Всем привет! В этой статье мы расскажем про личный опыт работы с физическими движками для мультиплеерного шутера и главным образом сфокусируемся на взаимодействии физики и ECS: на какие грабли мы наступили в процессе работы, чему научились, почему остановились на конкретных решениях.
Для начала разберёмся, для чего же нужен физический движок. Универсального ответа здесь нет: в каждой игре он служит для своей цели. Некоторые игры используют физические движки для корректной симуляции поведения объектов в мире, чтобы достичь эффекта погружения игрока. В других физика является основой геймплея ― к таковым относятся, например, Angry Birds и Red Faction. Ещё существуют «песочницы», в которых физические законы отличаются от привычных и таким образом делают геймплей более интересным и необычным (Portal, A Slower Speed of Light).
С точки зрения программирования физический движок позволяет упростить процесс симуляции поведения объектов в игре. По сути он является библиотекой, в которой хранятся описания физических свойств предметов. При наличии физического движка нам не нужно самим разрабатывать систему взаимодействия тел и универсальные законы, по которым будет жить игровой мир. Это экономит кучу времени и сил на разработку.
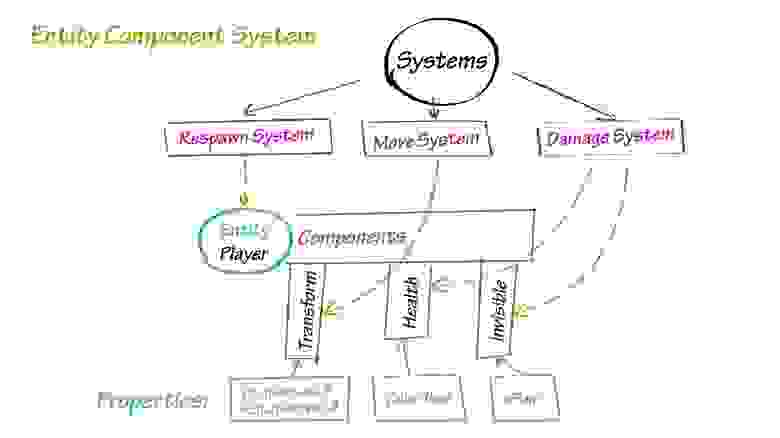
На схеме выше описаны сущность Player, её компоненты и их данные, и системы, которые работают с игроком и его компонентами. Ключевым объектом на схеме является игрок: он может перемещаться в пространстве — компоненты Transform и Movement, система MoveSystem; имеет некоторое кол-во здоровья и может погибнуть — компонент Health, Damage, система DamageSystem; после смерти появляется на точке возрождения (respawn) — компонент Transform для положения, система RespawnSystem; может быть неуязвимым — компонент Invincible.
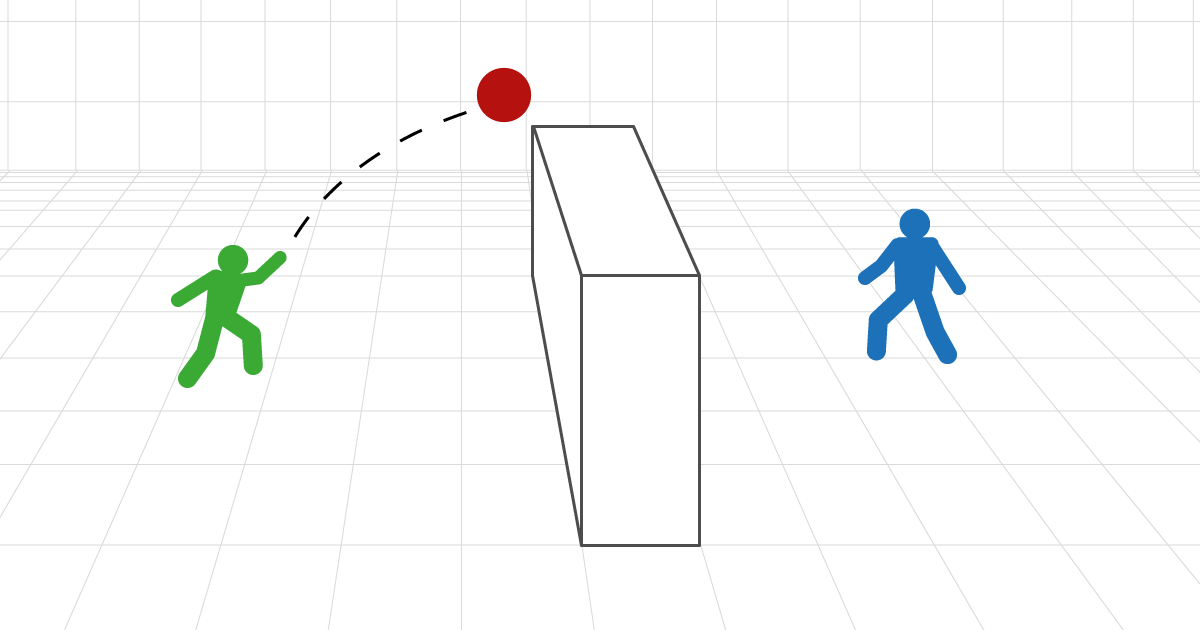
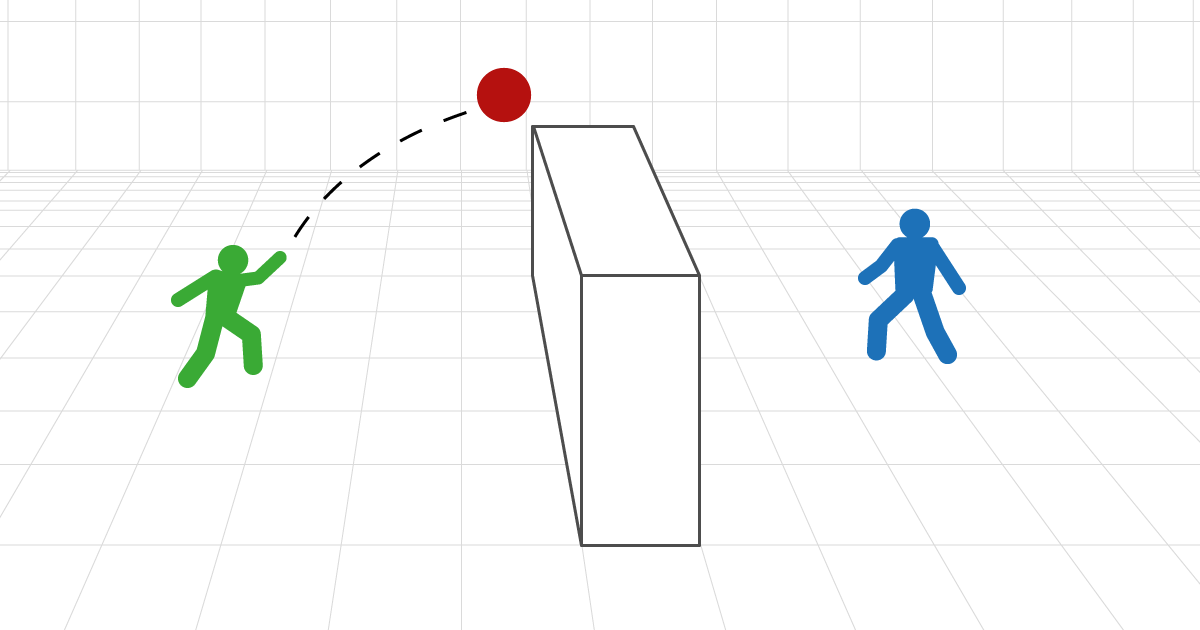
В нашей игре нет сложных физических взаимодействий, но существует ряд вещей, для которых физический движок всё-таки нужен. Изначально мы планировали использовать его для перемещения персонажа в мире в соответствии с заданными законами. Обычно это осуществляется путём сообщения телу некоего импульса или постоянной скорости, после чего посредством метода Simulate/Update библиотеки все зарегистрированные в ней тела симулируются ровно на один шаг вперёд.
