Здравствуйте! Я много раз слышал как красиво делает Apple внутренности своих продуктов, с инженерной точки зрения. Здесь на хабре не так давно кто-то постил разборку робота-пылесоса «одной китайской компании», не помню какой модели. Я хочу показать на сколько «красивы» пылесосы фирмы iRobot по сравнению с другими производтелями.
Читаем. Осторожно, трафик!
Небольшое уточнение. Идея публикации топика пришла мне неожиданно для меня, во время процесса разборки, когда я уже почти полностью разобрал пылесос. потому в посте я покажу процесс сборки.
В общем поехали…
Это редуктор щеток. Когда я его вскрыл, там все было черное и липкое… все шестерни были замотаны волосами в перемешку со смазкой. Одну шестерню даже немного подточило этими самыми волосами. Как видите, я все промыл и смазал.

Это общий вид блока щеток с редуктором.
Без щеток.

С щетками.

Под щетками находится датчик, назначение которого мне непонятно.
С виду похож на динамик из китайских открыток, но тут целая плата для его работы.

Он же, установленный в корпус.

Такс, блок с щетками собран.
Теперь начнем собирать сам пылесос. Для начала устанавливаем материнскую плату в корпус.
Плата с верхней стороны.
По видимому производитель использует один вид платы для всей линейки пылесосов, напаивая в зависимости от функционала дополнительные электронные элементы.
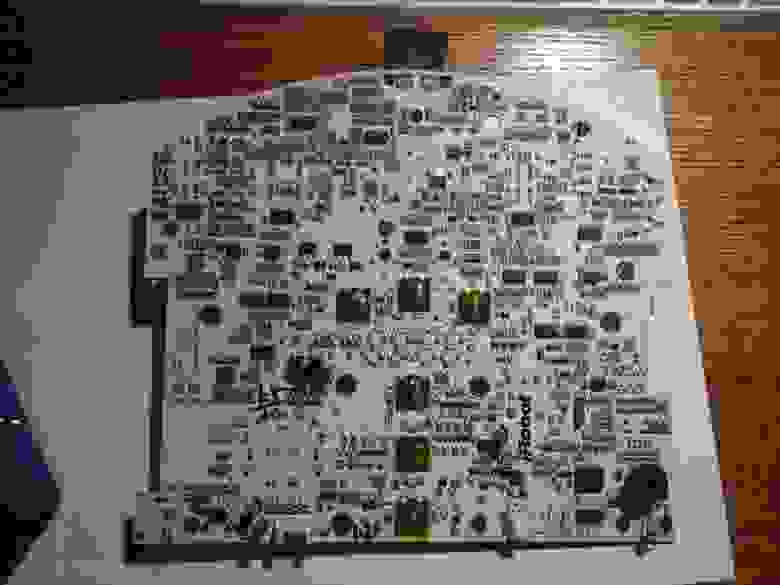
Она же с нижней.

Процессов здесь установлен, судя по надписям на корпусе, ARM. К сожалению, отснятые фото я просмотрел лишь когда полностью собрал пылесос. Потому невозможность прочесть маркировку заметил поздно. За это прошу прощения.

Ну, продолжим собирать. Для начала установим на место металлический экран, который, судя по всему, защищает управляющую электронику от наводок двигателей пылесоса.

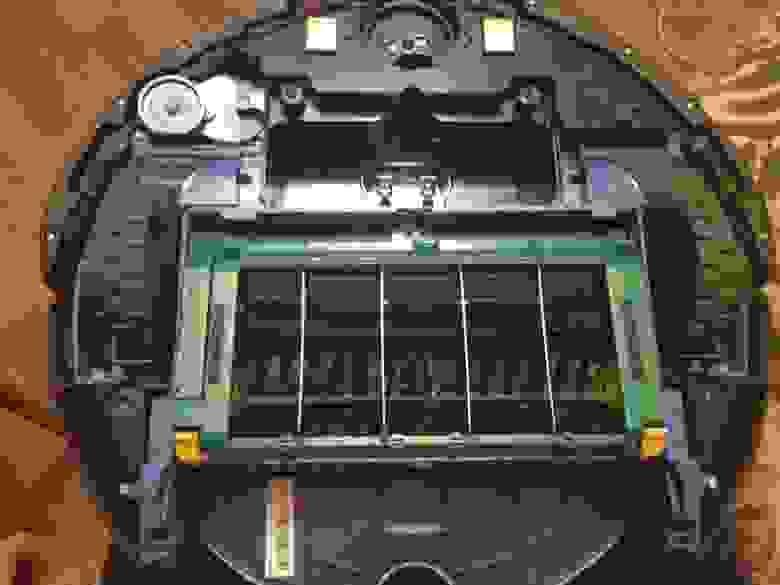
Это обратная сторона пустого корпуса.

Это рамка с инфракрасными датчиками, которые устанавливаются за бампером пылесоса.

Здесь датчики крупным планом. Их на самом деле больше, по всей длине рамки.

Подключаем все датчики и двигатели к материнской плате.

