Шел мелкий и противный дождь. Настроение было гнусным.
Он лежал на обочине и тихо ржавел. Рядом на столбе сверкал огнями молодой собрат.
Я остановился и положил его в багажник.
Я уже не один.
И он не один.
Привез на дачу, разобрал, отмыл от грязи и покрасил из баллончика.
Применение нашлось сразу. Новая машина оказалась шире предыдущей и заезд в гараж стал более проблематичным. Всякие «колокольчики-на-веревочках» — это не для нас. Итак – стационарный парктроник.
1. Широко распространенные ультразвуковые датчики HC-SR04. 2 штуки, по одному на каждую стенку. В интернете полно информации о них. Описание ниже.
Ultrasonic Ranging Module HC — SR04
Ultrasonic ranging module HC — SR04 provides 2cm — 400cm non-contact measurement function, the ranging accuracy can reach to 3mm. The modules includes ultrasonic transmitters, receiver and control circuit. The basic principle of work:
Using IO trigger for at least 10us high level signal.
The Module automatically sends eight 40 kHz and detect whether there is a pulse signal back.
IF the signal back, through high level, time of high output IO duration is the time from sending ultrasonic to returning.
Test distance = (high level time × velocity of sound (340M/S) / 2
5V Supply
Trigger Pulse Input
Echo Pulse Output
0V Ground
Working Voltage DC 5 V
Working Current 15mA
Working Frequency 40Hz
Max Range 4m
Min Range 2cm
Measuring Angle 15 degree
Trigger Input Signal 10uS TTL pulse
Echo Output Signal Input TTL lever signal and the range in proportion
Dimension 45*20*15mm

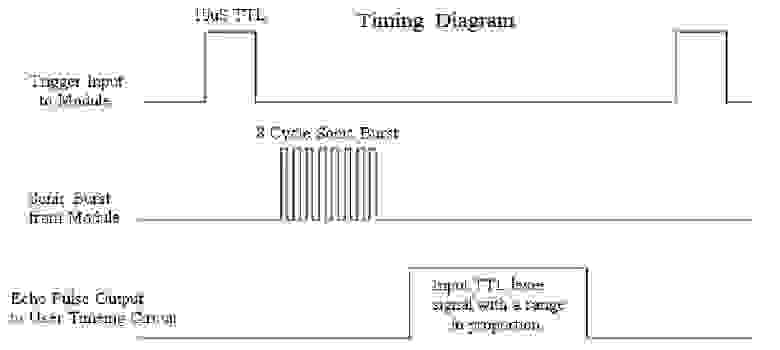
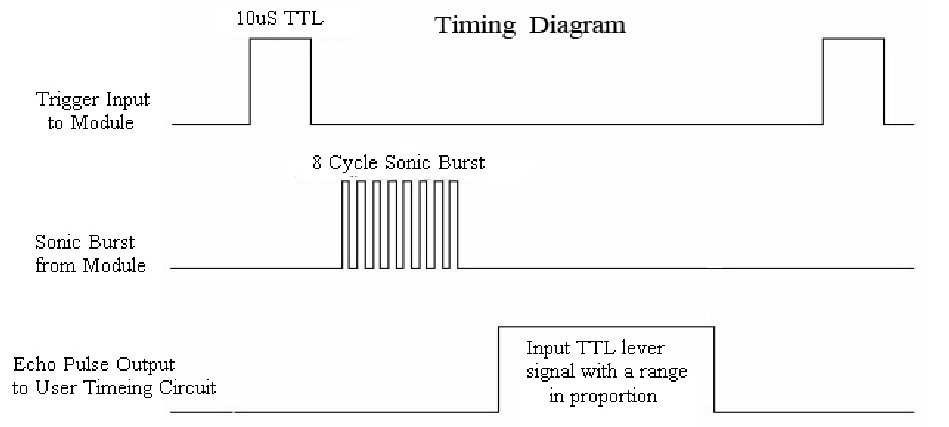
The Timing diagram is shown below. You only need to supply a short 10uS pulse to the trigger input to start the ranging, and then the module will send out an 8 cycle burst of ultrasound at 40 kHz and raise its echo. The Echo is a distance object that is pulse width and the range in proportion .You can calculate the range through the time interval between sending trigger signal and receiving echo signal. Formula: uS / 58 = centimeters or uS / 148 =inch; or: the range = high-level time * velocity (340M/S) / 2; we suggest to use over 60ms measurement cycle, in order to prevent trigger signal to the echo signal.
