Существовавшие раньше роботизированные руки могли либо осторожно захватить яйцо, либо поднять тяжёлый баскетбольный мяч. Одно из двух. Никогда – и то, и другое. В этом всегда было их важное отличие от человеческих рук, способных быть ловкими и сильными одновременно.
Инженеры из Национального университета Сингапура (NUS) решили исправить ситуацию и построили роботизированную систему, которая может захватывать разные предметы, от мягких и хрупких до громоздких и тяжелых. Предполагается, что новинка будет востребована в сельском хозяйстве, при сборке пищевых продуктов и упаковке товаров.
По данным NUS, эти отрасли стараются максимально автоматизировать свои процессы, но некоторые из них всё ещё требуют ловкости человеческих рук. Каждый раз, собираясь взять какой-либо предмет, мы оцениваем его форму, текстуру, вес и размер. Это позволяет решить, как лучше захватить его, чтобы, к примеру, не повредить. Поэтому робо-руки не всегда могут полноценно заменить человека.
Решением могут стать роботизированные захваты с 3-4 мягкими и гибкими пальцами, расположенными на реконфигурируемом основании. Пальцы имеют пневматический привод и оснащены блокирующим механизмом, который позволяет регулировать степень нажатия. Также они покрыты клейким материалом, напоминающим пальцы геккона.
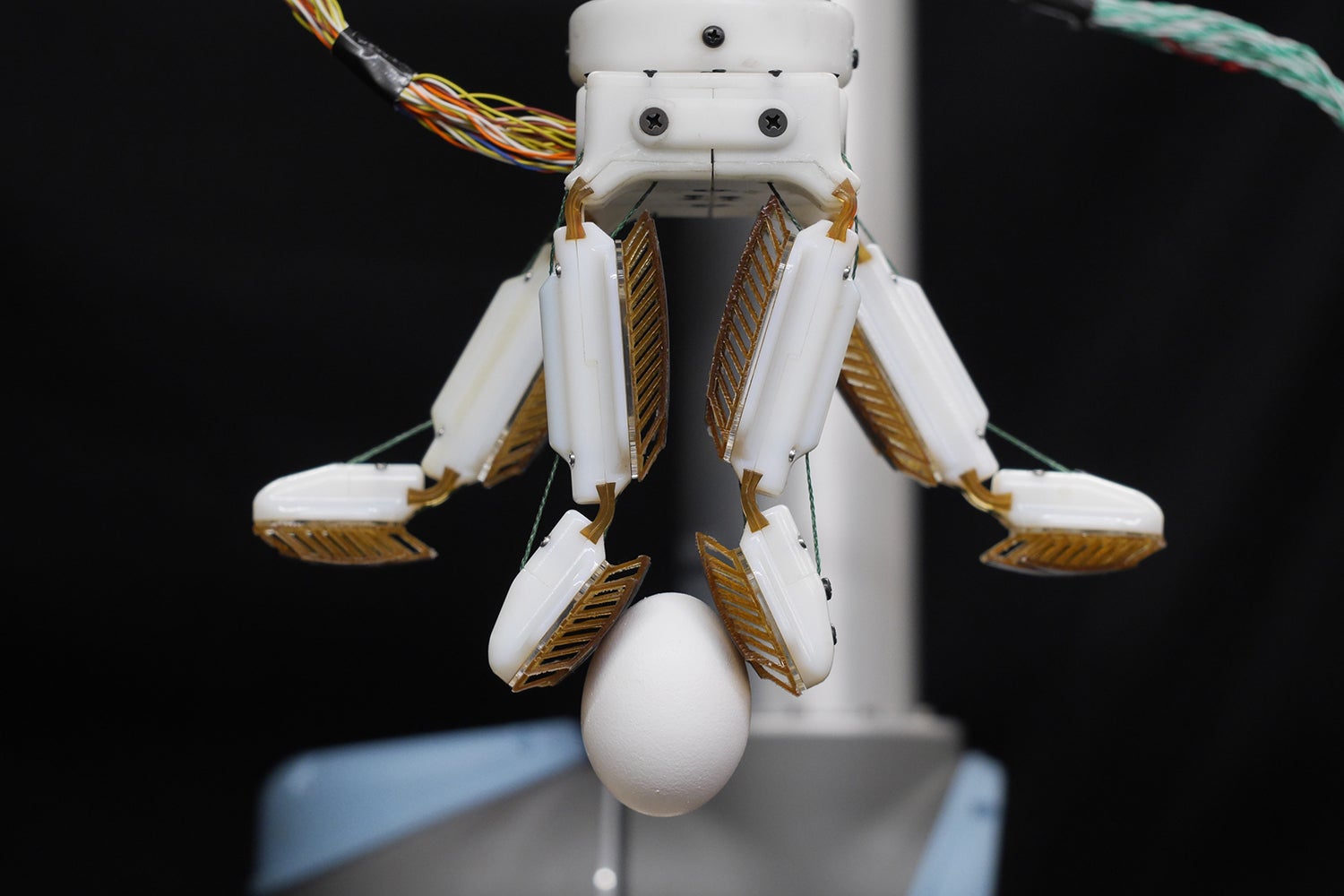
Клей геккона создает прочную фиксацию с помощью микроскопических лоскутов. При полном контакте с поверхностью эти створки создают силу Ван-дер-Ваальса: слабую межмолекулярную силу, которая возникает из-за тонких различий в положениях электронов на внешней стороне молекул. В результате клеи могут сильно сжиматься, но для этого требуется небольшое усилие. Еще один бонус: они не липнут на ощупь и не оставляют следов.