Прикручиваем плату к корпусу.

Устанавливаем блок с кнопками и индикаторами.
Закрываем накладкой с обозначениями индикаторов.
Накрываем его декоративной/защитной крышкой.
Здесь я уже закрыл корпус и установил бампер. Процесс не трудный, ничего интересного.
Такс, тепер устанавливаем рабочие механизмы.
Начнем с двигателя щетки-пропеллера.

Устанавливаем. Привинчиваем.

Теперь модуль правого колеса.


Далее блок щеток.

Установили.
Ну и наконец батарея. Она здесь довольно большая. С удобными лямками для её вынимания.

Кстати, она тут Никель-Метал-Гидридная. На 3000 мА*ч.

Нижняя сторона батареи с контактной площадкой.

Поставили.

Осталось закрыть все крышкой.

Кстати вращение переднего колеса тоже контролируется датчиком. Если вращения нет, значит мы застряли и надо запускать меры по выпутыванию из сложившейся ситуации.

Устанавливаем блок переднего колеса.

Просто вставляется и слегка защелкивается.

Ну и само колесо. Кстати, оно разных цветов именно для датчика.

Прикручиваем щётку-пропеллер.

Сделано.

Осталось установить мусоросборник.

Готово.

Вот я и собрал полностью пылесос.
На материнской плате имеется порт, похожий на PS/2. Скорее всего для перепрошивки пылесоса. Хотелось бы узнать у читателей, может кто проделывал со своим пылесосом такое?
За качество фоток прошу прощения, фотографирую практически впервые в жизни. Да и к тому же на телефон. =)
Надеюсь мой пост кому-нибудь был интересен.
Спасибо за Внимание!
Читаем. Осторожно, трафик!
Небольшое уточнение. Идея публикации топика пришла мне неожиданно для меня, во время процесса разборки, когда я уже почти полностью разобрал пылесос. потому в посте я покажу процесс сборки.
В общем поехали…
Это редуктор щеток. Когда я его вскрыл, там все было черное и липкое… все шестерни были замотаны волосами в перемешку со смазкой. Одну шестерню даже немного подточило этими самыми волосами. Как видите, я все промыл и смазал.

Это общий вид блока щеток с редуктором.
Без щеток.

С щетками.

Под щетками находится датчик, назначение которого мне непонятно.
С виду похож на динамик из китайских открыток, но тут целая плата для его работы.

Он же, установленный в корпус.

Такс, блок с щетками собран.
Теперь начнем собирать сам пылесос. Для начала устанавливаем материнскую плату в корпус.
Плата с верхней стороны.
По видимому производитель использует один вид платы для всей линейки пылесосов, напаивая в зависимости от функционала дополнительные электронные элементы.

Она же с нижней.

Процессов здесь установлен, судя по надписям на корпусе, ARM. К сожалению, отснятые фото я просмотрел лишь когда полностью собрал пылесос. Потому невозможность прочесть маркировку заметил поздно. За это прошу прощения.

Ну, продолжим собирать. Для начала установим на место металлический экран, который, судя по всему, защищает управляющую электронику от наводок двигателей пылесоса.

Это обратная сторона пустого корпуса.

Это рамка с инфракрасными датчиками, которые устанавливаются за бампером пылесоса.

Здесь датчики крупным планом. Их на самом деле больше, по всей длине рамки.

Подключаем все датчики и двигатели к материнской плате.

Прикручиваем плату к корпусу.

Устанавливаем блок с кнопками и индикаторами.

Закрываем накладкой с обозначениями индикаторов.

Накрываем его декоративной/защитной крышкой.

Здесь я уже закрыл корпус и установил бампер. Процесс не трудный, ничего интересного.

Такс, тепер устанавливаем рабочие механизмы.
Начнем с двигателя щетки-пропеллера.

Устанавливаем. Привинчиваем.

Теперь модуль правого колеса.


Далее блок щеток.

Установили.

Ну и наконец батарея. Она здесь довольно большая. С удобными лямками для её вынимания.

Кстати, она тут Никель-Метал-Гидридная. На 3000 мА*ч.

Нижняя сторона батареи с контактной площадкой.

Поставили.

Осталось закрыть все крышкой.

Кстати вращение переднего колеса тоже контролируется датчиком. Если вращения нет, значит мы застряли и надо запускать меры по выпутыванию из сложившейся ситуации.

Устанавливаем блок переднего колеса.

Просто вставляется и слегка защелкивается.

Ну и само колесо. Кстати, оно разных цветов именно для датчика.

Прикручиваем щётку-пропеллер.

Сделано.

Осталось установить мусоросборник.

Готово.

Вот я и собрал полностью пылесос.

На материнской плате имеется порт, похожий на PS/2. Скорее всего для перепрошивки пылесоса. Хотелось бы узнать у читателей, может кто проделывал со своим пылесосом такое?
За качество фоток прошу прощения, фотографирую практически впервые в жизни. Да и к тому же на телефон. =)
Надеюсь мой пост кому-нибудь был интересен.
Спасибо за Внимание!
