После очередного просмотра мультфильма WALL-E пришла идея собрать для сына такого робота. Конечно же такой робот продаётся, скажете Вы и называется «WALL-E U-Command Remote Control», но стоит он не мало. Не хотел покупать очередную игрушку, хотел совместно с сыном собрать что-то своё, со своими элементами и функциями. Что у нас получилось, смотрите ниже.




Начались поиски донора. На просторах всем известного аукциона был найден подходящий лот «WALL-E U-Command Remote Control» за символическую цену. Из описания продавца следовало следующее: утерян ИК-пульт, не горит один глаз, левая гусеница не движется. Лот я купил, через некоторое время пришла посылка, радости нашей не было предела. WALL-E по размерам крупный, увесистый, внешне все детали на месте и не сломаны, внутренности меня особо не волновали, т.к. хотел всё менять и переделывать. Вставили батарейки, включили — ура, даже что-то работает, издаёт звуки и горит один глаз. Разобрали WALL-E, чтобы посмотреть, что же там внутри и оценить объём работ.
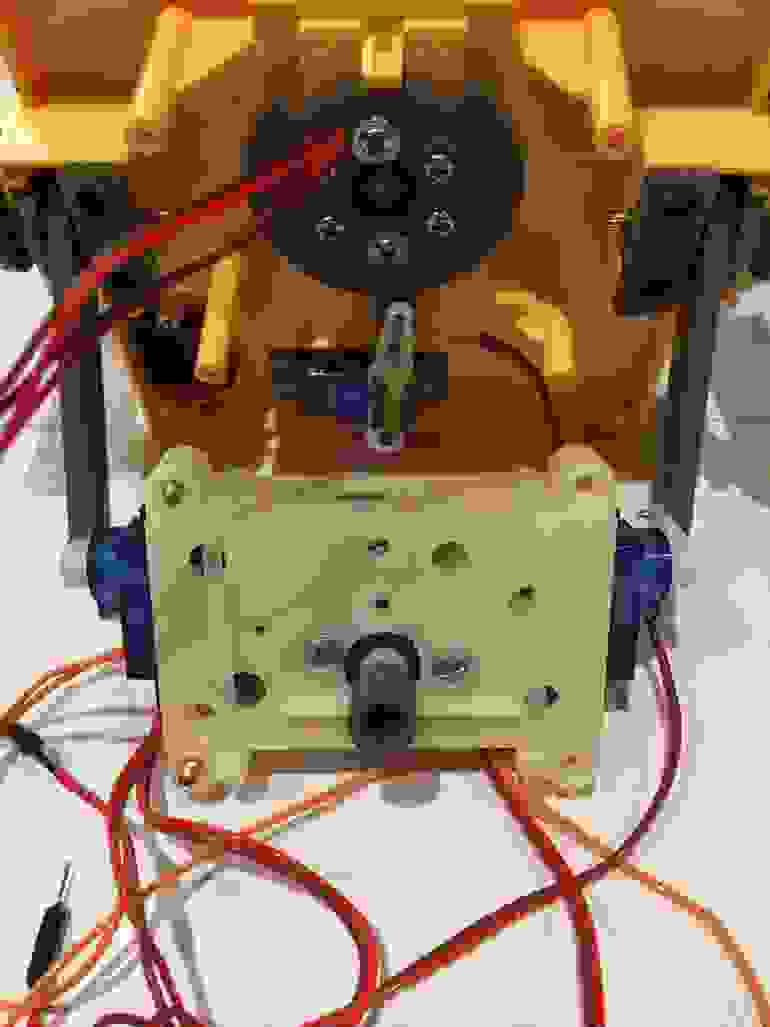
Выяснилось: перегорел диод в одном глазу — заменили в обоих на новые; левая гусеница не движется из-за лопнувшей звёздочки (проворачивалась), которая одевается на вал, приводящий в движение колесо — просверлили звёздочку вместе с валом, вставили штифт и промазали эпоксидным клеем.