Закреплены на боковых стенках на въезде в гараж с помощью полосок из оцинкованной жести. Крепление должно позволить отрегулировать датчики «по месту» в зависимости от габаритов авто (высота, ширина капота, форма крыльев…).

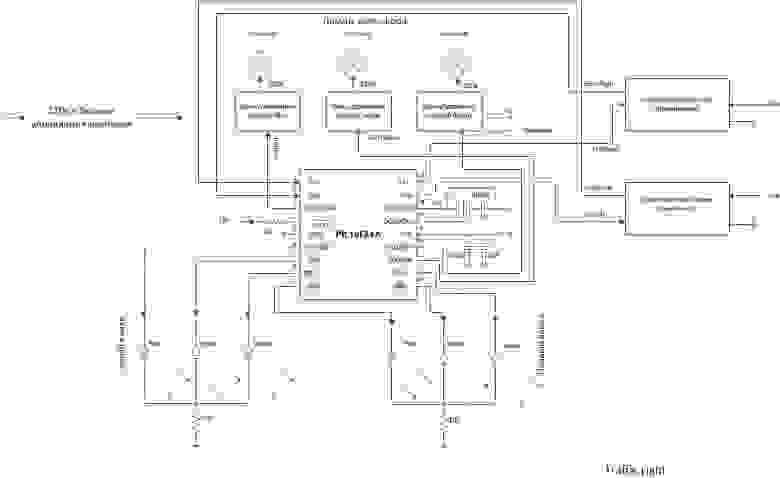
2. Контроллер – PIC16f84a. Почему этот:
а) их есть у меня;
б) у него 2 порта ввода-вывода, суммарно 13 разрядов, как раз столько и надо. 3шт. – управление светофором (Красный – Желтый – Зеленый), 6шт. – левый и правый светодиоды (К-Ж-З), 2шт. – импульс локации (Trig) на левый и правый датчики, 2шт. – отраженный импульс (Echo) от левого и правого датчиков.
3. Два трехцветных светодиода, по одному на каждую стенку. Светодиодов Красный – Желтый – Зеленый не нашел. Может и не бывает их, а может плохо искал. Поэтому роль желтого у светодиодов играет синий цвет. Для полной идентичности, конечно, можно было использовать раздельные светодиоды. И не было бы с желтым проблем. Но такой компромисс я счел допустимым.

4. Блоки управления лампами светофора. 3шт., по одному на каждую лампу.
Идеально подходит блок управления включением-выключением телевизора.

Состоит из маломощного силового трансформатора (220 в 7 вольт), диодного выпрямителя, стабилизатора на КР142ЕН5х (или аналог), транзисторного ключа и реле. При подаче на вход логической «1» ключ открывается, реле срабатывает и 220в подается на выход. Кроме того, поскольку КРЕН обеспечивает стабилизированные 5в, от одного из этих блоков резонно запитать микроконтроллер. Их полно на любом радиорынке. Если кого-то раздражает щёлканье реле, несложно сделать схему на тиристорах.
5. Кварцевый резонатор на 4мгц.
Это весьма удобная частота для тех микроконтроллеров, что у меня есть. Легко считать временны́е параметры. Период тактовых импульсов = 250нс, машинный цикл состоит из четырех тактов, следовательно, равен 1мкс. Команды в RISC-контроллерах выполняются за 1 или 2 машинных цикла, так что с вычислением времени, которое пройдет «от того, как…до того, как» проблем нет. Можно использовать другой в пределах допустимых частот, но придется пересчитывать таймауты. Это совсем небольшая проблема.
6. Несколько резисторов и конденсаторов, рекомендуемых типовой схемой включения PIC16f84a и два токоограничивающих резистора для светодиодов. Даташит смотреть, например, здесь: ссылка.
