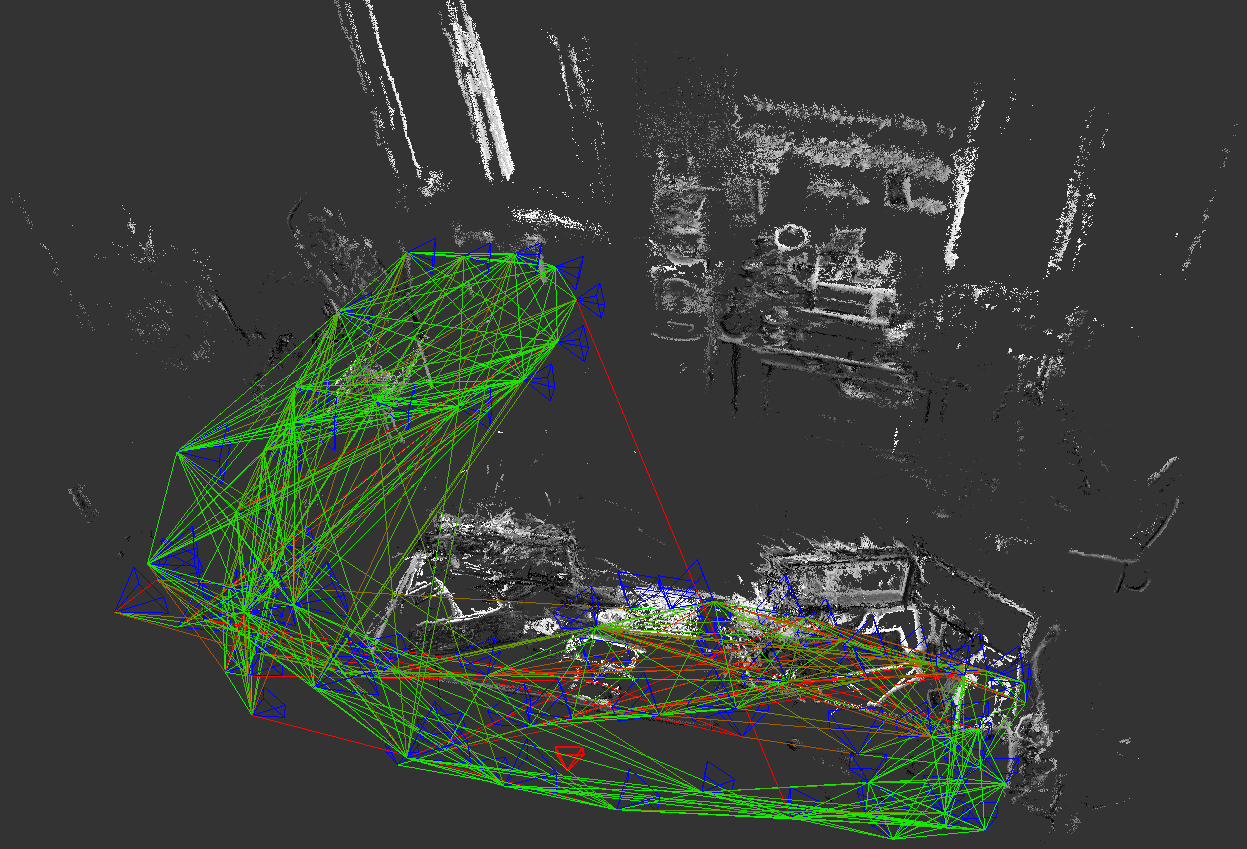
После небольшого перерыва мы продолжаем серию статей-уроков по SLAM. В предыдущих выпусках мы подготовили программное окружение, а также поработали с монокулярным SLAM. Под катом – урок по использованию SLAM на основе стереокамеры и камеры глубины. Мы расскажем о настройке пакетов и оборудования и дадим советы по использованию двух ROS-пакетов: ставшего традиционным RTAB-Map и свежего вкусного ElasticFusion.
Продолжаем серию статей-уроков по визуальному SLAM уроком о работе с его монокулярными вариантами. Мы уже рассказывали об установке и настройке окружения, а также проводили общий обзор в статье о навигации квадрокоптера. Сегодня попробуем разобраться, как работают разные алгоритмы SLAM, использующие единственную камеру, рассмотрим их различия для пользователя и дадим рекомендации по применению.
После опубликования статьи об опыте использования монокулярного SLAM мы получили несколько комментариев с вопросами о подробной настройке. Мы решили ответить песней серией статей-уроков о SLAM. Сегодня предлагаем ознакомиться с первой из них, в которой поставим все необходимые пакеты и подготовим окружение для дальнейшей работы.
Сейчас для многих компьютерное зрение не является тайной за семью замками. Однако новые алгоритмы и подходы не перестают впечатлять. Одним из таких направлений является монокулярное зрение, в особенности SLAM. О том, как мы решали задачу навигации квадрокоптера, оснащенного единственной камерой, и пойдет речь в этой статье.
Мы продолжаем наш туториал об использовании кастомных жестов в связке Kinect+Unity. В первой части мы рассмотрели процесс обучения жестов, в результате чего у нас получилась обученная модель в виде .gdb файла. Сегодня мы будем использовать эту модель в Unity.
Здравствуй, сегодня мы научимся использовать кастомные жесты в наших Unity-приложениях, делать мы это будем с помощью Kinect'a v2. Жесты можно использовать для широкого круга задач: перемещение по сцене, управление объектами, работа с пользовательским интерфейсом и др. В первой части мы рассмотрим процесс обучения жестов, во второй будем использовать полученную в результате обучения модель в Unity. Также узнаем о возможных проблемах и решениях.
