О LightSail уже рассказывалось на Geektimes, например geektimes.ru/post/250712
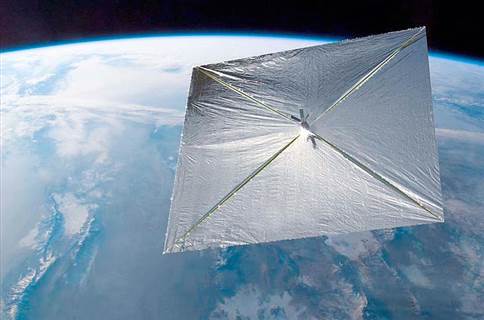
Спутник был успешно запущен неделю назад. Телеметрия успешно принималась два дня, все системы работали нормально, раскрытие паруса планировалось в июне, после 28 дней полета, но затем в пятницу спутник «пропал». Инженеры провели отличные выходные пытаясь разобраться с причинами произошедшего.
Результатом их работы стала статья Software Glitch Pauses LightSail Test Mission с описанием событий приведших сбою и дальнейших шагов по возвращению спутника к нормальной работе.
Телеметрия передается на частоте 437.435 MHz, Planetary Society призывало радиолюбителей помочь им принимать телеметрию спутника. Первым радиолюбителем принявший полный пакет телеметрии стал Ken Swaggart (W7KKE) из Lincoln City, штат Орегон, событие произошло через пять часов после запуска. За два дня было получено 140 пакетов данных — состояние спутника было хорошее, питание и температура в норме.
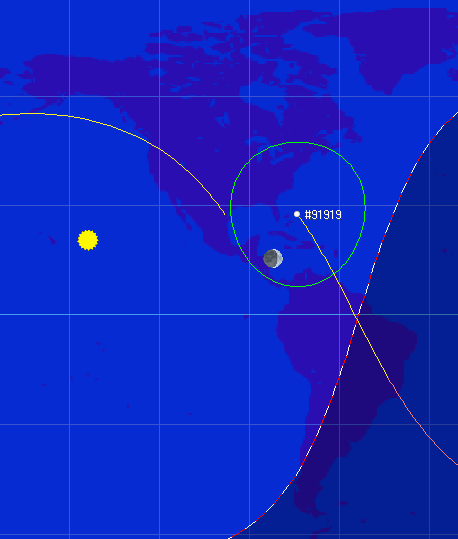
Но ошибка была в программном обеспечении спутника на базе Linux. Каждые 15 секунд спутник отправлял сигнал радиомаяка. Одновременно данные дописывались в файл beacon.csv. Неумолимо приближался момент, когда файл занял всё доступное пространство памяти в 32 мегабайта и полетное ПО упало. Оказывается производитель платы управления уже имел версию ПО с исправленной ошибкой, но спутник не был обновлен до актуальной версии. В пятницу команда управления получила уведомление о ошибке в ПО и готовилась к дистанционному обновлению ПО спутника при следующем прохождении его в зоне видимости станции, но спутник завис раньше. Последняя телеметрия была получена 22 мая в 21:31 по UTC. На изображении положение спутника в момент последнего сеанса связи:
На данный момент команда пытается перезагрузить спутник, вследствие чего будет стерт файл beacon.csv и будет возможно в нормальном режиме обновить или исправить ПО. Спутник не имеет Watchdog и перезагрузка осуществляется по команде с Земли. В прошедший вторник команда управления при пролете спутника в зоне видимости станций пыталась перезагрузить спутник. Более 18 раз посылалась команда перезагрузки, но ничего не произошло. Команда надеется на то, что спутник перезагрузится самостоятельно — космические частицы часто вызывают перезагрузку систем спутников типа Cubesat. По мнению специалистов перезагрузка спутника может произойти в течении 3-6 недель. Команда Planetary Society просит радиолюбителей слушать частоту Lightsail и прислать им сообщение на lightsail@planetary.org если сигнал будет обнаружен. Свежие TLE спутника публикуются здесь — sail.planetary.org/tles/live.txt
Команда будет продолжать рассматривать варианты исправления работы ПО, например такой как отправить beacon.csv в null, и, при некоторых прохождениях спутника в зоне видимости, посылать команды перезагрузки т.к. необходимо выдержать время между перезагрузкой системы и появлением телеметрии. Если работа со спутником будет восстановлена, то парус будет открыт как можно скорее.

