Простой и популярной реализацией закона управления обратным маятником является PID регулятор. Современные средства настройки коэффициентов PID регулятора позволяют решать подобные задачи нажатием пары кнопок даже без знания математики, физики и вообще без каких-либо технических знаний. Рассмотрим пример настройки PID регуляторов в Simulink для классического обратного маятника.
Объект управления (Plant)
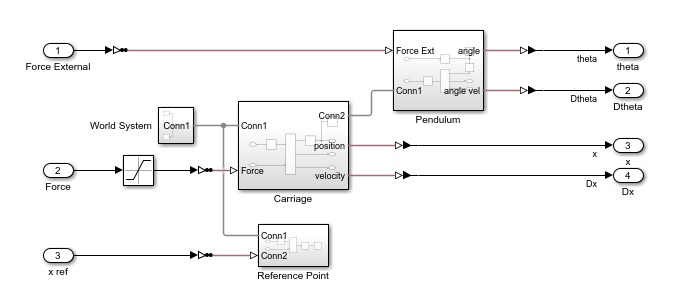
Модель перевернутого маятника соберем в библиотеке Multibody. Для этого нам не понадобится знание физики и математики. Библиотека Multibody предоставляет нам готовые блоки степеней свободы, твердых тел, преобразований координат, которые нужно только верно соединить. Собираем подсистемы отдельно для маятника и отдельно для тележки, и собираем все вместе. Результат на рисунке, модель в прикрепленных файлах.