Использование градиента в качестве фона страницы
12 min
За время существования web 2.0 в сети появились некоторые приемы так называемого web 2.0 дизайна, один из которых это градиент.
Создание подобного эффекта, если не брать в расчет элементы с фиксированной высотой доставляет верстальщику не мало сложностей. Ключевым моментом реализации является оптимизация графики, но с другой стороны слишком "пережатый" файл теряет качество, что особенно заметно при использовании такого элемента с нефиксированной высотой. А что делать если эффект градиента необходимо использовать в фоне страницы ?
Создание подобного эффекта, если не брать в расчет элементы с фиксированной высотой доставляет верстальщику не мало сложностей. Ключевым моментом реализации является оптимизация графики, но с другой стороны слишком "пережатый" файл теряет качество, что особенно заметно при использовании такого элемента с нефиксированной высотой. А что делать если эффект градиента необходимо использовать в фоне страницы ?
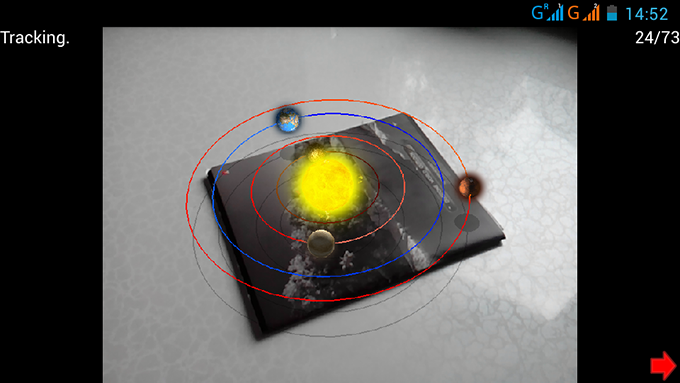
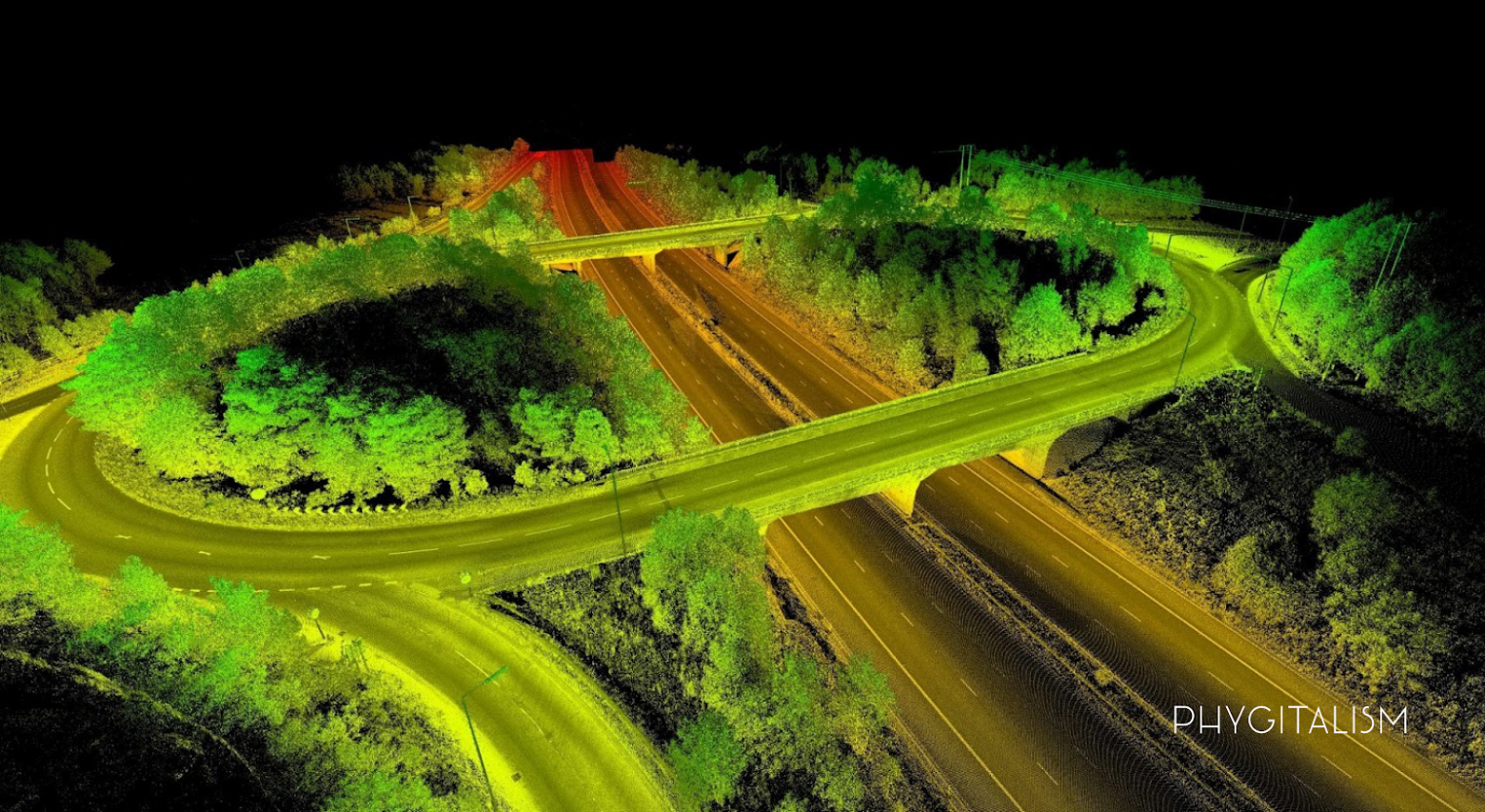
 Хочу рассказать об известном, но мало освещенном в литературе подходе к слежению за множеством движущихся объектов. Сложность этой задачи во многом заключается в том, что алгоритмы обнаружения и выделения объектов часто дают сбои, а сами объекты могут заслоняться другими объектами и элементами фона.
Хочу рассказать об известном, но мало освещенном в литературе подходе к слежению за множеством движущихся объектов. Сложность этой задачи во многом заключается в том, что алгоритмы обнаружения и выделения объектов часто дают сбои, а сами объекты могут заслоняться другими объектами и элементами фона.


 В настоящей заметке я расскажу о том, как можно построить систему оптического распознавания структурной информации, опираясь на алгоритмы, применяющиеся в обработке изображений и их реализации в рамках библиотеки OpenCV. За описанием системы стоит активно развивающийся open source проект
В настоящей заметке я расскажу о том, как можно построить систему оптического распознавания структурной информации, опираясь на алгоритмы, применяющиеся в обработке изображений и их реализации в рамках библиотеки OpenCV. За описанием системы стоит активно развивающийся open source проект