В шутерах 3D-физику часто используют не только для симуляции перемещений персонажа, но и для корректной обработки баллистики пуль и ракет, прыжков, взаимодействия персонажей друг с другом и окружением. Если шутер претендует на реалистичность и стремится передать настоящие ощущения процесса стрельбы, физический движок ему просто необходим. Когда игрок стреляет из дробовика по цели, он ожидает получить опыт и результат, максимально похожий на тот, что ему уже знаком по многолетней игре в шутеры, ― нечто кардинально новое его с большой вероятностью неприятно удивит.
Но в случае нашей игры существует ряд ограничений. Поскольку наш шутер мобильный, он не предполагает сложных взаимодействий персонажей друг с другом и с окружающим миром, не требует красивой баллистики, разрушаемости, прыжков по неровной поверхности. Но в то же время и по той же причине есть очень жесткие требования по трафику. 3D-физика в этом случае была бы излишней: она использовала бы лишь малую часть своих вычислительных ресурсов и генерировала ненужные данные, которые в условиях мобильной сети и постоянной синхронизации клиента с сервером по UDP занимали бы слишком много места. Тут стоит напомнить, что в нашей сетевой модели ещё присутствуют такие вещи, как Prediction и Reconciliation, которые также предполагают проведение расчётов на клиенте. В результате получаем, что наша физика должна работать максимально быстро, чтобы успешно запускаться и работать на мобильных устройствах, не мешая при этом рендеру и другим подсистемам клиента.
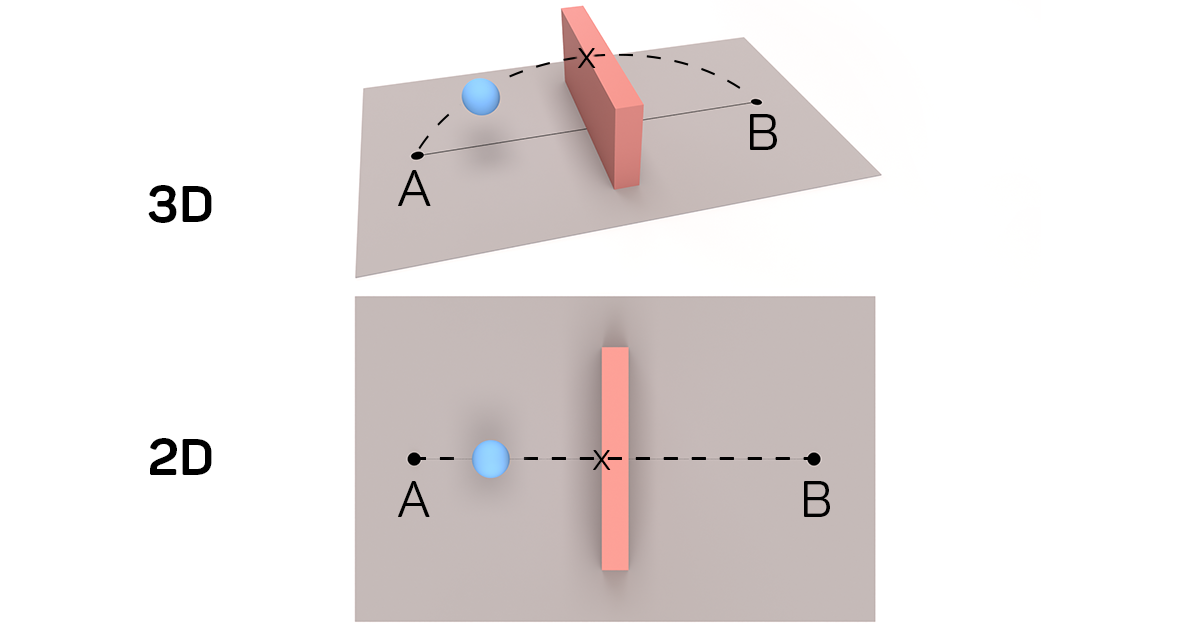
Итак, 3D-физика нам не подходила. Но здесь стоит вспомнить о том, что даже если игра выглядит как трёхмерная, не факт, что физика в ней реализована тоже трёхмерная: всё определяет характер взаимодействия объектов друг с другом. Зачастую эффекты, которые невозможно покрыть 2D-физикой, либо кастомизируются ― то есть, пишется логика, внешне напоминающая трёхмерные взаимодействия, ― либо просто заменяются на визуальные эффекты, не влияющие на геймплей. В Heroes of the Storm, Defense of the Ancients, League of Legends двумерная физика способна обеспечивать все геймплейные возможности игры, не влияя негативно на качество картинки или ощущение правдоподобности создаваемого геймдизайнерами и художниками мира. Так, например, в этих играх есть прыгающие персонажи, но физического смысла в высоте их прыжка нет, поэтому всё сводится к двумерной симуляции и установке какого-нибудь флага вида _isInTheAir, когда персонаж находится в воздухе, ― он учитывается при расчёте логики.
