
Две недели в Хакспейсе гостил симпатичный корейский робот iRobi(q) от компании Yujin, которая производит роботы-пылесосы iClebo Arte (для каждого желающего), роботы-сиделки (для медицинских целей), роботов-саперов (для военных), роботов-нянь и роботов-учителей (для детишек).
Примечательно, что метод одновременной навигации и составления карты (SLAM от англ. Simultaneous Location and Mapping) у всех роботов фирмы Yujin практически одинаковый (так что можно купит себе пылесос, чтобы понять как работает военный робот).
Под катом короткое описание линейки роботов фирмы Yujin, немного забавных приключений улыбающегося робота в Хакспейсе и несколько фоток того, что внутри у этого робота-воспитателя.
SLAM

SLAM — Simultaneous Localization And Mapping — Метод одновременной навигации и построения карты — метод, используемый роботами и автономными транспортными средствами для построения карты в неизвестном пространстве или для обновления карты в заранее известном пространстве с одновременным контролем текущего местоположения и пройденного пути.
Метод одновременной навигации и построения карты (SLAM) — это концепция, которая связывает два независимых процесса в непрерывный цикл последовательных вычислений, при котором результаты одного процесса участвуют в вычислениях другого процесса.
Построение карты — это проблема интеграции информации, собранной с датчиков робота. При этом процессе, робот как бы отвечает на вопрос: «Как выглядит мир?»
Главными аспектами в построении карты являются представление данных об окружающей среде и интерпретация данных датчиков.
Напротив, локализация — это проблема определения местоположения робота на карте. При этом, робот как бы отвечает на вопрос «Где я?»
Локализацию можно разделить на два вида — локальная и глобальная.
Локальная локализация позволяет отследить местоположение робота на карте, когда его начальное местоположение известно, а глобальной локализация — это определение местоположения робота на незнакомом месте (например, при похищении робота).
Перед роботом стоит задачи: а) построения карты и б) локализации робота на этой карте. На практике, эти две задачи не могут быть решены независимо друг от друга. Прежде чем робот сможет ответить на вопрос о том, как выглядит окружающая среда (исходя из серии наблюдений), он должен знать, где эти наблюдения были сделаны. В то же время, трудно оценить текущее положение робота без карты.
Вот и выходит, что SLAM является типичной проблемой курицы и яйца: карта необходима для локализации, а локализация необходима для создания карты.
SLAM реализуется при помощи нескольких технологий: одометрии (данные с колес робота), 1d- и 2d- лазерных дальнометров, 3D High Definition LiDAR, 3D Flash LIDAR, 2d- и 3d-сонаров, одной или нескольких 2d-видеокамер. Есть так же тактильные системы SLAM (регистрируют прикосновения), радарные SLAM, wifi-SLAM. (Есть и экзотика FootSLAM)
Статьи на Хабре по данной тематике
В MIT разработали систему построения карт в реальном времени для спасателей;
Что роботу стоит карту построить?;
Тест роботов-пылесосов: iRobot Roomba 780, Moneual MR7700, iClebo Arte и Neato XV-11.
Обучающее видео
Компания Yujin
Yujin была основана в 1988 для промышленных и военных целей
Линейка роботов

Робот-сапер(минер?)

