В данной статье я опишу решение поставленной мне задачи по снижению шума и повышению плавности движения механизма, движимого шаговым двигателем (далее просто ШД) при ускорении. Данная задача довольна специфична. Описанное мною решение будет полезно при разработке модулей управления ШД .
Далее опишу алгоритм управления ШД с помощью микроконтроллера.
Перед тем, как начать описывать задачу, я изложу основы управления ШД, которые будут включать необходимый минимум для рассмотрения, описанных в статье способов управления.
Рассмотрим необходимый минимум основ управления ШД , необходимый для понимания принципа управления, описанного ниже. А именно:
• Способы подключения обмоток, необходимые для осуществления данного режима работы. Полношаговый режим управления при задействовании на один шаг двух фаз.
• Изменение полярности обмотки с помощью Н-моста.
• Принципиальная электрическая схема, включающая в себя 4 драйвера полумоста и 2 Н-моста.
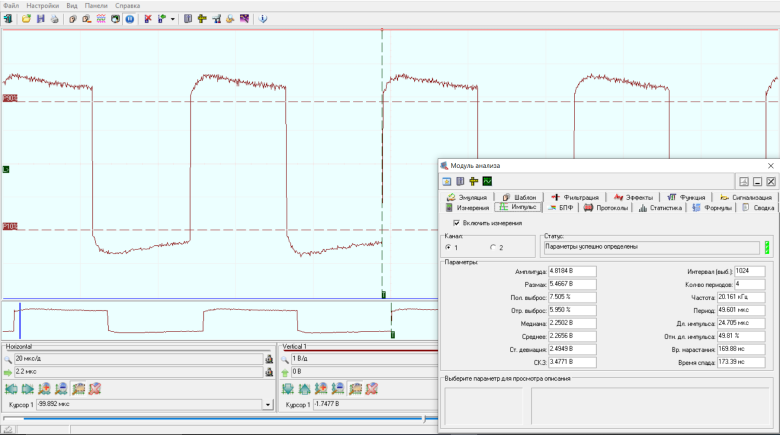
• Способ модуляции синусоидального сигнала с помощью широтно-импульсной модуляции (далее просто ШИМ).
• Способы подключения обмоток.






 В предыдущем посте был описан начальный этап создания охранной системы, с подробным описанием выбора и подключения датчиков к микроконтроллеру, передачи информации на компьютер и создание макета комнаты для тестирования и отладки самой системы. Прочитать об этом можно
В предыдущем посте был описан начальный этап создания охранной системы, с подробным описанием выбора и подключения датчиков к микроконтроллеру, передачи информации на компьютер и создание макета комнаты для тестирования и отладки самой системы. Прочитать об этом можно