P.S. Пример телеметрии LightSail
Спутник был успешно запущен неделю назад. Телеметрия успешно принималась два дня, все системы работали нормально, раскрытие паруса планировалось в июне, после 28 дней полета, но затем в пятницу спутник «пропал». Инженеры провели отличные выходные пытаясь разобраться с причинами произошедшего.
Результатом их работы стала статья Software Glitch Pauses LightSail Test Mission с описанием событий приведших сбою и дальнейших шагов по возвращению спутника к нормальной работе.
Телеметрия передается на частоте 437.435 MHz, Planetary Society призывало радиолюбителей помочь им принимать телеметрию спутника. Первым радиолюбителем принявший полный пакет телеметрии стал Ken Swaggart (W7KKE) из Lincoln City, штат Орегон, событие произошло через пять часов после запуска. За два дня было получено 140 пакетов данных — состояние спутника было хорошее, питание и температура в норме.
Но ошибка была в программном обеспечении спутника на базе Linux. Каждые 15 секунд спутник отправлял сигнал радиомаяка. Одновременно данные дописывались в файл beacon.csv. Неумолимо приближался момент, когда файл занял всё доступное пространство памяти в 32 мегабайта и полетное ПО упало. Оказывается производитель платы управления уже имел версию ПО с исправленной ошибкой, но спутник не был обновлен до актуальной версии. В пятницу команда управления получила уведомление о ошибке в ПО и готовилась к дистанционному обновлению ПО спутника при следующем прохождении его в зоне видимости станции, но спутник завис раньше. Последняя телеметрия была получена 22 мая в 21:31 по UTC. На изображении положение спутника в момент последнего сеанса связи:
На данный момент команда пытается перезагрузить спутник, вследствие чего будет стерт файл beacon.csv и будет возможно в нормальном режиме обновить или исправить ПО. Спутник не имеет Watchdog и перезагрузка осуществляется по команде с Земли. В прошедший вторник команда управления при пролете спутника в зоне видимости станций пыталась перезагрузить спутник. Более 18 раз посылалась команда перезагрузки, но ничего не произошло. Команда надеется на то, что спутник перезагрузится самостоятельно — космические частицы часто вызывают перезагрузку систем спутников типа Cubesat. По мнению специалистов перезагрузка спутника может произойти в течении 3-6 недель. Команда Planetary Society просит радиолюбителей слушать частоту Lightsail и прислать им сообщение на lightsail@planetary.org если сигнал будет обнаружен. Свежие TLE спутника публикуются здесь — sail.planetary.org/tles/live.txt
Команда будет продолжать рассматривать варианты исправления работы ПО, например такой как отправить beacon.csv в null, и, при некоторых прохождениях спутника в зоне видимости, посылать команды перезагрузки т.к. необходимо выдержать время между перезагрузкой системы и появлением телеметрии. Если работа со спутником будет восстановлена, то парус будет открыт как можно скорее.