Так было решено использовать 2D-физику. Игру мы пишем на Unity, но сервер используем Unity-less .net, который язык Unity не понимает. Поскольку львиная доля кода симуляции пошарена между клиентом и сервером, мы стали подыскивать что-то кроссплатформенное ― а именно, физическую библиотеку, написанную на чистом C# без использования нативного кода, чтобы исключить опасность краша мобильных платформ. Более того, принимая во внимание специфику работы шутеров, в частности ― постоянные перемотки на сервере с целью определения, куда стрелял игрок, нам было важно, чтобы библиотека могла работать с историей ― то есть, можно было дёшево посмотреть положение тел N кадров назад во времени. И, конечно, проект не должен быть заброшенным: важно, чтобы автор поддерживал его и мог быстро исправить баги, если таковые найдутся в процессе эксплуатации.
Как оказалось, на тот момент очень мало библиотек могли удовлетворить нашим требованиям. Фактически, нам подходила только одна ― VolatilePhysics.
Библиотека примечательна тем, что работает как с Unity, так и с Unity-less решениями, а также позволяет делать рейкасты в прошлое состояние объектов из коробки, т.е. подходит для логики шутеров. Кроме того, удобство библиотеки заключается в том, что механизм контроля запуска симуляции Simulate() позволяет произвести её в любой момент, когда это будет необходимо клиенту. И ещё одна фишка ― возможность записывать дополнительные данные в физическое тело. Это может быть полезно при адресации объекта из симуляции в результатах рейкастов ― правда, при этом сильно снижается производительность.
Сделав пару тестов и убедившись, что клиент и сервер хорошо взаимодействуют с VolatilePhysics без падений системы, мы остановили свой выбор на ней.
Первым шагом при работе с VolatilePhysics является создание физического мира VoltWorld. Он представляет из себя прокси-класс, с которым и происходит основная работа: настройка, симуляция данных об объектах, рейкасты и т. д. Мы обернули его в специальный фасад, чтобы можно было в будущем сменить реализацию библиотеки на что-нибудь другое. Код фасада выглядел так:
При создании мира указывается величина истории ― количество состояний мира, которое библиотека будет хранить. В нашем случае их число равнялось 32: 30 кадров в секунду нам понадобится исходя из требования к обновлению логики и ещё 2 дополнительных на случай, если в процессе отладки мы выйдем за пределы истории. В коде также учтены прокинутые наружу методы, порождающие физические тела, и различного рода рейкасты.
Как мы помним из предыдущих статей, мир ECS по сути вращается вокруг регулярного вызова методов Execute для всех входящих в него систем. В нужных местах каждой системы мы используем вызовы к нашему фасаду. Изначально мы не писали никакого батчинга к вызову физического движка, хотя такие мысли были. Внутри фасада происходит вызов Update() физического мира, и библиотека симулирует все взаимодействия объектов, произошедшие за кадр.
Таким образом, работа с физикой сводится к двум составляющим: к равномерному передвижению тел в пространстве за один кадр и множеству рейкастов, необходимых для стрельбы, правильной работы эффектов и множества других вещей. Особенно актуальны рейкасты в историю состояний физических тел.