Начался процесс модернизации и сборки
Используемые комплектующие:
Ссылка на скетч




Начались поиски донора. На просторах всем известного аукциона был найден подходящий лот «WALL-E U-Command Remote Control» за символическую цену. Из описания продавца следовало следующее: утерян ИК-пульт, не горит один глаз, левая гусеница не движется. Лот я купил, через некоторое время пришла посылка, радости нашей не было предела. WALL-E по размерам крупный, увесистый, внешне все детали на месте и не сломаны, внутренности меня особо не волновали, т.к. хотел всё менять и переделывать. Вставили батарейки, включили — ура, даже что-то работает, издаёт звуки и горит один глаз. Разобрали WALL-E, чтобы посмотреть, что же там внутри и оценить объём работ.
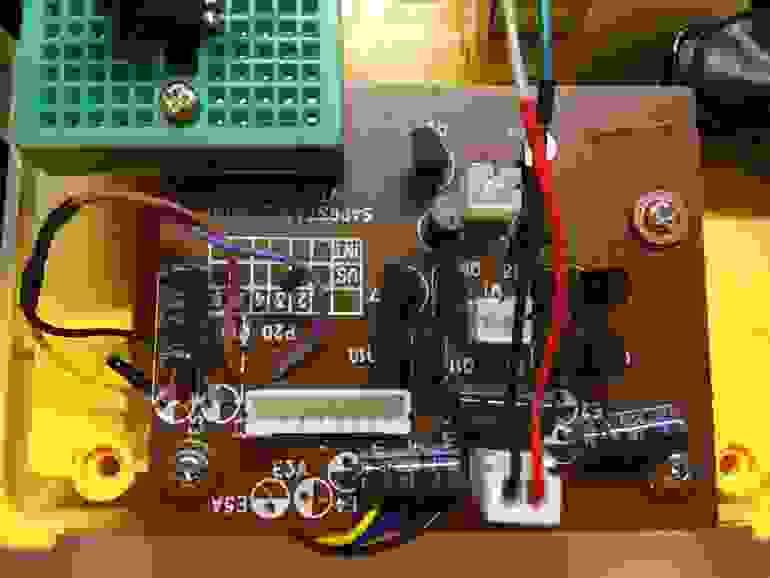
Оригинальные внутренности WALL-E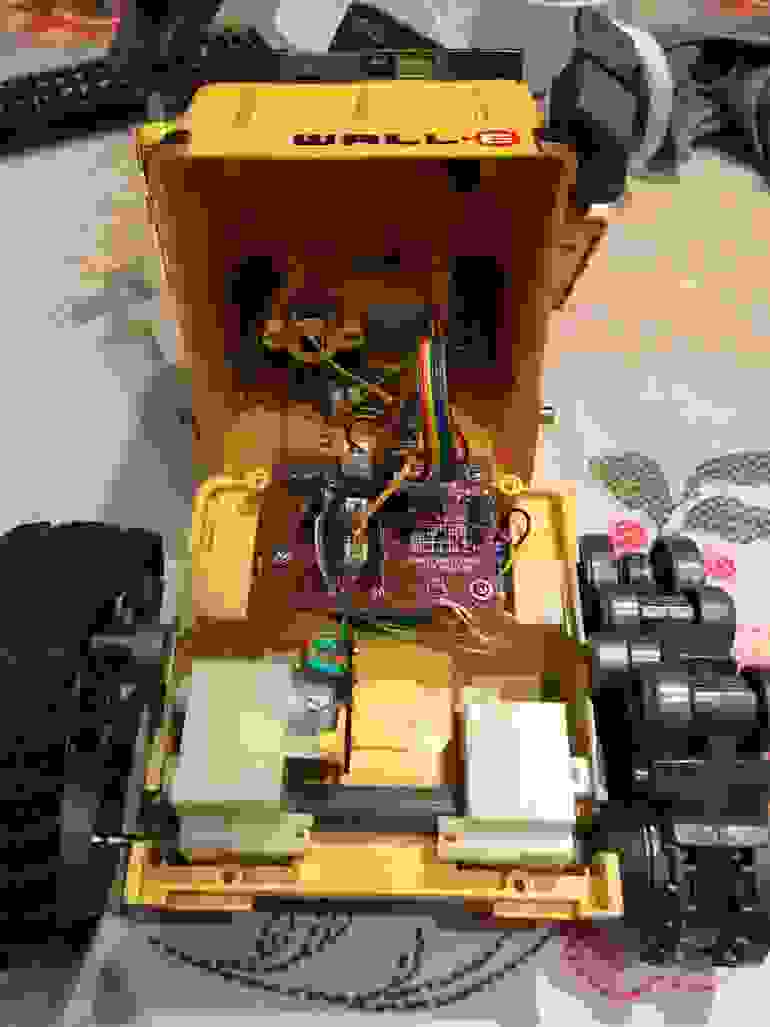
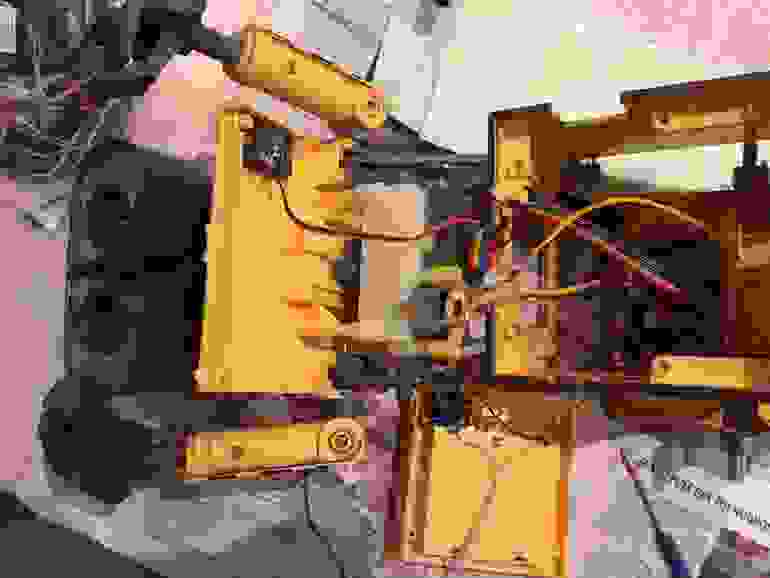





Выяснилось: перегорел диод в одном глазу — заменили в обоих на новые; левая гусеница не движется из-за лопнувшей звёздочки (проворачивалась), которая одевается на вал, приводящий в движение колесо — просверлили звёздочку вместе с валом, вставили штифт и промазали эпоксидным клеем.
