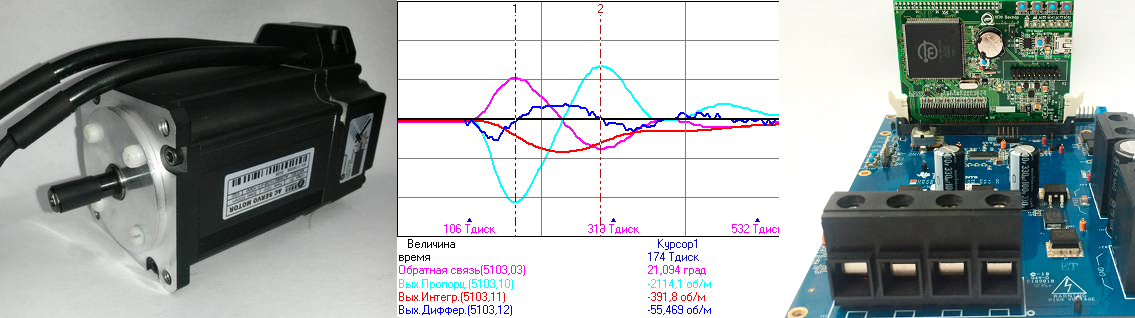
После выхода предыдущих статьей о векторном управлении электродвигателями поступило много вопросов о позиционном приводе – как приводом отрабатывать заданное положение? Как работает сервопривод в современных станках, как использовать сигнал с датчика положения, чем отличается шаговый привод от сервопривода с подчиненным регулированием? Давайте всё покажу в виде картинок и видео.
Про промышленные программируемые контроллеры Ace компании Velocio я уже писал на примере модели Ace3090v5. В этот раз хочу рассказать про новую модель Ace7096v10:
За одно повышу в статусе Ace с «маленького ПЛК» до «самого маленького ПЛК в мире»- за время, прошедшее с предыдущей публикации, я не смог найти более компактного промышленного контроллера. Все ПЛК Velocio серии Ace вне зависимости от количества входов, выходов и портов связи имеют одинаковые размеры 2.5''*2.5''.
Привет habr! Каждый будущий инженер в процессе изучения сетевых технологий знакомится с протоколом ARP (Address Resolution Protocol, далее ARP). Основная задача протокола – получить L2 адрес устройства при известном L3 адресе устройства. На заре профессиональной карьеры начинающий специалист, как мне кажется, редко сталкивается с ситуациями, когда нужно вспомнить про существование ARP. Создаётся впечатление, что ARP – это некоторый автономный сервис, не требующий никакого вмешательства в свою работу, и при появлении каких-либо проблем со связью многие по неопытности могут забыть проверить работу ARP.
Существует несколько популярных securty дистрибутивов, содержащих большинство популярных утилит и приложений для проведения тестирования на проникновение. Обычно они основаны на существующих Linux-дистрибутивах и представляют из себя их переработанные версии. В этой статье будут представлены наиболее известные из них.