Задача - повысить устойчивость, управляемость, маневренность крупных мультикоптеров. Имеются ввиду грузовые, одноместные и многоместные eVTOL.
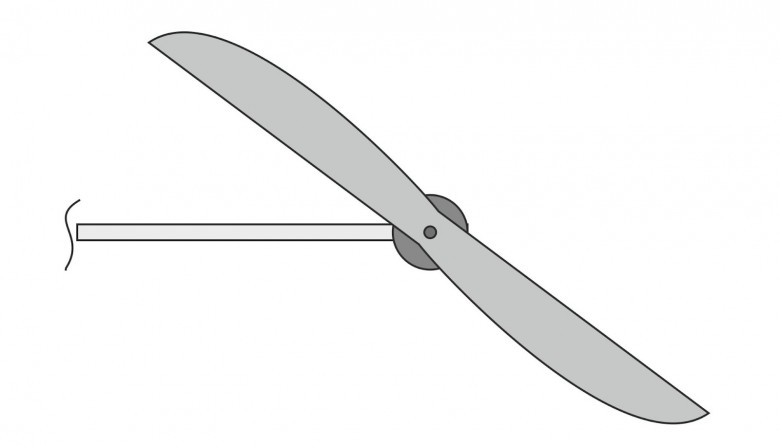
Начну с проблемы. С ростом размеров коптера и масштабированием выявляется основная проблема в этой технологии - снижение отзывчивости винто-моторных групп за счет задержки и не возможности быстрого изменения оборотов “большого” воздушного винта фиксированного шага, что приводит к получению “медленного контура регулирования” и соответственно к неисправимой осцилляции, резонансным явлениям, загрублению PID-параметров и в итоге к потери стабильности при удержании коптера в воздухе. При этом отзывчивость и управляемость коптера падает настолько, что управление подобным ЛА становится испытанием для пилота и автопилота любого уровня. Все очень просто - в отличие от вертолета, копер держится в воздухе за счет постоянного контроля и возможности быстрого изменения тяги на своих лучах. Это позволяет ему держаться ровно в воздухе без кренов и раскачки. За это отвечает полетный компьютер, который анализирует датчики положения в пространстве и отправляет сигналы на лучи к моторам через контроллеры. Полетный компьютер работает быстро - тысячи раз в секунду (реальная скорость работы примерно 400 Гц) происходит изменение тяги на одном канале. Однако дальше идет канал связи, контроллер мотора, сам мотор и воздушный винт. Именно при увеличении размеров мотора и воздушного винта происходит резкое снижение скорости изменения тяги - тяжелый винт большого диаметра раскрутить и остановить гораздо сложнее чем маленький и легкий. А компьютер не прекращает отправлять сигнал на луч и требовать изменений - изменения тяги происходят но уже с задержкой. Компьютер пытается компенсировать тягой на другом луче и вся система раскачивает сама себя с нарастающей амплитудой что может привести к аварии. Данную проблему можно частично решить настройкой компьютера и PID-параметров. Однако это лишь частично приводит к результату - аппарат становится очень медлительным и инертным, неспособным к резким маневрам или борьбе с порывами ветра. Именно поэтому на рынке eVTOL так мало примеров полетов на крупных коптерах с энергичными маневрами, поворотами, набором высоты, снижением, в условиях ветровых нагрузок, с полной загрузкой и пр. Проблема у всех одна и та же, законы физики работают для всех одинаково: для нас, для Joby, CityAirbus, Archer, Blade, Beta, Lift, Volocopter, E-hang и др. Если вы видите воздушные винты диаметром от 40” и выше - то проблема точно будет.