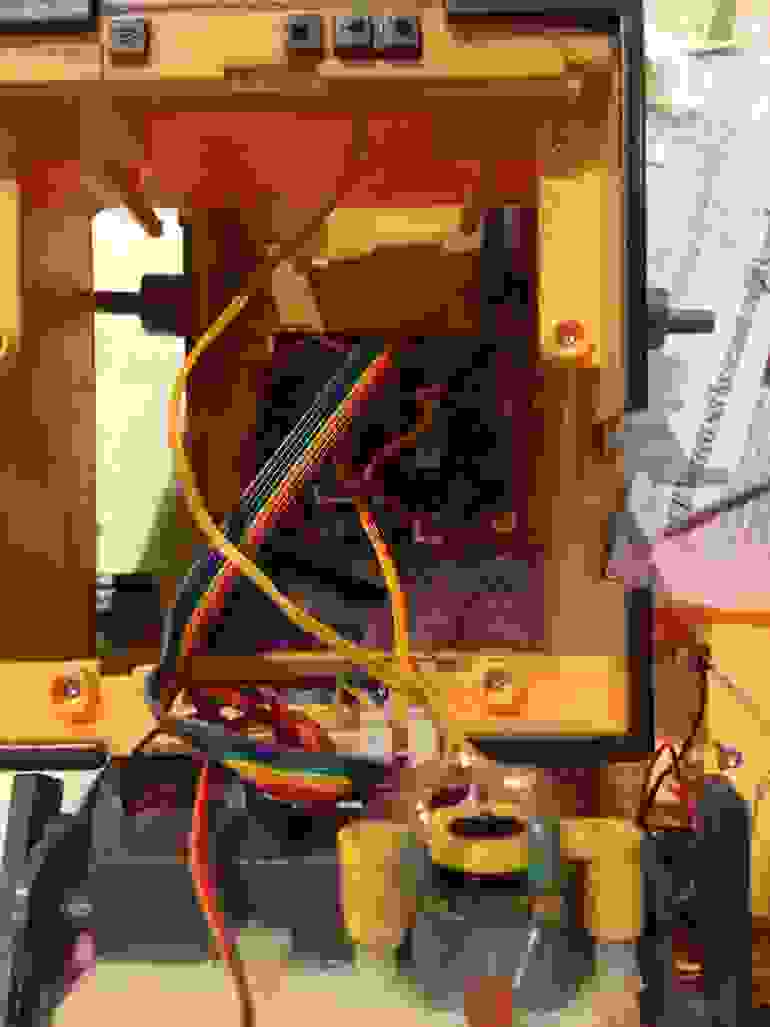
Начался процесс модернизации и сборки
Используемые комплектующие:
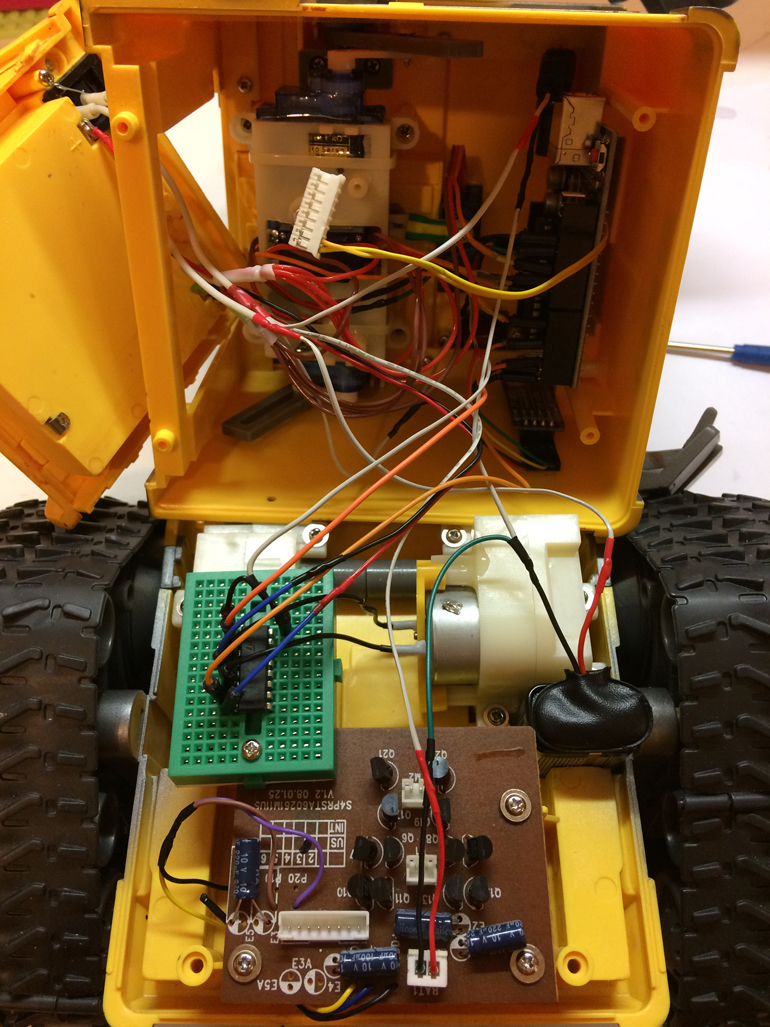
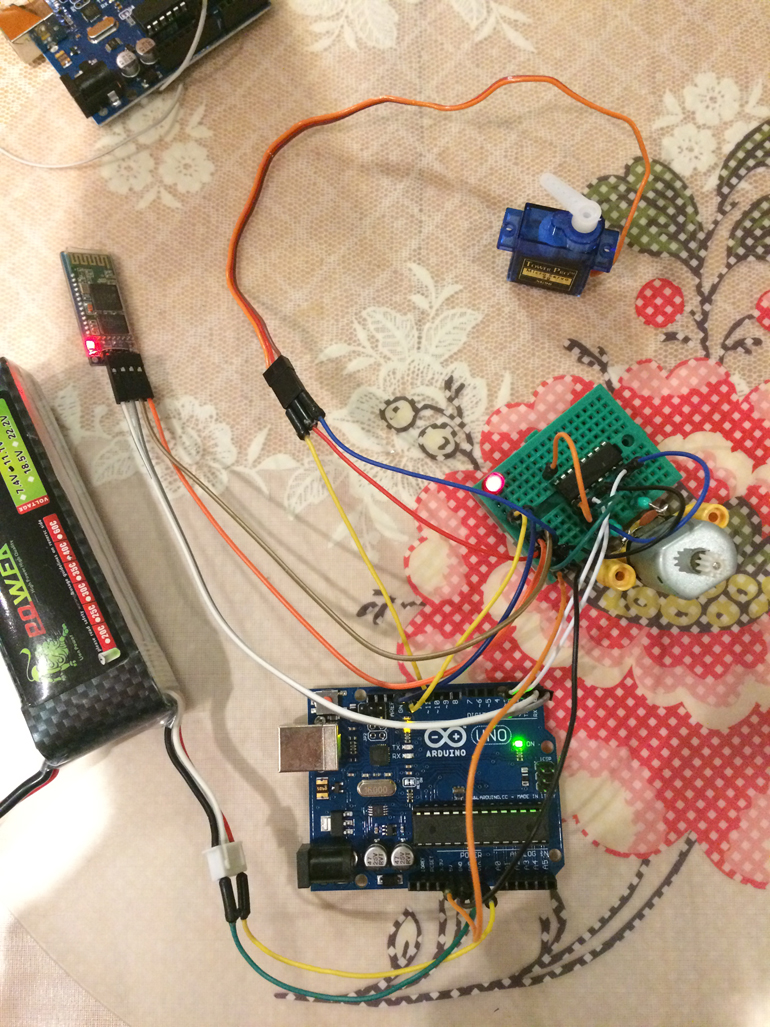
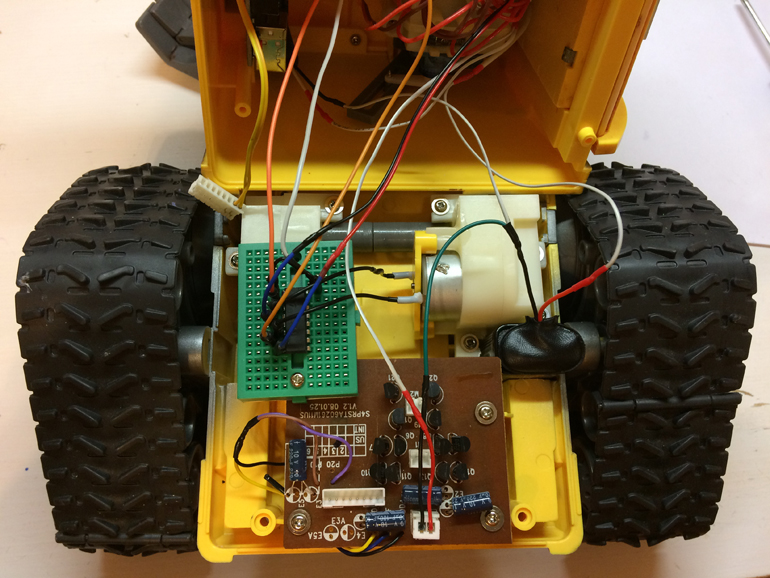
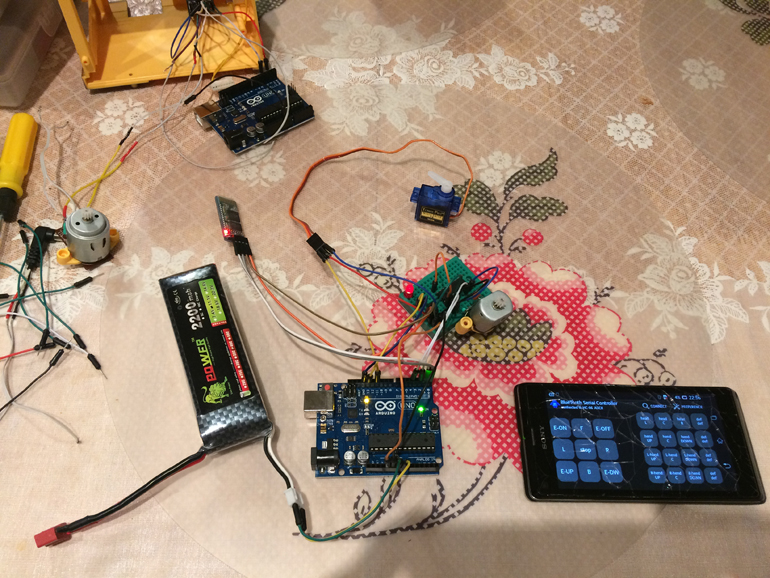
Arduino UNOПолностью описывать сборку и подключение не буду, ниже будет схема и фото, опишу несколько моментов. В оригинальном исполнении присутствует всего два мотора: один стоит в центральном модуле и приводит в движение руки, голову и глаза — его я убрал, модуль доработал под установку сервоприводов для управления руками, головой и глазами; второй мотор стоит в левом нижнем отсеке и приводит в движение гусеницы — управление им осуществил через драйвер двигателя L293D. При реверсе мотора осуществляется круговое движение назад для поворота, как и в оригинальном исполнении. Кнопку воспроизведения заложенных звуков подключил напрямую к соответствующим контактам на оригинальной плате. Управление WALL-E осуществляется по Bluetooth со смартфона на Android через приложение BlueTooth Serial Controller.
