигация в ROS с использованием rtabmap