По результатам наших тестов мы быстро поняли, что библиотека очень плохо работает с разными скоростями, и на определённой скорости тела легко начинают проходить сквозь стены. Настроек, связанных с continuous collision detection, для решения этой проблемы в нашем движке предусмотрено не было. Но альтернатив нашему решению на рынке на тот момент не существовало, поэтому пришлось придумывать свой вариант передвижения объектов по миру и синхронизации данных физики с ECS. Так, например, наш код для системы передвижения выглядит следующим образом:
Идея состоит в том, что перед каждым ходом персонажа мы делаем CircleCast по направлению его движения с целью определения, есть ли перед ним препятствие. CircleCast нужен потому, что проекции персонажей в игре представляют круг, и мы не хотим, чтобы они застревали в углах между разными геометриями. Затем мы считаем приращение скорости и назначаем объекту физического мира это значение в качестве его скорости за один кадр. Следующим шагом будет вызов метода симуляции физического движка Update(), который двигает все необходимые нам объекты, попутно записывая старое состояние в историю. После того, как симуляция внутри движка завершилась, мы считываем эти просимулированные данные, копируем их в компонент Transform нашего ECS и далее продолжаем работать уже с ними, в частности ― рассылаем их по сети.
Такой подход в обновлении физики небольшими контролируемыми порциями данных о скорости перемещения персонажа оказался очень эффективным при борьбе с расхождениями физики на клиенте и сервере. И поскольку наша физика не детерминированная ― то есть, при одних и тех же входных данных результат симуляции может различаться, ― было много дискуссий на тему того, стоит ли вообще её использовать, и делает ли кто-либо в индустрии что-то подобное, не имея на руках детерминированного физического движка. К счастью, мы нашли отличный доклад от разработчиков NetherRealm Studios на Game Developers Conference о сетевой составляющей их игр и поняли, что такой подход действительно имеет место быть. Собрав полностью систему и прогнав её на нескольких тестах, мы получили порядка 50 лже-предсказаний за 9000 тиков, т. е. за время пятиминутного боя. Такое количество промахов предсказаний легко нивелируется механизмом Reconciliation и визуальной интерполяцией позиции игрока. Ошибки, возникающие при частом обновлении физики вручную при помощи собственных данных, являются незначительными, поэтому визуальная интерполяция может проходить довольно быстро ― она нужна лишь для того, чтобы не возникало визуального скачка модели персонажа.
Для проверки совпадения состояний клиента и сервера мы использовали самописный класс следующего вида:
При необходимости его можно автоматизировать, но мы этого делать не стали, хотя и думали об этом в будущем.
Код сравнения трансформов:
Не возникало никаких проблем с симуляцией движения, пока его можно было проецировать на 2D-плоскость, ― физика в таких случаях работала очень хорошо, но в один момент пришли геймдизайнеры и сказали: «Хотим гранаты!» И мы подумали, чтобы сильно ничего не менять, почему бы не сэмулировать 3D-полет физического тела, имея на руках только 2D-данные.
И ввели понятие высоты для некоторых объектов.
Как выглядит закон изменения высоты с течением времени для брошенного тела, проходят на уроках физики в восьмом классе, так что решение по баллистике оказалось тривиальным. Но уже не столь тривиальным получилось решение с коллизиями. Давайте представим себе этот случай: граната при полёте должна или столкнуться со стеной, или перелететь её в зависимости от своей текущей высоты и высоты стены. Решать задачу будем только в двумерном мире, где граната представлена кругом, а стена ― прямоугольником.
Вид геометрии объектов для решения задачи.
В первую очередь мы отключили взаимодействие динамического тела гранаты с другими статическими и динамическими телами. Это нужно для того, чтобы сосредоточиться на поставленной цели. В нашей задаче граната должна уметь проходить сквозь другие объекты и «перелетать» стену, когда их проекции на двумерной плоскости пересекаются друг с другом. При обычном взаимодействии два объекта не могут проходить друг сквозь друга, и всё же в случае гранаты с кастомной логикой перемещения и высотой мы разрешили ей это делать при определённых условиях.
Мы ввели для гранаты отдельный компонент GrenadeMovement, в котором завели понятие высоты:
Теперь граната имеет координату высоты, однако остальному миру эта информация ничего не даёт. Поэтому мы решили схитрить и добавили следующее условие: граната может перелетать через стены, но только определённой высоты. Таким образом, всё определение коллизий свелось к проверке коллизий проекции и сравнению высоты стены со значением поля GrenadeMovement.Height. Если высота полёта гранаты оказывается меньше, она сталкивается со стеной, иначе может спокойно продолжать движение по своей траектории, в том числе и в 2D-пространстве.