Bluetooth модуль HC-05 JY-MCU
Драйвер двигателя L293D
Сервопривод SG90 — 4 шт.
Тумблер — 2 шт.
Mini Voltmeter DC 4.5-30V
Беспаечная макетная плата
Провода
Схема подключения
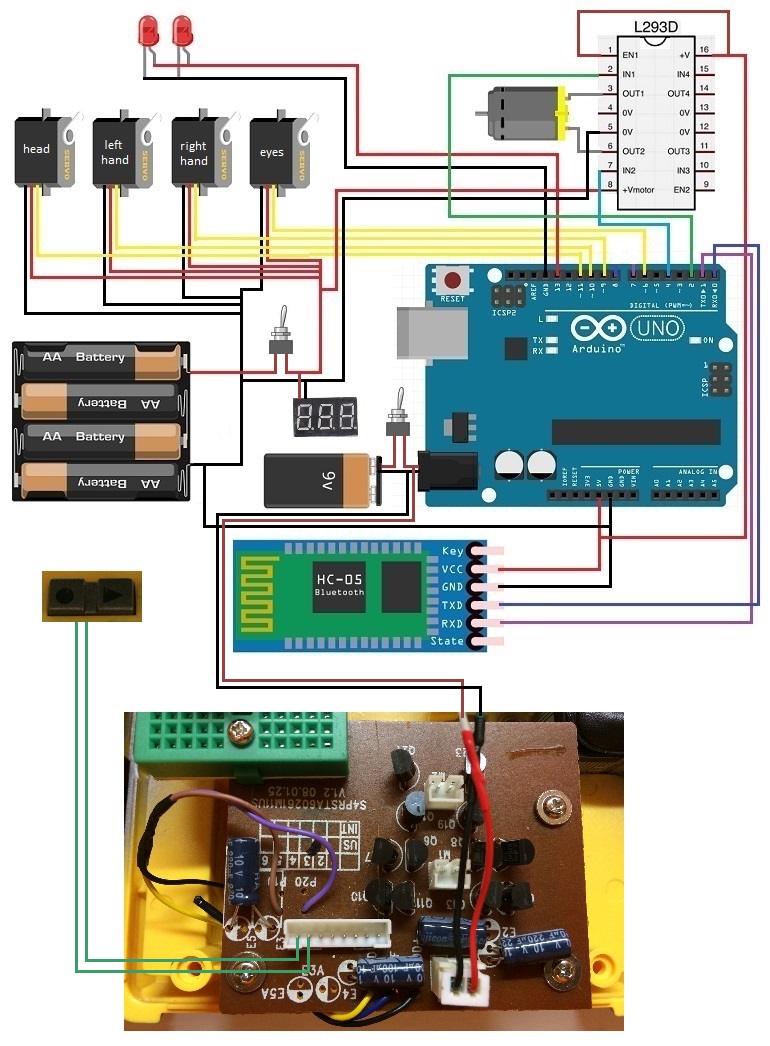
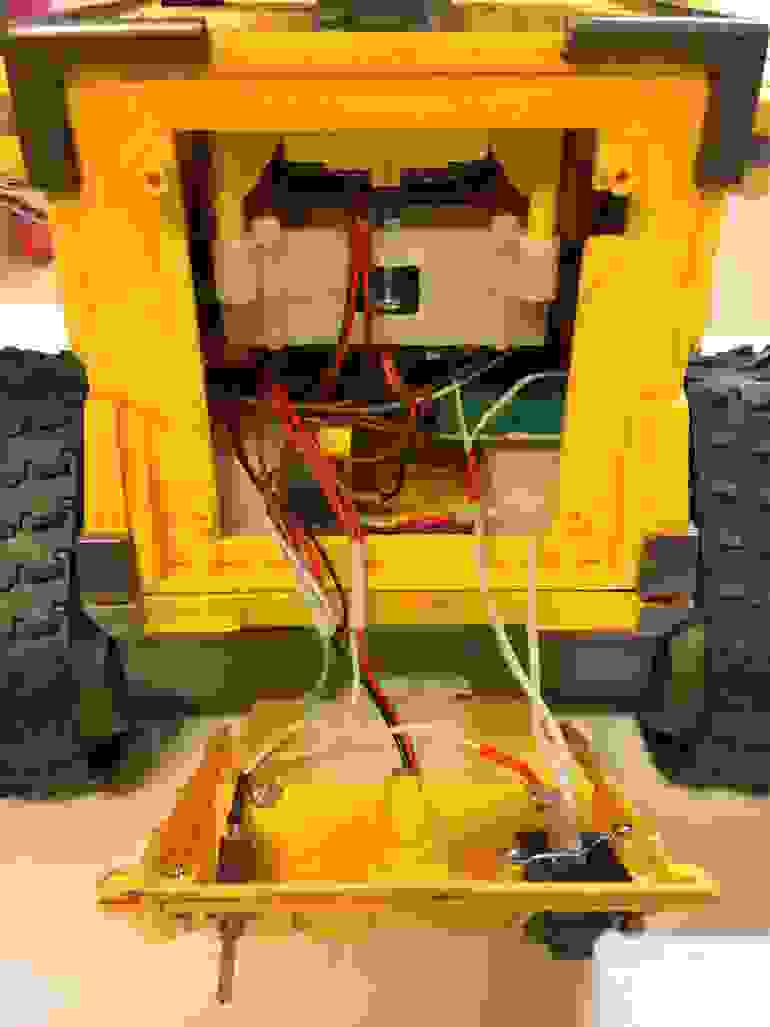
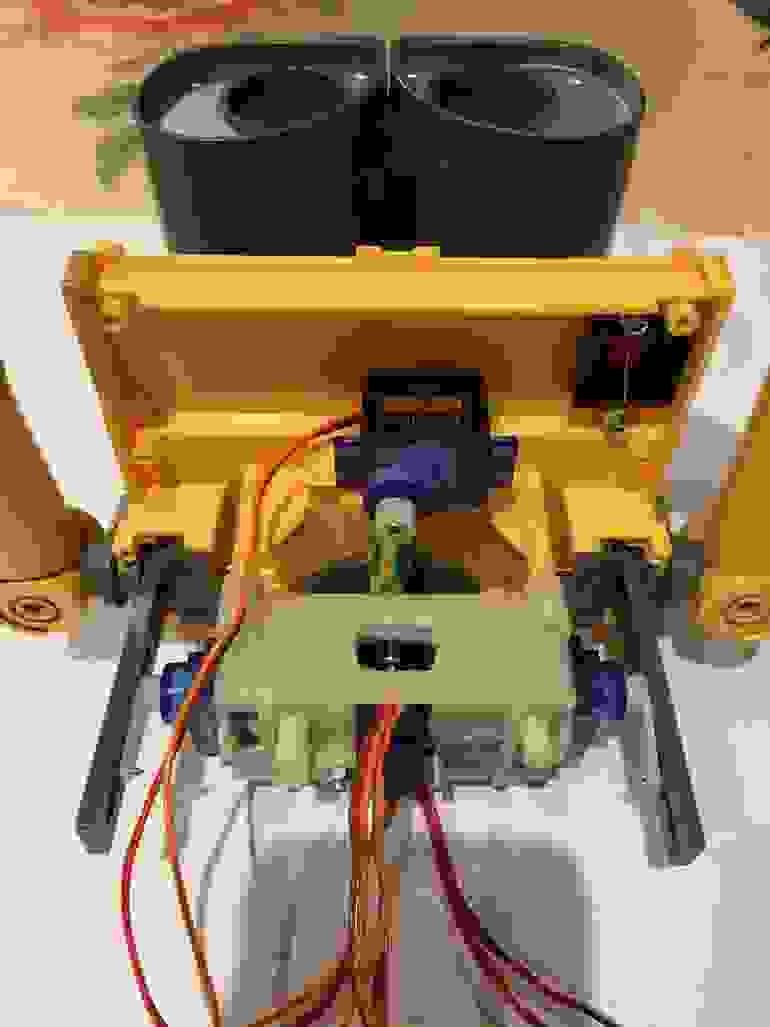
