О чем эта статья
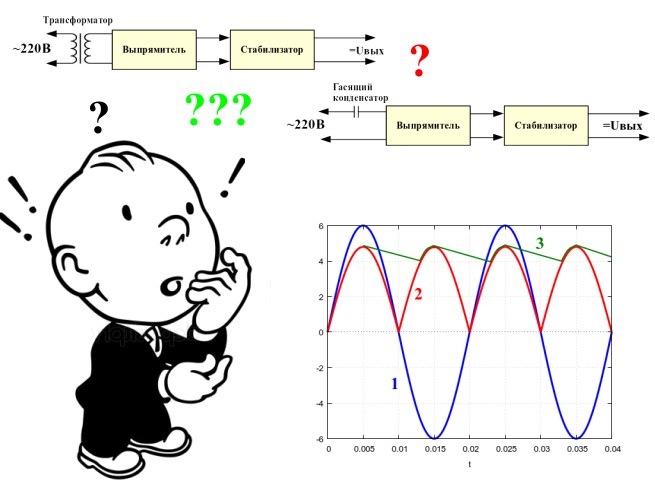
В этой статье рассказано о принципах построения простейших бестрансформаторных источников питания.Тема не новая, но, как показал опыт, не всем известная и понятная. И даже, некоторым, интересная.
Прошу желающих и интересующихся читать, критиковать, уточнять и дополнять на почту
shiotiny@yandex.ru или на мой
сайт в раздел «Контакты».
Вступление
Не так давно один мой знакомый влез пальцами в некую схему, которую собирался починить (проводок отвалился — так что просто припаять его надо было на место). И его ударило током. Не сильно ударило, но ему хватило, чтобы удивиться: «как так — тут микроконтроллер стоит, что тут может стукнуть? Он же от 5 вольт питается!».
Его удивление быстро разъяснилось: схема оказалась с бестрансформаторным питанием и без гальванической развязки от сети.
Далее последовали вопросы уже в мою сторону. Сводились они к двум вещам: «А чё? Так можно делать?!» и «А как оно работает?».
Хотя я и не считаю себя экспертом в электронике, но делать подобные блоки питания мне приходилось. Так что пришлось взять ручку и листок и объяснить как оно работает. Благо это совсем не сложно.
Возможно, что и вам покажется интересной тема «бестрансформаторных» источников питания или, сокращённо,
БИП. Кому-то для общего развития, а кому-то и для практического применения.