P.S. Пример телеметрии LightSail
полный пакет телеметрии
Packet 440500
Type: Telemetry Beacon
Mission: LS
Software: LS-FSW-v2
Hardware: LightSail Flight Unit A
Posted at: Wed May 20 18:32:41 2015 UTC
Human-readable form:
00: RTC =33315 [s]
01: UserTime =1373 [jiffies]
02: SystemTime =7761 [jiffies]
03: Processes =5966
04: Processes_Running =2
05: Processes_Blocked =0
06: Uplink_RX_Counter =0
07: Atmel_Volt =4.351990 [V]
08: Atmel_Curr =0.051117 [A]
09: DaughtAPwr_Volt =0.007996 [V]
10: DaughtAPwr_Curr =0.000000 [A]
11: DaughtATmp =15.500000 [C]
12: DaughtBPwr_Volt =0.007996 [V]
13: DaughtBPwr_Curr =-0.000900 [A]
14: DaughtBTmp =16.750000 [C]
15: FiveV_PlPwr_Volt =4.915985 [V]
16: FiveV_PlPwr_Curr =0.280914 [A]
17: ThreeV_PlPwr_Volt =3.279999 [V]
18: ThreeV_PlPwr_Curr =0.042725 [A]
19: SP1_Temp =22.500000 [C]
20: SP2_Temp =23.250000 [C]
21: SP3_Temp =24.000000 [C]
22: SP4_Temp =24.250000 [C]
23: SP5_Temp =0.000000 [C]
24: Power0_In =0.000250 [A]
25: Power1_Out =0.000250 [A]
26: Power2_In =0.000250 [A]
27: Power3_Out =0.000250 [A]
28: Power4_In =0.000250 [A]
29: Power5_Out =0.000250 [A]
30: Power6_In =0.000250 [A]
31: Power7_Out =0.000250 [A]
32: Power8 =0.664750 [A]
33: Batt0_Voltage =4.309040 [V]
34: Batt0_Current =79.375003 [mA]
35: Batt1_Voltage =4.313920 [V]
36: Batt1_Current =62.500002 [mA]
37: Batt2_Voltage =4.309040 [V]
38: Batt2_Current =97.656253 [mA]
39: Batt3_Voltage =4.299280 [V]
40: Batt3_Current =109.531254 [mA]
41: Batt4_Voltage =3.747840 [V]
42: Batt4_Current =10.156250 [mA]
43: Batt5_Voltage =4.313920 [V]
44: Batt5_Current =104.218753 [mA]
45: Batt6_Voltage =4.318800 [V]
46: Batt6_Current =106.562503 [mA]
47: Batt7_Voltage =4.313920 [V]
48: Batt7_Current =100.781253 [mA]
49: Gyro_Sens_1 =-7.062500 [deg/s]
50: Gyro_Sens_2 =-0.100000 [deg/s]
51: Gyro_Sens_3 =0.137500 [deg/s]
52: Sun_Sens1_X =150.300003 [deg]
53: Sun_Sens1_Y =131.399994 [deg]
54: Sun_Sens2_X =126.000000 [deg]
55: Sun_Sens2_Y =63.900002 [deg]
56: Sun_Sens3_X =58.500000 [deg]
57: Sun_Sens3_Y =80.099998 [deg]
58: Sun_Sens4_X =80.099998 [deg]
59: Sun_Sens4_Y =150.300003 [deg]
60: Sun_Sens5_X =180.000000 [deg]
61: Sun_Sens5_Y =180.000000 [deg]
62: Mag_Sens1_X =99 [mG]
63: Mag_Sens1_Y =382 [mG]
64: Mag_Sens1_Z =47 [mG]
65: Mag_Sens2_X =190 [mG]
66: Mag_Sens2_Y =149 [mG]
67: Mag_Sens2_Z =189 [mG]
68: Mag_Sens3_X =128 [mG]
69: Mag_Sens3_Y =259 [mG]
70: Mag_Sens3_Z =256 [mG]
71: Mag_Sens4_X =119 [mG]
72: Mag_Sens4_Y =18 [mG]
73: Mag_Sens4_Z =156 [mG]
74: Torque_Curr_X =0 [A]
75: Torque_Curr_Y =0 [A]
76: Torque_Curr_Z =0 [A]
77: Panel_Switch_Status =f
78: Motor_Current_Position =0 [Counts]
79: Camera_0_onOff =0
80: Camera_1_onOff =0
81: Sail_stowedDeployed =0
82: Motor_onOff =0
83: Camera_0_Remaining_Pics=0
84: Camera_1_Remaining_Pics=0
85: Bang_onOff =1
86: Sail_Damping_Executed =0