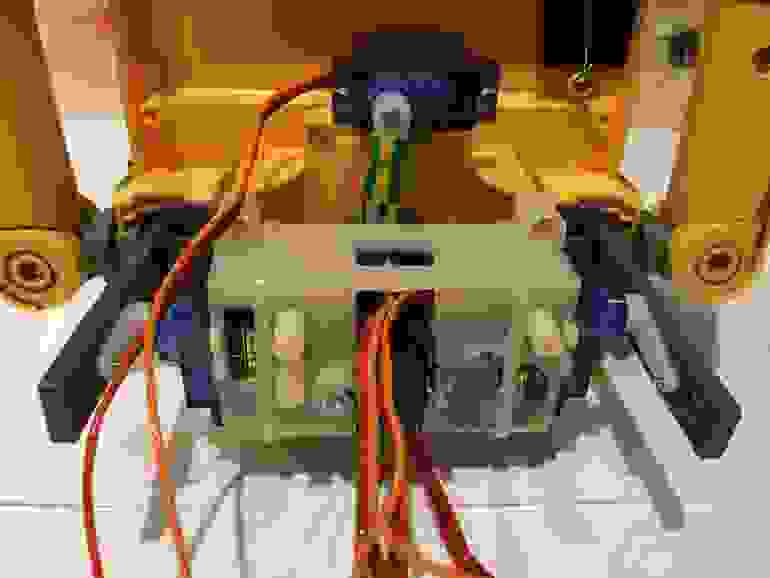
Фото сборки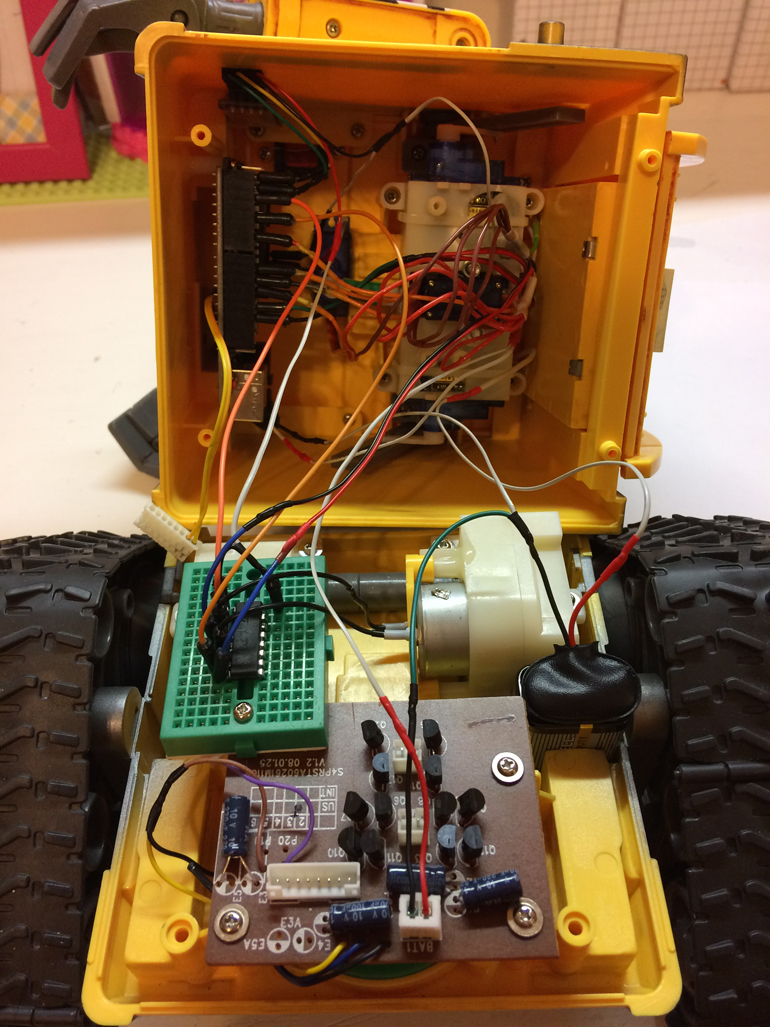
















Ссылка на скетч