Общий вид собранного девайса:


Плата с микроконтроллером:

Простой, практически линейный. По включении питания проводится тест аппаратуры. Якобы тест, больше для красоты. С интервалом в 1сек переключаются красный-желтый-зеленый, затем с тем же интервалом три раза включаются все лампы светофора. После этого — переход к бесконечному циклу опроса левого и правого каналов. При проходе каждого канала, в зависимости от полученного результата, устанавливается соответствующий бит (флаг) PORTB и включается один из светодиодов данного канала. По окончании полного цикла производится анализ состояния флагов Red-Yellow-Green обоих каналов и на основании этого включается соответствующая лампа светофора. Таблица истинности выглядит так:
Любой канал Красный. Светофор — Красный.
Оба канала Зеленый. Светофор — Зеленый.
Все остальные случаи. Светофор — Желтый.
В нескольких словах сердцевина алгоритма «по шагам»:
1. Формируем импульс Trig;
2. Ожидаем прихода ответного импульса Echo;
3. Запускаем таймаут 1ms;
4. По истечении таймаута проверяем есть ли еще «лог.1» на входе Echo;
5. Если нет, значит мы на опасном приближении к датчику соответствующего канала. Включаем красный флаг данного канала и переходим на другой канал;
6. Если Echo еще есть, повторяем п.п.3 и 4;
7. Если нет, значит мы на среднем удалении от датчика. Включаем желтый флаг и переходим на другой канал;
8. Если Echo еще есть, значит мы далеко. Дожидаемся его окончания, включаем зеленый флаг и переходим на другой канал.
В чем суть? Нам не нужно вычислять точное расстояние до объекта. То есть не надо длительность импульса Echo делить на 58, как указано в описании датчика. Мы, не дальномер строим. Нам нужно узнать всего лишь положение объекта по отношению к двум одинаковым диапазонам расстояний от объекта до датчика. Для этого используется таймаут 1ms (см.п.3), что в итоге дает: 1000µs: 58 = 17см. Итак – ближе 17см – красный, от 17 до 34см – желтый, дальше 34см – зеленый. Меняя константы в подпрограмме “Pause 1ms”, можно варьировать расстояния в зависимости от размеров авто, ширины ворот и навыков вождения.
Листинг микропрограммы приведен ниже. Ассемблер. Константы, кроме тех, что в таймаутах, – в двоичной системе, поскольку устройство, бит-ориентированное. И при отладке или анализе все равно пришлось бы переводить в двоичную систему. Для предотвращения зависаний в программе используется Watchdog Timer.
Автор выражает благодарность своей жене, которая во время реальных испытаний бесстрашно стояла в воротах гаража и следила за тем, чтобы автор не въехал ни левым, ни правым крылом авто в стену на въезде. Если найдутся бесстрашные последователи, желающие повторить проект, автор ответит всем.
Он лежал на обочине и тихо ржавел. Рядом на столбе сверкал огнями молодой собрат.
Я остановился и положил его в багажник.
Я уже не один.
И он не один.
Привез на дачу, разобрал, отмыл от грязи и покрасил из баллончика.
Применение нашлось сразу. Новая машина оказалась шире предыдущей и заезд в гараж стал более проблематичным. Всякие «колокольчики-на-веревочках» — это не для нас. Итак – стационарный парктроник.
Аппаратура
1. Широко распространенные ультразвуковые датчики HC-SR04. 2 штуки, по одному на каждую стенку. В интернете полно информации о них. Описание ниже.
Ultrasonic Ranging Module HC — SR04
Product features:
Ultrasonic ranging module HC — SR04 provides 2cm — 400cm non-contact measurement function, the ranging accuracy can reach to 3mm. The modules includes ultrasonic transmitters, receiver and control circuit. The basic principle of work:
Using IO trigger for at least 10us high level signal.
The Module automatically sends eight 40 kHz and detect whether there is a pulse signal back.
IF the signal back, through high level, time of high output IO duration is the time from sending ultrasonic to returning.
