Я собрал умную коробку для круглогодичного выращивания клубники у себя на балконе. Расскажу как сделал управление освещением, поливом, отоплением, какие датчики использовал, с какими проблемами столкнулся и покажу результат.

leadlead, why not?
Я собрал умную коробку для круглогодичного выращивания клубники у себя на балконе. Расскажу как сделал управление освещением, поливом, отоплением, какие датчики использовал, с какими проблемами столкнулся и покажу результат.





В процессе чтения неплохого поста про американскую SLS наткнулся на цитату из документа, на который часто ссылаются в постах про Space Shuttle, но целиком на русском я его найти не смог - особое мнение Ричарда Фейнмана в составе комиссии по расследованию катастрофы шаттла "Челленджер" в 1986 году.
Решил сделать перевод для Хабра; все совпадения с сегодняшними инженерными практиками случайны (грустный вздох).

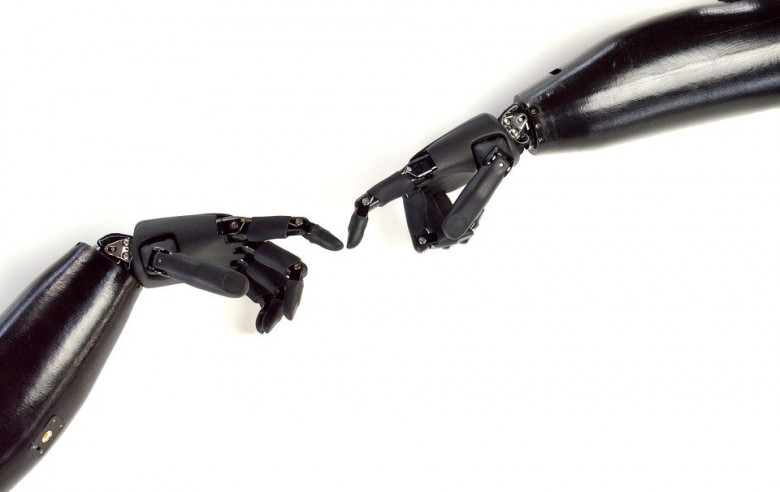
Протезы в искусстве фигурируют ну очень часто, и в большинстве своём они могут вводить в заблуждение о том, что уже вот прямо сейчас протезы куда лучше наших с вами биологических рук, однако, это лишь заблуждение. Однако, при хоть сколько то серьёзном ознакомлении можно столкнуться с фактом того, что текущие протезы далеки от настоящей замены рук, а по факту являются лишь инструментом. Они не служат настоящей заменой рукам, и в этой статье я расскажу что они всё-таки могут, какие протезы есть сейчас на рынке, и какие сложности возникают на поприще этих технологических разработок.
Есть несколько видов протезов, под разные типы ампутаций руки. Для начала, разберёмся с видами ампутации.

Перед вами первая (в истории?) фотография Юпитера и его спутников, сделанная на ТЕЛЕФОН без использования дополнительных оптических средств, таких как телескоп или внешние объективы. Только штатив, только хардкор.

Не так давно на Хабре вышла новость о разработке червеобразных мягких роботов, которые легко меняют форму и длину для проникновения в труднодоступные места. Подобный робот – не только миниатюрное, но и высокотехнологичное устройство, оснащенное датчиками и серьезно адаптирующее свои функции к меняющимся условиям окружающей среды. Такое бионическое направление развития робототехники логично и ожидаемо, но, в то же время, оно перекликается с не менее интересным феноменом модульной робототехники. Модульный робот автоматически собирается из относительно простых единиц, которые могут сами добираться до точки стыковки, ориентируясь на разметку в помещении, например, на складе.
Интересующимся модульной робототехникой я рекомендую посмотреть диссертацию и научные работы Никиты Павлюка, познакомившего меня с этой темой. Здесь я затрону тему модульных роботов лишь в качестве контекста, подчеркнув их важнейшую черту – способность к реконфигурации. Шагом вперед от реконфигурации мне видится реализация приемов оригами в робототехнике, о чем я и расскажу далее.