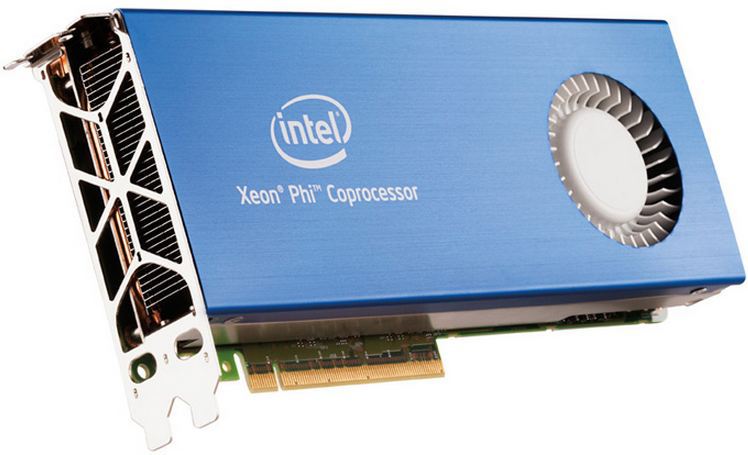
Сопроцессоры Intel Xeon Phi(TM) представляют собой PCI Express устройство и имеют x86 архитектуру, обеспечивая высокую пиковую производительности — до 1,2 терафлопс (триллион операций с плавающей запятой в секунду) двойной точности на сопроцессор. Xeon Phi(TM) может обеспечивать одновременную работу до 244 потоков, и это нужно учитывать при программировании для достижения максимальной эффективности.
Недавно мы вместе с компанией Intel проводили небольшое исследование эффективности реализации алгоритма Штрассена для сопроцессора Intel Xeon Phi(TM). Кому интересны тонкости работы с этим устройством и просто любящих параллельное программирование, прошу под кат.
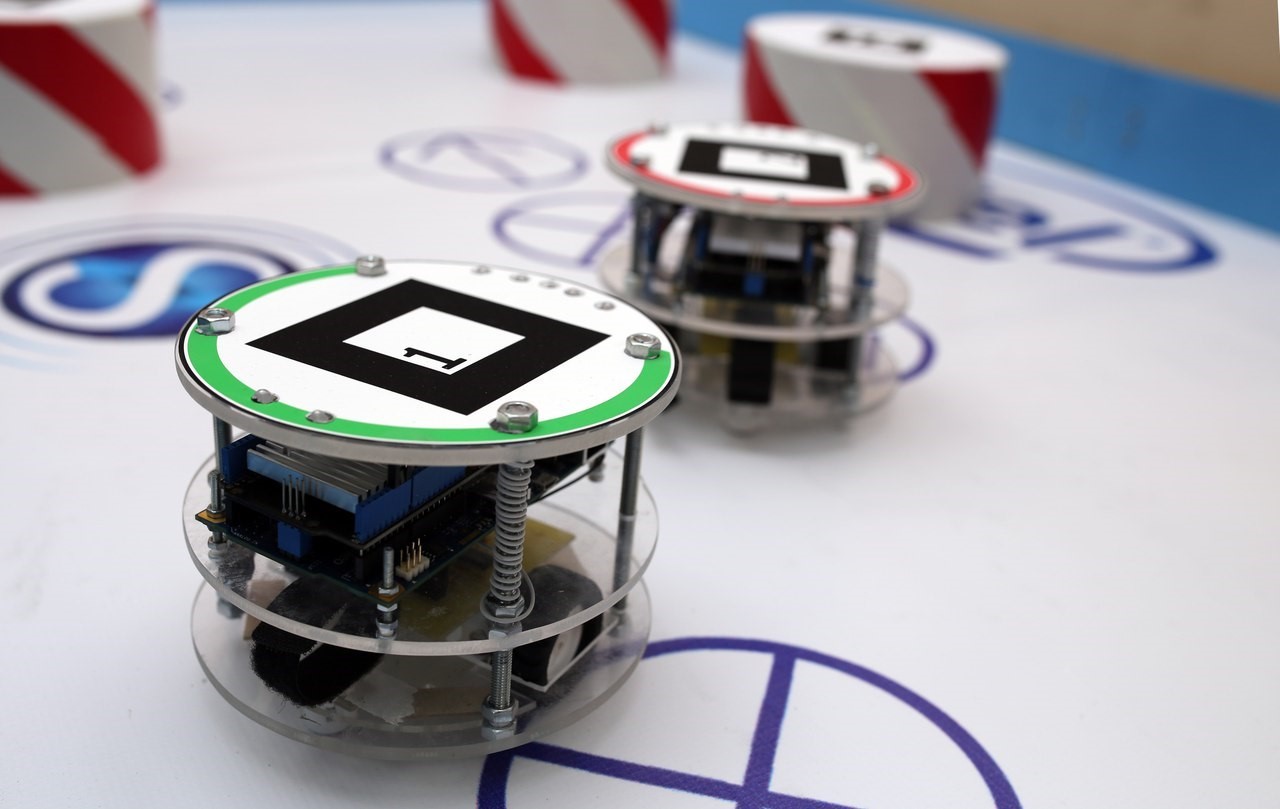
Code Game Challenge – захватывающий формат соревнований, который вызывает у студентов большой интерес. В рамках IV Всероссийской молодёжной школы по робототехнике, встраиваемым системам и компьютерному зрению (http://roboschool.org), которая прошла в ноябре в Волгограде, мы хотели преподнести участникам что-то новое. Так родилась идея RoboCGC – совместить роботов и CGC. Подробности под катом.