Test distance = (high level time × velocity of sound (340M/S) / 2
Wire connecting direct as following:
5V Supply
Trigger Pulse Input
Echo Pulse Output
0V Ground
Electric Parameter
Working Voltage DC 5 V
Working Current 15mA
Working Frequency 40Hz
Max Range 4m
Min Range 2cm
Measuring Angle 15 degree
Trigger Input Signal 10uS TTL pulse
Echo Output Signal Input TTL lever signal and the range in proportion
Dimension 45*20*15mm

Timing diagram
The Timing diagram is shown below. You only need to supply a short 10uS pulse to the trigger input to start the ranging, and then the module will send out an 8 cycle burst of ultrasound at 40 kHz and raise its echo. The Echo is a distance object that is pulse width and the range in proportion .You can calculate the range through the time interval between sending trigger signal and receiving echo signal. Formula: uS / 58 = centimeters or uS / 148 =inch; or: the range = high-level time * velocity (340M/S) / 2; we suggest to use over 60ms measurement cycle, in order to prevent trigger signal to the echo signal.
Закреплены на боковых стенках на въезде в гараж с помощью полосок из оцинкованной жести. Крепление должно позволить отрегулировать датчики «по месту» в зависимости от габаритов авто (высота, ширина капота, форма крыльев…).
2. Контроллер – PIC16f84a. Почему этот:
а) их есть у меня;
б) у него 2 порта ввода-вывода, суммарно 13 разрядов, как раз столько и надо. 3шт. – управление светофором (Красный – Желтый – Зеленый), 6шт. – левый и правый светодиоды (К-Ж-З), 2шт. – импульс локации (Trig) на левый и правый датчики, 2шт. – отраженный импульс (Echo) от левого и правого датчиков.
3. Два трехцветных светодиода, по одному на каждую стенку. Светодиодов Красный – Желтый – Зеленый не нашел. Может и не бывает их, а может плохо искал. Поэтому роль желтого у светодиодов играет синий цвет. Для полной идентичности, конечно, можно было использовать раздельные светодиоды. И не было бы с желтым проблем. Но такой компромисс я счел допустимым.
4. Блоки управления лампами светофора. 3шт., по одному на каждую лампу.
Идеально подходит блок управления включением-выключением телевизора.
Состоит из маломощного силового трансформатора (220 в 7 вольт), диодного выпрямителя, стабилизатора на КР142ЕН5х (или аналог), транзисторного ключа и реле. При подаче на вход логической «1» ключ открывается, реле срабатывает и 220в подается на выход. Кроме того, поскольку КРЕН обеспечивает стабилизированные 5в, от одного из этих блоков резонно запитать микроконтроллер. Их полно на любом радиорынке. Если кого-то раздражает щёлканье реле, несложно сделать схему на тиристорах.
5. Кварцевый резонатор на 4мгц.
Это весьма удобная частота для тех микроконтроллеров, что у меня есть. Легко считать временны́е параметры. Период тактовых импульсов = 250нс, машинный цикл состоит из четырех тактов, следовательно, равен 1мкс. Команды в RISC-контроллерах выполняются за 1 или 2 машинных цикла, так что с вычислением времени, которое пройдет «от того, как…до того, как» проблем нет. Можно использовать другой в пределах допустимых частот, но придется пересчитывать таймауты. Это совсем небольшая проблема.
6. Несколько резисторов и конденсаторов, рекомендуемых типовой схемой включения PIC16f84a и два токоограничивающих резистора для светодиодов. Даташит смотреть, например, здесь: ссылка.