еще фотки военного робота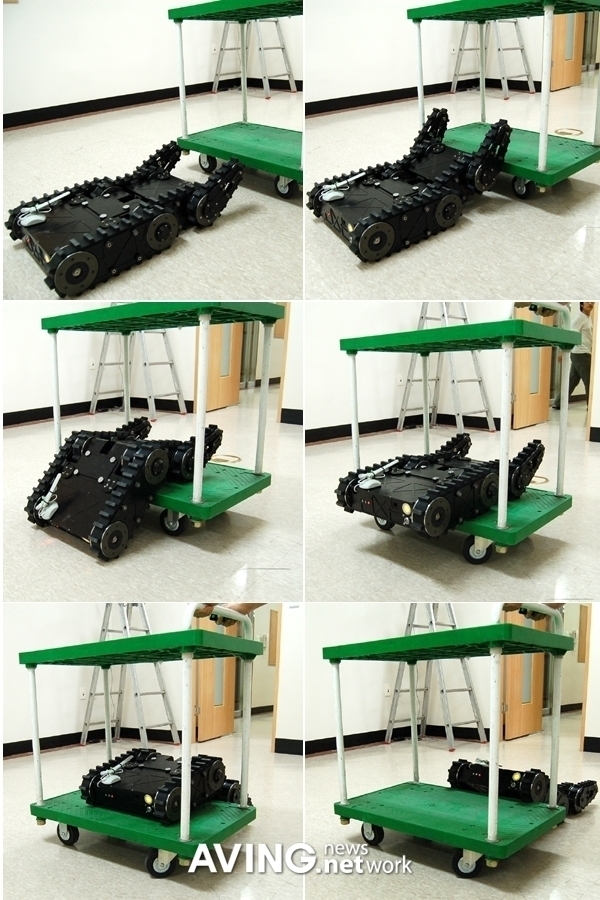





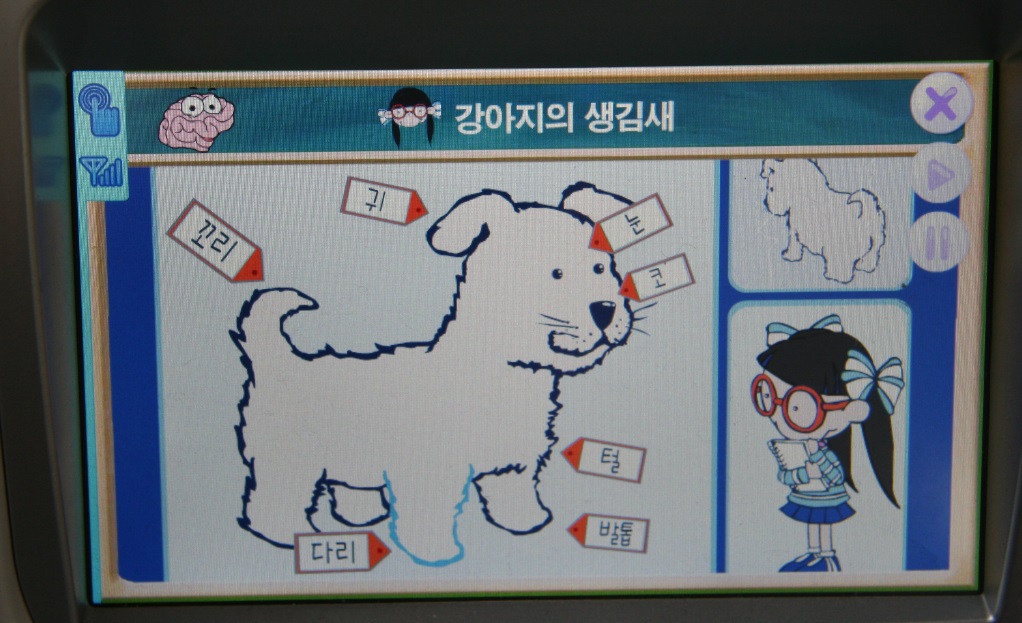
Робот-учитель

Интерактивное обучение произношению + персонаж
Роботизированный инвалидные кресла

Cafero — робот официант

(Вместо чаевых принимает батарейки)
GoCart робот-носильщик

Для гостиничной и отрасли и здравоохранения
iRobi
ТТХ

Заряд батареи 3 часа
7-ми дюймовый WVGA тачскрин
Распознавание голоса
1.3 мегапиксельная камера
40 Гб жесткий диск (для караоке)
Стоимость — $4,598
2000 корейских детских садиков было оснащено подобными роботами
(сейчас детские садики, наверное, оснащают игрой League of Legends)
Сколько любви в глазах и робкий румянец:

Фичи
Video recognition (Camera)
Робот может распознавать изображения и реагировать на лица или действия
Voice recognition (Microphone)
Распознание голоса
Emotion expression (Face LED)
Робот может «выражать» 5 эмоций светодиодами (очи, уста и ланиты)
Obstacle detection (Ultrasound sensor)
Ультразвуковое обнаружение препятствий. Робот приостанавливается если обнаружит на своем пути человека или препятствии.
Audio playback (Speaker)
Робот разговаривает и играет музыку
Display & touch screen
(Сейчас уже тачскрином никого не удивишь, а в 2007м это было круто)
Close obstacle detection (IR sensor)
ИК-датчик чтоб избегать препятствий
Fall prevention (Floor detection sensor)
Избежание падений. Робот останавливается перед лестницей и «обрывами» (в нашем случае он уберег себя от падения со стола)
Collision detection (Bumper sensor)
Бампер оснащен датчиками касания. При срабатывании робот останавливается
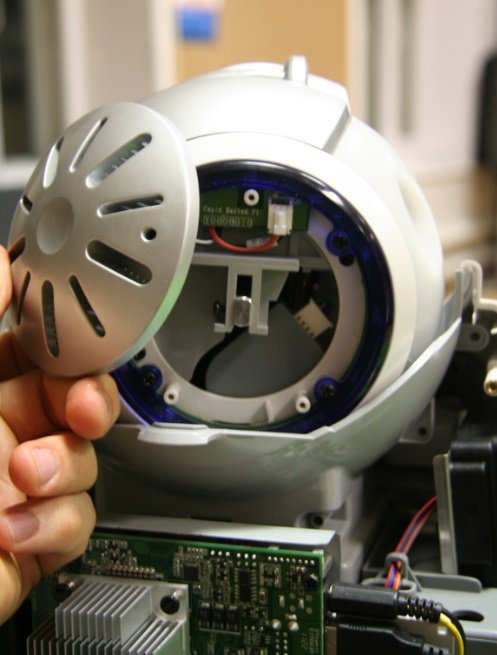
Робот оснащен камерой для построения карты помещения. С ее помощью он сканирует потолок, производя до 24 кадров в секунду, для формирования точной структуры комнаты, определения стыков стен и расположения перегородок.
Устройство:
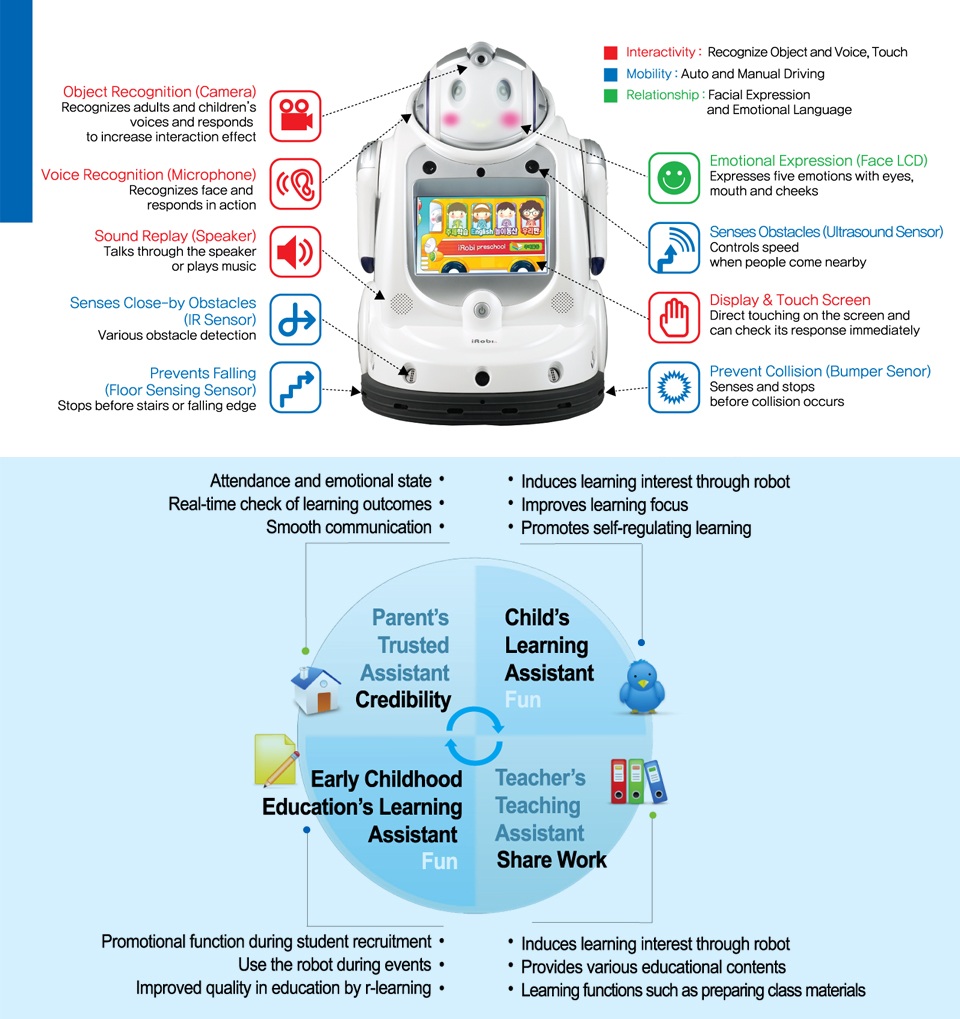
Сферы применения
Меню подключения к интернет:
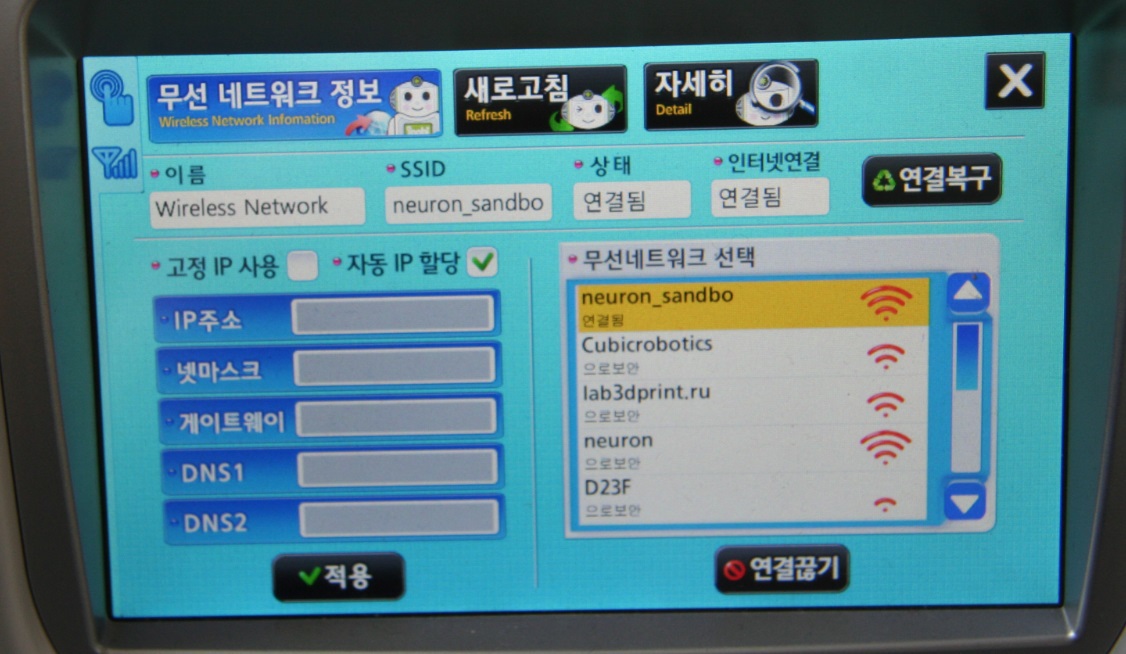
Прокачиваем навык полного перебора всех кнопочек и изучение корейского языка методом тыка
Главное меню:

Верхние два ряда действий требуют подключения к интернет, нижние — автономны. Похоже что где-то на серваке(облаке?) создается ваша учетная запись и возможно даже что был человек-консультант
Фотографирует тебя, когда ты фотографируешь его.

Фотография происходит когда ты прикасаешься к его руке.
С такой училкой быстро выучишь корейский.
(Глазастый мозг порадовал)
Ох уж эти корейские культурные коды:

(Игра на развитие памяти)
Режим караоке:

(Пока играет корейская песня, робот при этом ездит и машет руками)
Рефлексия:

«Теория лжи» Пола Экмана работает и для роботов:

Внутренности

«Люк, я твой отец»
Куда ж без нее

Под мышкой — жесткий диск
Тачскрин с обратной стороны:

Спина:
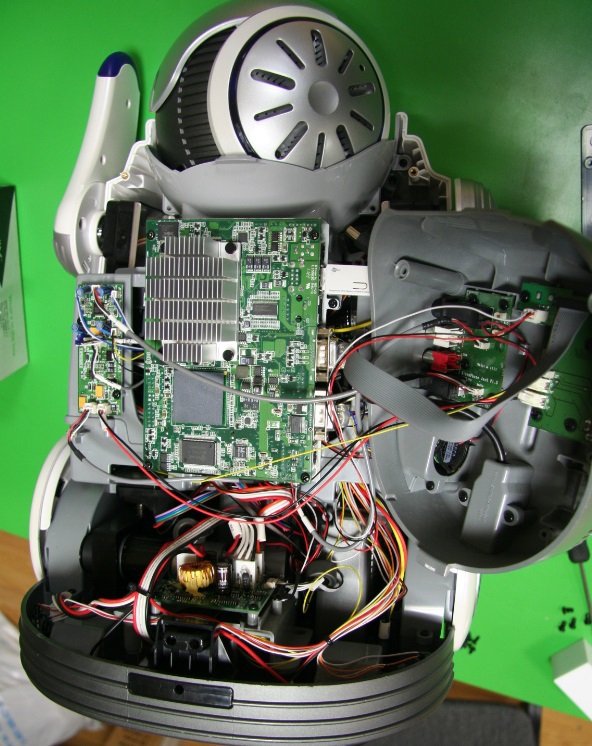
Модуль Wi-Fi:

В голову глубоко не полез, снял ухо и заглянул — там моторчики и провода от камеры:
ИК-датчик:

Забавные случаи
Однажды, с криком «Хочу жрать, розетка я иду тебя искать» (говорил он по-английски, перевод примерный), робот рванулся навстречу приключениям, а так как он стоял на столе, мы поняли, что вот сейчас оно и произойдет… Но нет, он доехал до края, робко высунулся на пару сантиметров, сказал «Да ну вас нафиг» (перевод не дословный, но смысл примерно такой), перешел в спящий режим.
Когда я засовывал робота в ящик, незаметно для себя нажал на клавишу «Вкл», а так как он загружается секунд 20-30, то я спокойно продолжил его упаковывать, но тут вдруг он ожил, зашевелил ручками и стал что-то бормотать. У меня аж сердце сжалось, сразу вспомнил как пихал котенка в сумку.
Прав был Азимов, что у человечества будут проблемы с эмоциональным восприятием роботов.
Only registered users can participate in poll. Log in, please.
Стоит ли создать подобный вариант русскоязычного робота для обучения детей?
61.24% Да79
22.48% Нет29
13.18% Не знаю17
3.1% Я его уже создаю4
129 users voted. 20 users abstained.
