Мотор аксиального магнитного потока использует распечатанные на принтере платы как электромагнитные катушки
Перевод статьи с сайта spectrum.ieee.org, автор: Carl Bugeja
Всё началось с того, что мне захотелось сделать очень маленький дрон. Но я быстро понял, что один фактор ограничивает попытки уменьшить и облегчить проект: моторы. Даже небольшие моторы представляют собой отдельные объекты, которые необходимо соединять со всей остальной электроникой и структурными элементами. Поэтому я начал думать о способе слияния этих элементов для экономии массы.
Я вдохновился тем, что некоторые радиосистемы используют антенны, представляющие собой медные дорожки на печатной плате. Можно ли использовать что-то подобное для создания достаточно сильного магнитного поля, способного питать мотор? Я решил посмотреть, удастся ли мне создать мотор аксиального магнитного потока при помощи электромагнитных катушек, исполненных в виде дорожек на печатной плате. В моторе аксиального магнитного потока электромагнитные катушки, формирующие статор, крепятся параллельно ротору, выполненному в виде диска. Постоянные магниты встраиваются в диск ротора. Подача на катушки статора переменного тока заставляет ротор вращаться.
Первой трудностью было гарантировать получение достаточно сильного магнитного поля, способного повернуть ротор. Довольно просто создать плоскую спиральную дорожку и пропустить по ней ток, но я ограничил мотор диаметром в 16 мм, поэтому общий диаметр мотора был сравним с самыми мелкими готовыми моторами. 16 мм означало, что спираль может сделать только 10 оборотов, а всего катушек, расположенных на диске под ротором, может быть 6. Десять оборотов не хватит для получения достаточного магнитного поля. Однако печатные платы хороши тем, что на сегодня довольно просто сделать многослойную плату. Напечатав пачку катушек из четырёх слоёв мне удалось достичь 40 оборотов на катушку, что достаточно для поворота ротора.
В процессе разработки проявилась более серьёзная проблема. Чтобы поддерживать вращение мотора, необходимо синхронизировать динамически меняющееся магнитное поле между ротором и статором. В типичном моторе это делается при помощи переменного тока, и синхронизация получается естественным образом, благодаря расположению щёток, электрически соединяющих статор и ротор. В бесщёточном двигателе необходима управляющая электроника с системой обратной связи.

В каждом слое схемы есть набор катушек, и они кладутся одна на другую, связываясь между собой и образуя непрерывные дорожки.

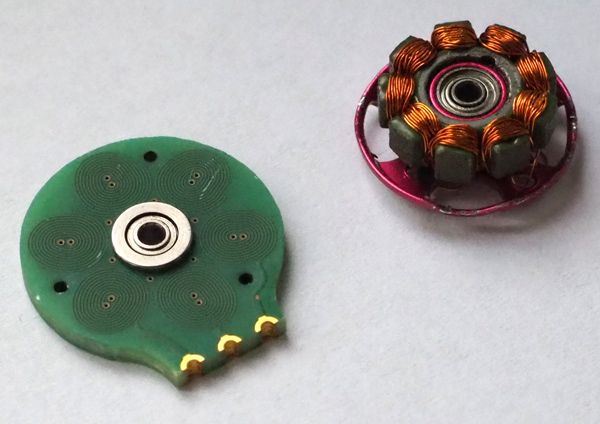
Итоговая четырёхслойная печатная плата

Импульсы этих катушек вращают распечатанный на 3D-принтере ротор, в который встроены постоянные магниты
Система не такая мощная, как традиционный бесщёточный мотор, но печатные платы получаются дешевле и легче
В предыдущей модели созданного мною мотора я использовал противоэдс как обратную связь для контроля скорости. Противоэдс получается из-за того, что вращающийся мотор работает как генератор, создавая напряжение в катушках статора, противодействующее напряжению, крутящему мотор. Информация о противоэдс даёт обратную связь, сообщающую о вращении мотора, и позволяет управляющей электронике синхронизировать катушки. Но в моём моторе с печатными платами противоэдс была слишком слабой, чтобы её можно было использовать. Поэтому я смонтировал на него датчик Холла, напрямую измеряющий изменение магнитного поля, чтобы измерять, насколько быстро ротор и его постоянные магниты крутятся над датчиком. Эта информация уходит в управляющую мотором электронику.
Для изготовления ротора я обратился к 3D-печати. Изначально я сделал ротор, который укрепил на отдельном металлическом стержне, но потом я просто начал печатать и стержень в качестве неотъемлемой части ротора. Это уменьшило количество физических компонентов до ротора, четырёх постоянных магнитов, подшипника и печатной платы, обеспечивающей и катушки и структурную прочность.
Вскоре мой первый мотор уже работал. Испытания показали, что он стабильно обеспечивает статический крутящий момент в 0,9 г*см. Этого момента не хватало для реализации моего изначального плана по созданию интегрированного мотора для дрона, но я подумал, что такой мотор всё же можно использовать в качестве двигателя для небольших и дешёвых роботов, передвигающихся по земле на колёсах, поэтому я продолжил изыскания (обычно моторы оказываются наиболее дорогостоящими частями роботов). Распечатанный мотор может работать с напряжением от 3,5 до 7 В, хотя при высоком напряжении он ощутимо греется. На 5 В его рабочая температура составляет 70 °C, что вполне допустимо. Он потребляет порядка 250 мА.
В настоящий момент я сконцентрировался на увеличении крутящего момента. Мне удалось его почти удвоить, добавив ферритовый лист к задней части катушек статора, чтобы ограничить силовые лини магнитного поля. Я также планирую другие прототипы моторов с иными системами намотки. Кроме того, я работаю над использованием таких же технологий для создания линейного привода, способного перемещать распечатанный ползун по ряду из 12 катушек. Также я испытываю прототип гибкой печатной платы, использующий такие же катушки. Моя цель – начать изготовление новых роботов, использующие более маленькие и дешёвые механизмы по сравнению с доступными сегодня.