В первой итерации граната просто падала при нахождении пересечений, но затем мы добавили упругие столкновения, и она стала вести себя практически неотличимо от того результата, который мы получили бы в 3D.
Полный код расчёта траектории движения гранаты и упругих коллизий приведён ниже:
Игра живёт, развивается, и со временем нам стало необходимо каким-то образом отлаживать то, что происходит с её физическим движком на сервере. В одной из статей я уже описывал подробно отладку ECS на сервере. Что же до физики, у нас есть непосредственный визуальный редактор, который берёт данные из JSON, структура которых генерируется вместе с остальным лейаутом ECS. Выглядит этот редактор так:

Видно, что фактически у нас существует два «мира». Первый представляет из себя наш ECS, в котором мы описываем состояния объектов игры, в том числе их физические параметры. Второй мир ― физический ― создан библиотекой и, естественно, не написан в стиле ECS, но задачу синхронизации данных между этими мирами ECS берёт на себя. Важно, чтобы библиотека предоставляла API, с помощью которого можно управлять её данными, и их можно было и читать, и писать. Также очень важным выводом для нас стало то, что фактически из всех возможностей физического движка наиболее надёжным в плане предотвращения промахов предсказаний является построение системы взаимодействия и передвижения объектов на коротких квантах постоянной скорости и рейкастах.
Какое-то время мы продолжали успешно жить с 2D-физикой: она полностью покрывала наши задачи и потребности геймдизайна, и в целом была очень удачным решением. Конечно, были и минусы: нас не всегда устраивала её производительность, но подходящих альтернатив на рынке opensource всё равно не было, а писать что-то своё было слишком энергозатратно. По результатам профайлинга из более сотни систем ECS, исполняющихся в одном тике симуляции, системы на физическом движке оказались наиболее прожорливыми. Кроме того, в библиотеке отсутствует множество оптимизаций на основе геометрии физических тел и их симметрии, которые могли бы оказаться действительно полезными. Также смущает ООП-направленность кода библиотеки и работа с индивидуальными телами, а не пакетами данных, что было бы куда оптимальнее для физического движка. И да ― в итоге разработчик всё-таки забросил библиотеку.
Через какое-то время в геймдизайне нашей игры всё же появились новые требования, предполагающие использование 3D-физики, и оказалось, что превентивно написанный фасад физики во многом ошибался и совершенно не был приспособлен к новым реалиям.
К вопросам о том, как, зачем и почему мы заменили двумерный физический движок на трёхмерный, мы ещё вернёмся в будущих статьях. А пока спасибо за внимание, и надеюсь, что после этого материала взаимодействие ECS с внешними системами стало чуточку понятнее.
На наши предыдущие статьи по теме:
А так же:
Для начала разберёмся, для чего же нужен физический движок. Универсального ответа здесь нет: в каждой игре он служит для своей цели. Некоторые игры используют физические движки для корректной симуляции поведения объектов в мире, чтобы достичь эффекта погружения игрока. В других физика является основой геймплея ― к таковым относятся, например, Angry Birds и Red Faction. Ещё существуют «песочницы», в которых физические законы отличаются от привычных и таким образом делают геймплей более интересным и необычным (Portal, A Slower Speed of Light).
С точки зрения программирования физический движок позволяет упростить процесс симуляции поведения объектов в игре. По сути он является библиотекой, в которой хранятся описания физических свойств предметов. При наличии физического движка нам не нужно самим разрабатывать систему взаимодействия тел и универсальные законы, по которым будет жить игровой мир. Это экономит кучу времени и сил на разработку.

На схеме выше описаны сущность Player, её компоненты и их данные, и системы, которые работают с игроком и его компонентами. Ключевым объектом на схеме является игрок: он может перемещаться в пространстве — компоненты Transform и Movement, система MoveSystem; имеет некоторое кол-во здоровья и может погибнуть — компонент Health, Damage, система DamageSystem; после смерти появляется на точке возрождения (respawn) — компонент Transform для положения, система RespawnSystem; может быть неуязвимым — компонент Invincible.
В чём же особенности реализации игровой физики для шутеров?
