Добрый день, уважаемые хабрачитатели! В прошлую пятницу в нашей лаборатории проходил практический мастеркласс по платформе ROS — ROS workshop. Воркшоп был организован для студентов факультета информационных технологий Технического университета Брно, желающих познакомиться с этой платформой. В отличие от предыдущих лет (воркшоп проводится уже 4 года), в этот раз ROS workshop был ориентирован на самостоятельную практическую работу. В статье я собираюсь рассказать о задаче, которая была поставлена перед участниками воркшопа. Кому интересно, прошу под кат.
Использование симуляторов в робототехнике на примере симулятора Gazebo и робота DARwIn-OP, играющего в футбол
9 min
Tutorial
Эта статья открывает серию уроков, в которых мы попробуем разобраться с использованием возможностей современных физических симуляторов и программных платформ для облегчения разработки и отладки ПО при создании сложных робототехнических систем.
В качестве симулятора мы возьмем пакет Gazebo 3D, а человекоподобный DARwIn-OP, которого мы заставим играть в футбол, будет использован в качестве универсальной робототехнической платформы.
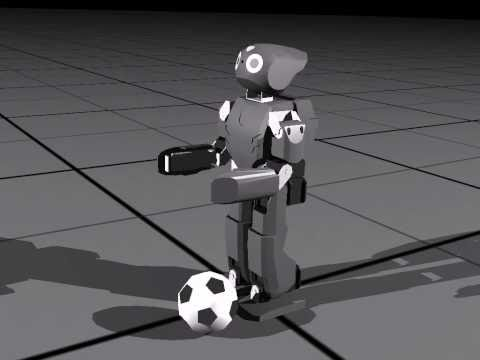
DARwIn-OP в симуляторе Gazebo
Для изучения уроков, использования примеров кода, а также написания собственных алгоритмов вам не потребуется приобретение дорогостоящего оборудования или ПО. Все программное обеспечение бесплатно, а отладка и демонстрация алгоритмов будет проводится в симуляторе. Законченный проект будет портирован на реального робота для демонстрации результатов.
В качестве симулятора мы возьмем пакет Gazebo 3D, а человекоподобный DARwIn-OP, которого мы заставим играть в футбол, будет использован в качестве универсальной робототехнической платформы.
DARwIn-OP в симуляторе Gazebo
Для изучения уроков, использования примеров кода, а также написания собственных алгоритмов вам не потребуется приобретение дорогостоящего оборудования или ПО. Все программное обеспечение бесплатно, а отладка и демонстрация алгоритмов будет проводится в симуляторе. Законченный проект будет портирован на реального робота для демонстрации результатов.
OpenAI Gym+ROS+Gazebo: обучение автономного робота в домашних условиях. Часть 1
6 min
За последние несколько лет мы стали свидетелями внедрения технологий искусственного интеллекта в нашу повседневной жизни — от роботов-пылесосов до беспилотных дронов. Все они, управляемые искусственным интеллектом, уже являются для нас обыденностью. Но несмотря на это, процесс разработки, от проектирования до реализации, занимает годы и обходится не дешево. Кроме того, алгоритмы машинного обучения требуют большие данные и нет никаких гарантий, что в конечном счете все сработает.
Рано или поздно каждый разработчик приходит к выводу, что перед созданием реального робота необходимо протестировать концепт в симуляции, отладить все системы и, в конце концов, понять, тот ли путь разработки был выбран.
Похожие мысли были и у доктора Эндрю Ховарда, когда он со своим учеником Нейтоном Кенигом в 2002 году приступил к разработке 3D симулятора Gazebo в Университете Южной Калифорнии. Концепция симулятора высокой точности возникал из-за необходимости тестировать роботов в различных сложных условиях вне помещений. На первых этапах разработки такой подход позволяет сэкономить время и средства на приобретении необходимого оборудования.
В этой серии статей я бы хотел поделиться своим опытом симуляции и обучения беспилотного автомобиля имея только одну обычную камеру в качестве сенсора.
Рано или поздно каждый разработчик приходит к выводу, что перед созданием реального робота необходимо протестировать концепт в симуляции, отладить все системы и, в конце концов, понять, тот ли путь разработки был выбран.
