Началось все с того, что как то на прослушке своих ушей Beyerdynamic DT880 600ohm(!) я воткнул их в какой-то породистый ламповый усилок и понял, что жить со своим старичком (тоже ламповым) я уже не смогу.
Спойлер, конечный результат:


Инженер
Началось все с того, что как то на прослушке своих ушей Beyerdynamic DT880 600ohm(!) я воткнул их в какой-то породистый ламповый усилок и понял, что жить со своим старичком (тоже ламповым) я уже не смогу.
Спойлер, конечный результат:
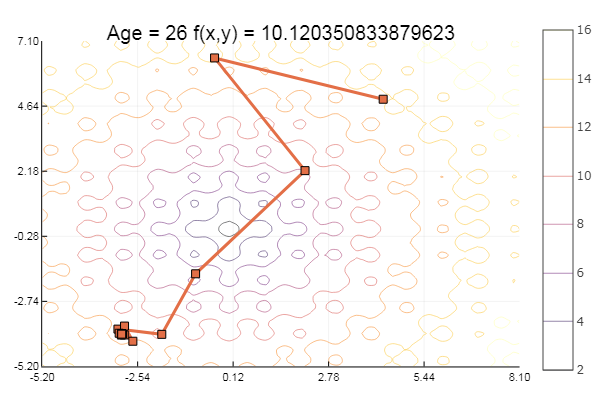
Продолжаем знакомство с методами многомерной оптимизации.
Далее предложена реализация метода наискорейшего спуска с анализом скорости выполнения, а также имплементация метода Нелдера-Мида средствами языка Julia и C++.
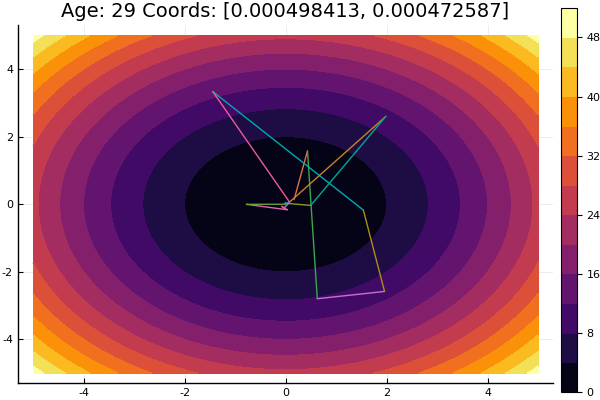
Метод покоординатного спуска является одним из простейших методов многомерной оптимизации и неплохо справляется с поиском локального минимума функций с относительно гладким рельефом, поэтому знакомство с методами оптимизации лучше начинать именно с него.
Поиск экстремума ведется в направлении осей координат, т.е. в процессе поиска изменяется только одна координата. Таким образом, многомерная задача сводится к одномерной.

Всем привет!
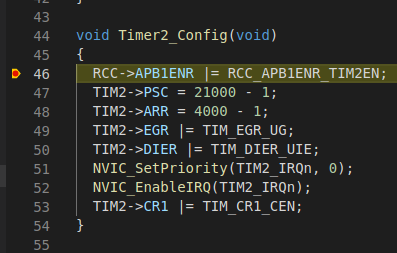
Сегодня рассмотрим настройку удобной и красивой среды разработки для программиста микроконтроллеров с помощью набора полностью бесплатных инструментов разработки.
Все шаги проверены на виртуальной машине со свежеустановленной Ubuntu 16.04 xenial desktop x64.
Подразумевается, что у Вас уже есть исходники какого-либо проекта.
Все настройки, касающиеся конкретного железа (в моём случае это контроллер STM32F429 и девборда STM32F429DISCO), нужно подменить на свои. То же самое касается и путей.
Если готовы, то


Очень трудно передать весь восторг, который сопутствовал запуску первых программ и исправлению первых ошибок с использованием этого языка. Прост и красив как Python, немножко похож на Fortran, удобная работа с массивами и графиками, а также возможность осуществлять лютую оптимизацию и распараллеливание даже для таких чайников, как я мои одногруппники. Можно работать на разных уровнях абстракции: от высокоуровневого программирования с динамической типизацией можно спуститься до ассемблерных команд, то есть, тут вам и питонская общедоступность и скорость выполнения фортрановских считалок. Не могу отделаться от ощущения, что Mathcad, Scilab и даже, прости Господи, C++ начинают в моем сердце уходить на второй план.
В этой статье мы создадим модель регулятора на базе стандартной библиотеки структурного моделирования (без использования готовой библиотеки блоков нечёткого регулирования).
В качестве объекта управления будет использована модель газотурбинного двигателя из учебника В.И. Гостева «Нечеткие регуляторы в системах автоматического управления»
Выполним сравнение с ПИД и ПДД регуляторами.
{kind=link}