87: Pib_Met =4.000000 [s]
Type: Telemetry Beacon
Mission: LS
Software: LS-FSW-v2
Hardware: LightSail Flight Unit A
Posted at: Wed May 20 18:32:41 2015 UTC
Human-readable form:
00: RTC =33315 [s]
01: UserTime =1373 [jiffies]
02: SystemTime =7761 [jiffies]
03: Processes =5966
04: Processes_Running =2
05: Processes_Blocked =0
06: Uplink_RX_Counter =0
07: Atmel_Volt =4.351990 [V]
08: Atmel_Curr =0.051117 [A]
09: DaughtAPwr_Volt =0.007996 [V]
10: DaughtAPwr_Curr =0.000000 [A]
11: DaughtATmp =15.500000 [C]
12: DaughtBPwr_Volt =0.007996 [V]
13: DaughtBPwr_Curr =-0.000900 [A]
14: DaughtBTmp =16.750000 [C]
15: FiveV_PlPwr_Volt =4.915985 [V]
16: FiveV_PlPwr_Curr =0.280914 [A]
17: ThreeV_PlPwr_Volt =3.279999 [V]
18: ThreeV_PlPwr_Curr =0.042725 [A]
19: SP1_Temp =22.500000 [C]
20: SP2_Temp =23.250000 [C]
21: SP3_Temp =24.000000 [C]
22: SP4_Temp =24.250000 [C]
23: SP5_Temp =0.000000 [C]
24: Power0_In =0.000250 [A]
25: Power1_Out =0.000250 [A]
26: Power2_In =0.000250 [A]
27: Power3_Out =0.000250 [A]
28: Power4_In =0.000250 [A]
29: Power5_Out =0.000250 [A]
30: Power6_In =0.000250 [A]
31: Power7_Out =0.000250 [A]
32: Power8 =0.664750 [A]
33: Batt0_Voltage =4.309040 [V]
34: Batt0_Current =79.375003 [mA]
35: Batt1_Voltage =4.313920 [V]
36: Batt1_Current =62.500002 [mA]
37: Batt2_Voltage =4.309040 [V]
38: Batt2_Current =97.656253 [mA]
39: Batt3_Voltage =4.299280 [V]
40: Batt3_Current =109.531254 [mA]
41: Batt4_Voltage =3.747840 [V]
42: Batt4_Current =10.156250 [mA]
43: Batt5_Voltage =4.313920 [V]
44: Batt5_Current =104.218753 [mA]
45: Batt6_Voltage =4.318800 [V]
46: Batt6_Current =106.562503 [mA]
47: Batt7_Voltage =4.313920 [V]
48: Batt7_Current =100.781253 [mA]
49: Gyro_Sens_1 =-7.062500 [deg/s]
50: Gyro_Sens_2 =-0.100000 [deg/s]
51: Gyro_Sens_3 =0.137500 [deg/s]
52: Sun_Sens1_X =150.300003 [deg]
53: Sun_Sens1_Y =131.399994 [deg]
54: Sun_Sens2_X =126.000000 [deg]
55: Sun_Sens2_Y =63.900002 [deg]
56: Sun_Sens3_X =58.500000 [deg]
57: Sun_Sens3_Y =80.099998 [deg]
58: Sun_Sens4_X =80.099998 [deg]
59: Sun_Sens4_Y =150.300003 [deg]
60: Sun_Sens5_X =180.000000 [deg]
61: Sun_Sens5_Y =180.000000 [deg]
62: Mag_Sens1_X =99 [mG]
63: Mag_Sens1_Y =382 [mG]
64: Mag_Sens1_Z =47 [mG]
65: Mag_Sens2_X =190 [mG]
66: Mag_Sens2_Y =149 [mG]
67: Mag_Sens2_Z =189 [mG]
68: Mag_Sens3_X =128 [mG]
69: Mag_Sens3_Y =259 [mG]
70: Mag_Sens3_Z =256 [mG]
71: Mag_Sens4_X =119 [mG]
72: Mag_Sens4_Y =18 [mG]
73: Mag_Sens4_Z =156 [mG]
74: Torque_Curr_X =0 [A]
75: Torque_Curr_Y =0 [A]
76: Torque_Curr_Z =0 [A]
77: Panel_Switch_Status =f
78: Motor_Current_Position =0 [Counts]
79: Camera_0_onOff =0
80: Camera_1_onOff =0
81: Sail_stowedDeployed =0
82: Motor_onOff =0
83: Camera_0_Remaining_Pics=0
84: Camera_1_Remaining_Pics=0
85: Bang_onOff =1
86: Sail_Damping_Executed =0
87: Pib_Met =4.000000 [s]