Похожие мысли были и у доктора Эндрю Ховарда, когда он со своим учеником Нейтоном Кенигом в 2002 году приступил к разработке 3D симулятора Gazebo в Университете Южной Калифорнии. Концепция симулятора высокой точности возникал из-за необходимости тестировать роботов в различных сложных условиях вне помещений. На первых этапах разработки такой подход позволяет сэкономить время и средства на приобретении необходимого оборудования.
В этой серии статей я бы хотел поделиться своим опытом симуляции и обучения беспилотного автомобиля имея только одну обычную камеру в качестве сенсора.
ROS книги по робототехнике переведенные на русский язык
6 min
Translation
Robot Operating System это фреймворк который позволяет эффективно программировать современных роботов.
Симулятор беспилотного гоночного болида на основе Gazebo 11 и ROS2 Foxy
Medium
8 min
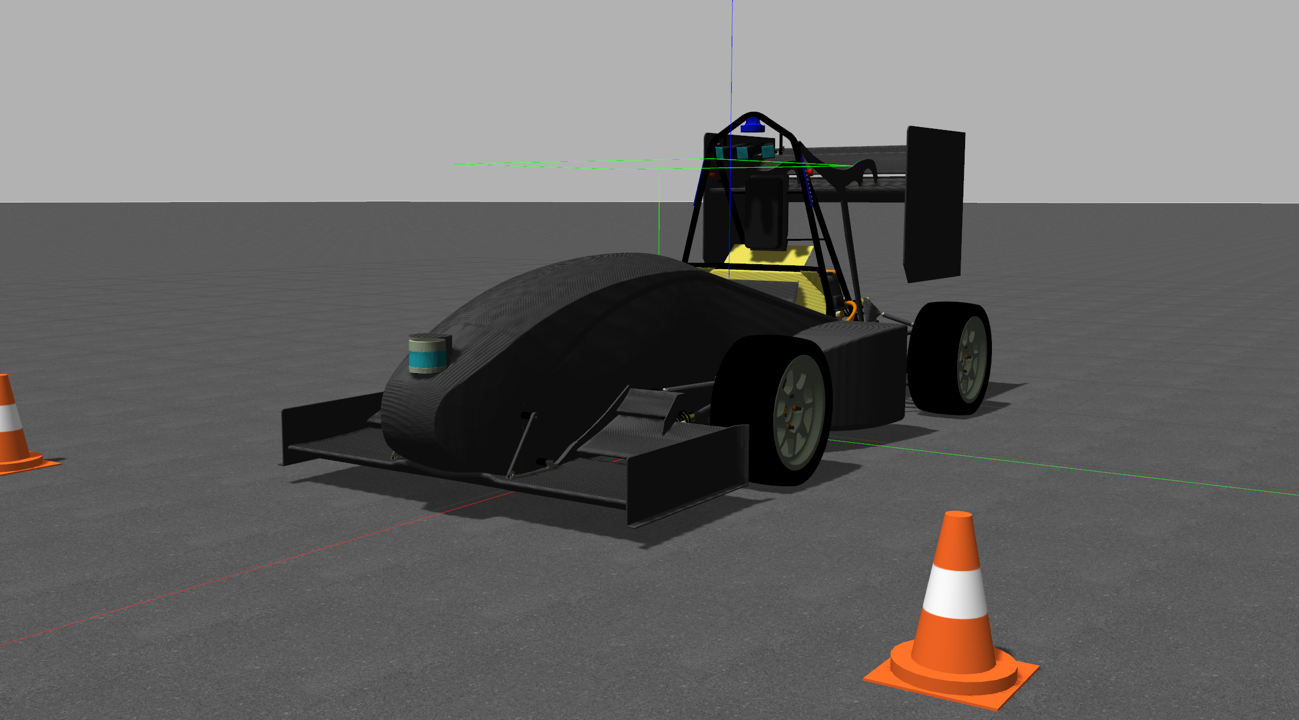
Привет, Хабр! Недавно прошел ROS Russian Meetup, посвященный робототехнике. На митапе наша команда Bauman Racing Team из МГТУ им. Н.Э. Баумана представила собственный симулятор для беспилотного гоночного автомобиля, о котором пойдет речь в данной статье.
