Навигация по лесу
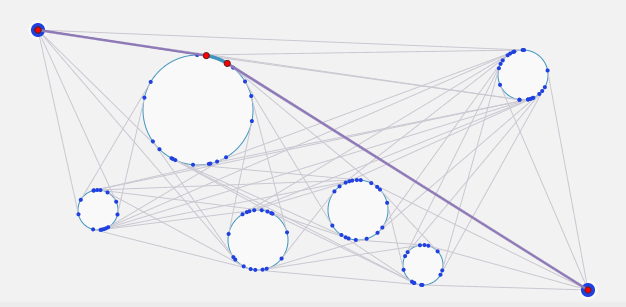
Алгоритм поиска пути A* — это мощный инструмент для быстрой генерации оптимальных путей. Обычно A* демонстрируют при навигации по картам из сеток, но он может использоваться не только для сеток! Он может работать с любыми графами. Можно использовать A* для поиска пути в мире круглых препятствий.
В оригинале статьи все изображения интерактивны.
Как один алгоритм решает обе эти задачи? Давайте начнём с краткого описания того, как работает A*.
Алгоритм A*
Алгоритм A* находит
оптимальный путь из начальной в конечную точку, избегая по дороге препятствия. Он реализует это, постепенно расширяя множество
частичных путей. Каждый частичный путь — это серия шагов от начальной точки до какой-то промежуточной точки на дороге к цели. В процессе работы A* частичные пути становятся всё ближе конечной точке. Алгоритм прекращает работу тогда, когда находит полный путь, который лучше оставшихся вариантов, и это можно доказать.
На каждом шаге алгоритма A* оценивает множество частичных путей и генерирует новые пути, расширяя наиболее многообещающий путь из множества. Для этого A* хранит частичные пути в очереди с приоритетами, отсортированном по
приблизительной длине — истинной измеренной длине пути плюс примерное оставшееся расстояние до цели. Это приближение должно быть
недооценкой; то есть приближение может быть меньше истинного расстояния, но не больше него. В большинстве задач поиска пути хорошей преуменьшенной оценкой является геометрическое расстояние по прямой от конца частичного пути до конечной точки. Истинный наилучший путь до цели от конца частичного пути может быть длиннее, чем это расстояние по прямой, но не может быть короче.