Общий вид собранного девайса:
Плата с микроконтроллером:
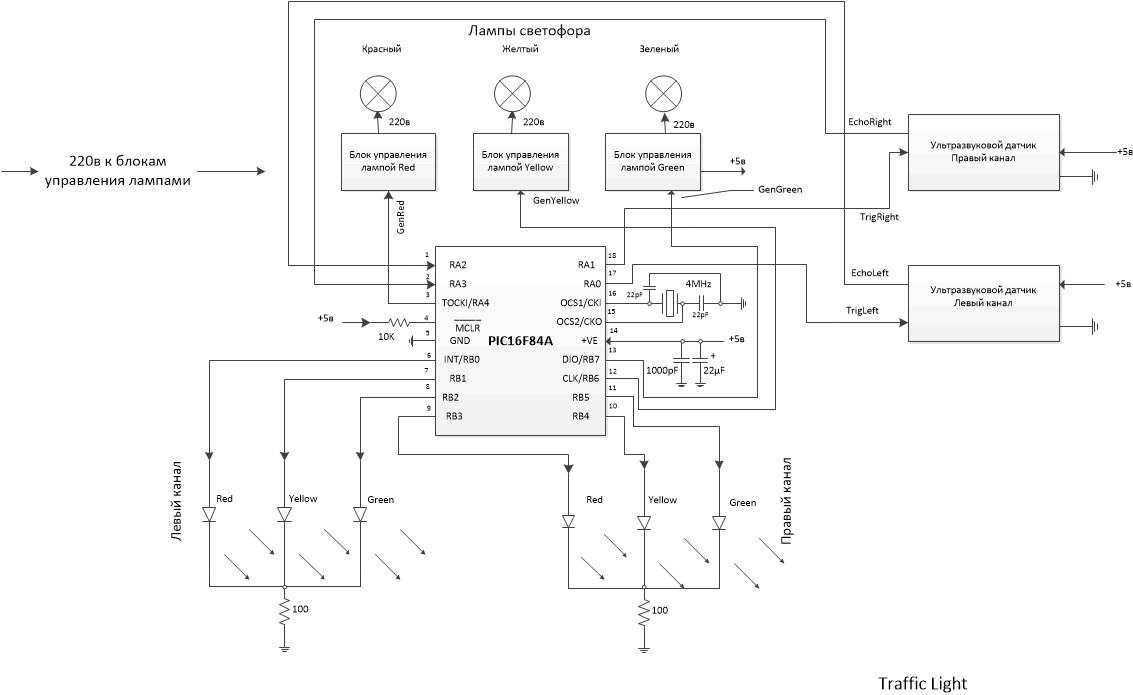
Принципиальная схема
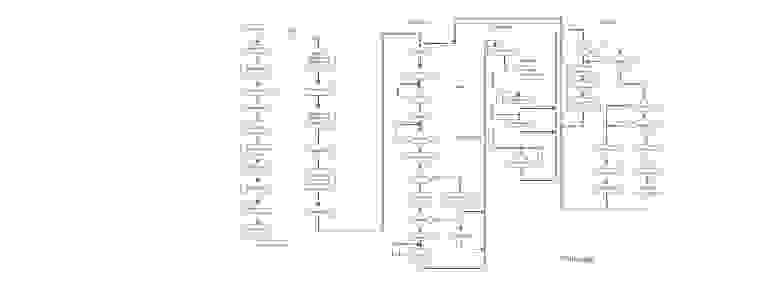
Алгоритм
Простой, практически линейный. По включении питания проводится тест аппаратуры. Якобы тест, больше для красоты. С интервалом в 1сек переключаются красный-желтый-зеленый, затем с тем же интервалом три раза включаются все лампы светофора. После этого — переход к бесконечному циклу опроса левого и правого каналов. При проходе каждого канала, в зависимости от полученного результата, устанавливается соответствующий бит (флаг) PORTB и включается один из светодиодов данного канала. По окончании полного цикла производится анализ состояния флагов Red-Yellow-Green обоих каналов и на основании этого включается соответствующая лампа светофора. Таблица истинности выглядит так:
Любой канал Красный. Светофор — Красный.
Оба канала Зеленый. Светофор — Зеленый.
Все остальные случаи. Светофор — Желтый.
В нескольких словах сердцевина алгоритма «по шагам»:
1. Формируем импульс Trig;
2. Ожидаем прихода ответного импульса Echo;
3. Запускаем таймаут 1ms;
4. По истечении таймаута проверяем есть ли еще «лог.1» на входе Echo;
5. Если нет, значит мы на опасном приближении к датчику соответствующего канала. Включаем красный флаг данного канала и переходим на другой канал;
6. Если Echo еще есть, повторяем п.п.3 и 4;
7. Если нет, значит мы на среднем удалении от датчика. Включаем желтый флаг и переходим на другой канал;
8. Если Echo еще есть, значит мы далеко. Дожидаемся его окончания, включаем зеленый флаг и переходим на другой канал.