Контроллер управления по типу Аккерманна на базе 4-колёсной мобильной платформы (ROS Noetic)
Hard
26 min
Tutorial
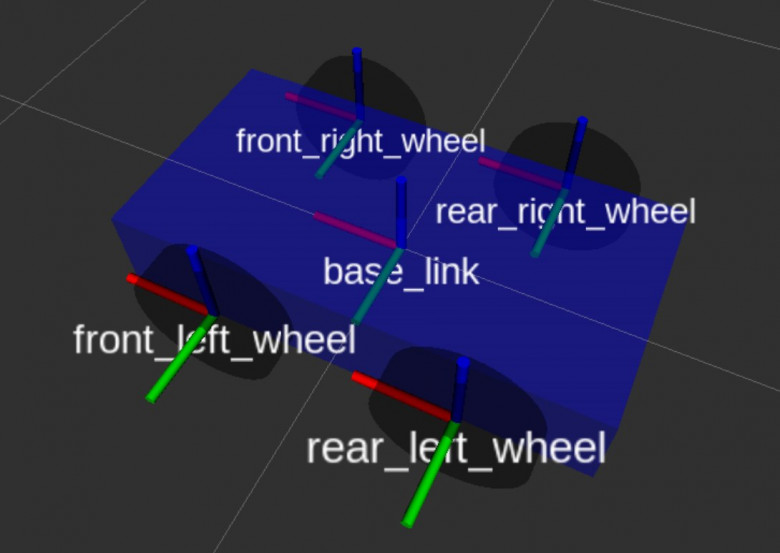
В данной работе рассматривает пример создания симуляционной модели четырёхколёсной мобильной платформы с рулевым управления по типу Аккреманна, с использованием фреймворка ROS, контроллер написан на языке Python. В качестве среды симуляции выбрана Gazebo. Приведены примеры описания архитектуры робота, посредством формата urdf, разработан собственный контроллер для управления колёсами модели, а также показан общий подход к проектированию симуляционных моделей робототехнических систем.
DARPA провело конкурс человекоподобных роботов в виртуальной реальности
2 min
В четверг, 27 июня DARPA огласило результаты первого этапа конкурса по созданию человекоподобных роботов (DARPA robotics challenge). Цель проекта — создать робота, который сможет пользоваться оборудованием, инструментами, помещениями и транспортом, предназначенным для человека, и при этом быть достаточно простым в управлении. Такой робот сможет заменить людей в опасной среде — при тушении пожаров, авариях и стихийных бедствиях. Первый этап конкурса проходил в виртуальной реальности — внутри симулятора Gazebo, созданного Open Source Robotics Foundation (OSRF). На втором этапе, который пройдёт в декабре этого года, участникам предстоит управлять уже реальными роботами ATLAS производства Boston Dynamics.
В ходе конкурса виртуальные роботы должны были выполнить три вида заданий: сесть в автомобиль и проехать трассу с препятствиями, пройти по пересечённой местности, присоединить пожарный шланг к крану в стене и открыть вентиль. На каждое задание давалось пять попыток с различными ограничениями во времени и качестве связи с виртуальным роботом — чтобы сделать условия ближе к боевым, полоса пропускания для связи с роботом варьировалась от 900 до 60 мегабит, а пинг был увеличен до 500 миллисекунд.
Пример успешного выполнения одного из заданий.
В ходе конкурса виртуальные роботы должны были выполнить три вида заданий: сесть в автомобиль и проехать трассу с препятствиями, пройти по пересечённой местности, присоединить пожарный шланг к крану в стене и открыть вентиль. На каждое задание давалось пять попыток с различными ограничениями во времени и качестве связи с виртуальным роботом — чтобы сделать условия ближе к боевым, полоса пропускания для связи с роботом варьировалась от 900 до 60 мегабит, а пинг был увеличен до 500 миллисекунд.
Пример успешного выполнения одного из заданий.
Интервью с генеральным директором Фонда Open Source Robotics Foundation
6 min

Фонд Open Source Robotics Foundation (OSRF) был основан Willow Garage (научно-исследовательский институт/инкубатор робототехники) три года назад – после того, как компания заключила контракт с Агентством по перспективным оборонным научно-исследовательским разработкам США (DARPA) на создание среды моделирования Gazebo для конкурса DARPA Robotics Challenge. Теперь фонд OSRF больше не будет получать поддержку DARPA на осуществление своей деятельности. Сегодня вы узнаете о будущем Gazebo, ROS и OSRF в интервью с генеральным директором Брайаном Герки..