Клей, созданный под вдохновением от гекконов, должен определенным образом соединяться с поверхностью, чтобы активировать силу Ван-дер-Ваальса. Это легко контролировать, когда покрытие плавно наносится на плоскую поверхность, но гораздо сложнее, если поверхность должна контактировать с объектом под разными углами, как в случае с пальцами роботизированной руки.
Для решения этой проблемы пальцы получили форму складной ребристой конструкции. Независимо от местоположения или угла контакта, рёбра постоянно изгибаются, чтобы обеспечить равномерные усилия на липких подушках и предотвратить преждевременное соскальзывание любой из них.
Также важны и сухожилия робо-руки, потому что они обеспечивают правильный захват. В то время как обычные роботизированные руки берут объекты кончиками пальцев, складывая их в форме буквы «C». Новая система сжимает пальцы так, чтобы предмет полностью прилегал к подушечке. Таким образом клей контактирует с большей поверхностью объекта.
Роботизированная система использует компьютерное зрение и технологии глубокого обучения, поэтому она может определять тип объектов и их ориентацию в пространстве. Затем система автоматически решает, как лучше всего захватывать и размещать объекты, чтобы минимизировать вмешательство человека.
Система конфигурируется «под запрос» и может быть оснащена тремя различными вариантами захватов для различных целей:
1. GourmetGrip. Подходит для гранулированных объектов, например, мелких пищевых продуктов, хрупких, ломких предметов. Данный вариант также называют «режим мягких рук», он поддерживает различные режимы захвата и может работать в ограниченном пространстве.
GourmetGrip, установленный на промышленный робот-манипулятор, способен собирать и размещать продукты питания с той же скоростью, что и человек, но может делать это круглосуточно. По сравнению с другими промышленными захватами он является более точным, а его скорость выше на 23%. GourmetGrip захватывает 50 видов продуктов, включая пудинг, нарезанные торты и фрукты.
2. Universal Soft Gripper (UnisoGrip). Подходит для захвата товаров со сборочных линий, когда они находятся на заключительной стадии упаковки. Это наиболее гибкий вариант, который может подстраиваться под различные нужды. Данная система по размеру больше, чем GourmetGrip, и позволяет работать с предметами шириной до 30 см и весом до 3 кг.
UnisoGrip также имеет вращающиеся мягкие пальцы, которые подходят для ломких продуктов, а также вакуумную присоску, которая позволяет системе работать в труднодоступных местах, например, в углу большой корзины. На сегодняшний день система может захватывать более 30 видов потребительских товаров, включая пакеты с молотым кофе, многоразовые пакеты для моющих средств и напитки в бутылках.
Заказчики также могут создать систему захвата на основе GourmetGrip и UnisoGrip, полностью адаптированную под свои бизнес-процессы. Например, система была адаптирована для сингапурского производителя People Bee Hoon Factory, который выпускает рисовую лапшу. Робо-манипулятор оптимизирован для упаковки пакетов с рисовой лапшой в картонные коробки.
В настоящее время инженеры NUS работают над расширением спектра объектов, которые способна распознавать система.