В чем суть? Нам не нужно вычислять точное расстояние до объекта. То есть не надо длительность импульса Echo делить на 58, как указано в описании датчика. Мы, не дальномер строим. Нам нужно узнать всего лишь положение объекта по отношению к двум одинаковым диапазонам расстояний от объекта до датчика. Для этого используется таймаут 1ms (см.п.3), что в итоге дает: 1000µs: 58 = 17см. Итак – ближе 17см – красный, от 17 до 34см – желтый, дальше 34см – зеленый. Меняя константы в подпрограмме “Pause 1ms”, можно варьировать расстояния в зависимости от размеров авто, ширины ворот и навыков вождения.
Микропрограмма
Листинг микропрограммы приведен ниже. Ассемблер. Константы, кроме тех, что в таймаутах, – в двоичной системе, поскольку устройство, бит-ориентированное. И при отладке или анализе все равно пришлось бы переводить в двоичную систему. Для предотвращения зависаний в программе используется Watchdog Timer.
Листинг
list p=16F84A ; list directive to define processor
#include <p16F84A.inc> ; processor specific variable definitions
__CONFIG _CP_OFF & _WDT_ON & _PWRTE_ON & _XT_OSC
;********************** Contact Assignment *****************************
; Contact # Name Function
; 17 RA0 output TrigLeft
; 18 RA1 output TrigRight
; 01 RA2 input EchoLeft
; 02 RA3 input EchoRight
; 03 RA4 output GenRed
; 06 RB0 output RedLeft
; 07 RB1 output YellowLeft
; 08 RB2 output GreenLeft
; 09 RB3 output RedRight
; 10 RB4 output YellowRight
; 11 RB5 output GreenRight
; 12 RB6 output GenYellow
; 13 RB7 output GenGreen
;
;******************* Constants **************************
; Red 00000001 Left channel
; Yellow 00000010 Left channel
; Green 00000100 Left channel
;
; Red 00001000 Right channel
; Yellow 00010000 Right channel
; Green 00100000 Right channel
;***** VARIABLE DEFINITIONS *****************************
CBLOCK 0x0C
Reg_1 ; 0x0C use within Pause subroutine
Reg_2 ; 0x0D use within Pause subroutine
Reg_3 ; 0x0E use within Pause subroutine
ENDC
#define bank0 bcf STATUS,RP0 ; set bank0
#define bank1 bsf STATUS,RP0 ; set bank1
#define TrigLeft_1 bsf PORTA,0 ; set Trigleft
#define TrigLeft_0 bcf PORTA,0 ; clean Trigleft
#define TrigRight_1 bsf PORTA,1 ; set Trigright
#define TrigRight_0 bcf PORTA,1 ; clean Trigright
#define EchoLeft PORTA,2
#define EchoRight PORTA,3
#define RedLeft b'00000001
#define YellowLeft b'00000010
#define GreenLeft b'00000100
#define RedRight b'00001000
#define YellowRight b'00010000
#define GreenRight b'00100000
;**********************************************************************
ORG 0x000 ; processor reset vector
goto main ; go to beginning of program
;----------------------------------------------------------------------
;------------------ SUBROUTINE Pulse --------
;delay = 10 machine cycles = 10 µs
Pulse movlw .3
movwf Reg_1
wr0 decfsz Reg_1,F
goto wr0
return
;------------------ SUBROUTINE Pause 1ms --------
;delay = 1'000 machine cycles
Pause movlw .75
movwf Reg_1
movlw .3
movwf Reg_2
wr1 decfsz Reg_1,F
goto wr1
clrwdt
decfsz Reg_2,F
goto wr1
nop
return
;-------------------- SUBROUTINE Pause 1sec ---
;delay = 1'000'000 machine cycles
Pause1 movlw .254
movwf Reg_1
movlw .17
movwf Reg_2
movlw .6
movwf Reg_3