Робот-тележка на ROS. Часть 4. Создаем симуляцию робота, используя редакторы rviz и gazebo
14 min
Tutorial
Посты серии:
8. Управляем с телефона-ROS Control, GPS-нода
7. Локализация робота: gmapping, AMCL, реперные точки на карте помещения
6. Одометрия с энкодеров колес, карта помещения, лидар
5. Работаем в rviz и gazebo: xacro, новые сенсоры.
4. Создаем симуляцию робота, используя редакторы rviz и gazebo.
3. Ускоряемся, меняем камеру, исправляем походку
2. Софт
1. Железо
Продолжение цикла статей о создании небольшого робота. В этот раз речь пойдет о создании копии робота в симуляции, которую предлагают визуальные ROS-среды rviz и gazebo (далее «редакторы»). Работа в редакторах будет вестись на виртуальной машине, образ которой был ранее предоставлен для скачивания образ. Так как речь идет о симуляции, построении модели, сам робот-тележка не понадобится.
8. Управляем с телефона-ROS Control, GPS-нода
7. Локализация робота: gmapping, AMCL, реперные точки на карте помещения
6. Одометрия с энкодеров колес, карта помещения, лидар
5. Работаем в rviz и gazebo: xacro, новые сенсоры.
4. Создаем симуляцию робота, используя редакторы rviz и gazebo.
3. Ускоряемся, меняем камеру, исправляем походку
2. Софт
1. Железо
Продолжение цикла статей о создании небольшого робота. В этот раз речь пойдет о создании копии робота в симуляции, которую предлагают визуальные ROS-среды rviz и gazebo (далее «редакторы»). Работа в редакторах будет вестись на виртуальной машине, образ которой был ранее предоставлен для скачивания образ. Так как речь идет о симуляции, построении модели, сам робот-тележка не понадобится.
Робот-тележка на ROS. Часть 5. Работаем в rviz и gazebo: xacro, новые сенсоры
10 min
Tutorial
Посты серии:
8. Управляем с телефона-ROS Control, GPS-нода
7. Локализация робота: gmapping, AMCL, реперные точки на карте помещения
6. Одометрия с энкодеров колес, карта помещения, лидар
5. Работаем в rviz и gazebo: xacro, новые сенсоры.
4. Создаем симуляцию робота, используя редакторы rviz и gazebo.
3. Ускоряемся, меняем камеру, исправляем походку
2. Софт
1. Железо
В прошлый раз удалось добиться следующих целей:
В этом посте оформим проект в виде модулей xacro, чтобы он стал более читаемым (ранее для наглядности мы затолкали все описание в один xacro файл). Добавим виртуальную видеокамеру и imu. Просмотрим как добавлять в gazebo посторонние предметы окружающего мира.
8. Управляем с телефона-ROS Control, GPS-нода
7. Локализация робота: gmapping, AMCL, реперные точки на карте помещения
6. Одометрия с энкодеров колес, карта помещения, лидар
5. Работаем в rviz и gazebo: xacro, новые сенсоры.
4. Создаем симуляцию робота, используя редакторы rviz и gazebo.
3. Ускоряемся, меняем камеру, исправляем походку
2. Софт
1. Железо
В прошлый раз удалось добиться следующих целей:
- визуализировать робота, создав xacro-файл, содержащий urdf-описание робота;
- создать два launch файла, один из которых позволяет разместить робота в редакторе-симуляторе Gazebo;
- поуправлять роботом в симуляторе Gazebo с клавиатуры.
В этом посте оформим проект в виде модулей xacro, чтобы он стал более читаемым (ранее для наглядности мы затолкали все описание в один xacro файл). Добавим виртуальную видеокамеру и imu. Просмотрим как добавлять в gazebo посторонние предметы окружающего мира.
ROS: стань контрибьютором самого большого Open Source проекта в робототехнике
9 min
ROS - самая популярная открытая робототехническая платформа в настоящий момент. Я и мои коллеги в Samsung Research - основные контрибьюторы Navigation2 Stack, важнейшего компонента ROS, который отвечает за движение роботов.
В этой статье я расскажу в целом о ROS, о разрабатываемом нами стеке и о том, как организована коллективная работа над проектом. В заключение - о нашем треке в школе разработчика COMMoN, которую мы со Стивом Масенски из Samsung Research America, лидером проекта ROS2 Navigation Stack, проведем в августе-сентябре этого года в рамках конференции Samsung Open Source Conference Russia. Участники школы получат шанс внести вклад в репозиторий стека и сделать свой коммит в известный проект.