wr2 decfsz Reg_1,F
goto wr2
clrwdt
decfsz Reg_2,F
goto wr2
decfsz Reg_3,F
goto wr2
nop
nop
return
;-------------------- SUBROUTINE Pause 50ms --------
;delay = 50'000 machine cycles
Pause2 movlw .216
movwf Reg_1
movlw .65
movwf Reg_2
wr3 decfsz Reg_1,F
goto wr3
clrwdt
decfsz Reg_2,F
goto wr3
return
;--------------------- SUBROUTINE General Red ---------------
GenRed bsf PORTA,4
bcf PORTB,6
bcf PORTB,7
return
;--------------------- SUBROUTINE General Green -------------
GenGreen bsf PORTB,7
bcf PORTA,4
bcf PORTB,6
return
;--------------------- SUBROUTINE General Yellow ------------
GenYellow bsf PORTB,6
bcf PORTA,4
bcf PORTB,7
return
;--------------------- SUBROUTINE General All ------------
GenAll bsf PORTA,4
bsf PORTB,6
bsf PORTB,7
return
;---------------------------------------------------------
main
bank1 ; set Bank 1
movlw 0x00
movwf TRISB ; PORTB - out
movlw b'00001100
movwf TRISA ; RA2,RA3 - input; RA0,RA1,RA4 - output
bank0 ; return to Bank 0
clrf PORTA
clrf PORTB ; turn off all lights
;---------------------- TEST -----------------------------
call GenRed
call Pause1
call GenYellow
call Pause1
call GenGreen
call Pause1
bcf PORTA,4
bcf PORTB,6
bcf PORTB,7
call Pause1
call GenAll
call Pause1
bcf PORTA,4
bcf PORTB,6
bcf PORTB,7
call Pause1
call GenAll
call Pause1
bcf PORTA,4
bcf PORTB,6
bcf PORTB,7
call Pause1
call GenAll
call Pause1
bcf PORTA,4
bcf PORTB,6
bcf PORTB,7
call Pause1
goto SoundRight
;------------------LEFT----------------------
SoundLeft TrigLeft_1
call Pulse
TrigLeft_0
btfss EchoLeft
goto $-1
call Pause
btfss EchoLeft
goto SetRedLeft
call Pause
btfss EchoLeft
goto SetYellowLeft
goto SetGreenLeft
SetRedLeft movlw RedLeft
iorwf PORTB,1
bcf PORTB,1
bcf PORTB,2
goto SoundRight
SetYellowLeft movlw YellowLeft
iorwf PORTB,1
bcf PORTB,0
bcf PORTB,2
goto SoundRight
SetGreenLeft movlw GreenLeft
iorwf PORTB,1
bcf PORTB,0
bcf PORTB,1
clrwdt
btfsc EchoLeft ; wait Echo end
goto $-2
goto SoundRight
;----------------RIGHT---------------------
SoundRight call Pause2
TrigRight_1
call Pulse
TrigRight_0
btfss EchoRight
goto $-1
call Pause
btfss EchoRight
goto SetRedRight
call Pause
btfss EchoRight
goto SetYellowRight
goto SetGreenRight
SetRedRight movlw RedRight
iorwf PORTB,1
bcf PORTB,4
bcf PORTB,5
goto SetGenLight
SetYellowRight movlw YellowRight
iorwf PORTB,1
bcf PORTB,3
bcf PORTB,5
goto SetGenLight
SetGreenRight movlw GreenRight
iorwf PORTB,1
bcf PORTB,3
bcf PORTB,4
clrwdt
btfsc EchoRight ; wait Echo end
goto $-2
;------------------------ Set General Lights ----------------
SetGenLight btfss PORTB,0 ; check RedLeft
goto CheckRedRight
call GenRed
goto SoundLeft
CheckRedRight btfss PORTB,3
goto CheckGreenLeft
call GenRed
goto SoundLeft
CheckGreenLeft btfss PORTB,2
goto SetGenYellow
btfss PORTB,5
goto SetGenYellow
call GenGreen
goto SoundLeft
SetGenYellow call GenYellow
goto SoundLeft
END
Видео
Благодарности и обязательства
Автор выражает благодарность своей жене, которая во время реальных испытаний бесстрашно стояла в воротах гаража и следила за тем, чтобы автор не въехал ни левым, ни правым крылом авто в стену на въезде. Если найдутся бесстрашные последователи, желающие повторить проект, автор ответит всем.