В нашей игре нет сложных физических взаимодействий, но существует ряд вещей, для которых физический движок всё-таки нужен. Изначально мы планировали использовать его для перемещения персонажа в мире в соответствии с заданными законами. Обычно это осуществляется путём сообщения телу некоего импульса или постоянной скорости, после чего посредством метода Simulate/Update библиотеки все зарегистрированные в ней тела симулируются ровно на один шаг вперёд.
В шутерах 3D-физику часто используют не только для симуляции перемещений персонажа, но и для корректной обработки баллистики пуль и ракет, прыжков, взаимодействия персонажей друг с другом и окружением. Если шутер претендует на реалистичность и стремится передать настоящие ощущения процесса стрельбы, физический движок ему просто необходим. Когда игрок стреляет из дробовика по цели, он ожидает получить опыт и результат, максимально похожий на тот, что ему уже знаком по многолетней игре в шутеры, ― нечто кардинально новое его с большой вероятностью неприятно удивит.
Но в случае нашей игры существует ряд ограничений. Поскольку наш шутер мобильный, он не предполагает сложных взаимодействий персонажей друг с другом и с окружающим миром, не требует красивой баллистики, разрушаемости, прыжков по неровной поверхности. Но в то же время и по той же причине есть очень жесткие требования по трафику. 3D-физика в этом случае была бы излишней: она использовала бы лишь малую часть своих вычислительных ресурсов и генерировала ненужные данные, которые в условиях мобильной сети и постоянной синхронизации клиента с сервером по UDP занимали бы слишком много места. Тут стоит напомнить, что в нашей сетевой модели ещё присутствуют такие вещи, как Prediction и Reconciliation, которые также предполагают проведение расчётов на клиенте. В результате получаем, что наша физика должна работать максимально быстро, чтобы успешно запускаться и работать на мобильных устройствах, не мешая при этом рендеру и другим подсистемам клиента.
Итак, 3D-физика нам не подходила. Но здесь стоит вспомнить о том, что даже если игра выглядит как трёхмерная, не факт, что физика в ней реализована тоже трёхмерная: всё определяет характер взаимодействия объектов друг с другом. Зачастую эффекты, которые невозможно покрыть 2D-физикой, либо кастомизируются ― то есть, пишется логика, внешне напоминающая трёхмерные взаимодействия, ― либо просто заменяются на визуальные эффекты, не влияющие на геймплей. В Heroes of the Storm, Defense of the Ancients, League of Legends двумерная физика способна обеспечивать все геймплейные возможности игры, не влияя негативно на качество картинки или ощущение правдоподобности создаваемого геймдизайнерами и художниками мира. Так, например, в этих играх есть прыгающие персонажи, но физического смысла в высоте их прыжка нет, поэтому всё сводится к двумерной симуляции и установке какого-нибудь флага вида _isInTheAir, когда персонаж находится в воздухе, ― он учитывается при расчёте логики.
Так было решено использовать 2D-физику. Игру мы пишем на Unity, но сервер используем Unity-less .net, который язык Unity не понимает. Поскольку львиная доля кода симуляции пошарена между клиентом и сервером, мы стали подыскивать что-то кроссплатформенное ― а именно, физическую библиотеку, написанную на чистом C# без использования нативного кода, чтобы исключить опасность краша мобильных платформ. Более того, принимая во внимание специфику работы шутеров, в частности ― постоянные перемотки на сервере с целью определения, куда стрелял игрок, нам было важно, чтобы библиотека могла работать с историей ― то есть, можно было дёшево посмотреть положение тел N кадров назад во времени. И, конечно, проект не должен быть заброшенным: важно, чтобы автор поддерживал его и мог быстро исправить баги, если таковые найдутся в процессе эксплуатации.
Как оказалось, на тот момент очень мало библиотек могли удовлетворить нашим требованиям. Фактически, нам подходила только одна ― VolatilePhysics.
Библиотека примечательна тем, что работает как с Unity, так и с Unity-less решениями, а также позволяет делать рейкасты в прошлое состояние объектов из коробки, т.е. подходит для логики шутеров. Кроме того, удобство библиотеки заключается в том, что механизм контроля запуска симуляции Simulate() позволяет произвести её в любой момент, когда это будет необходимо клиенту. И ещё одна фишка ― возможность записывать дополнительные данные в физическое тело. Это может быть полезно при адресации объекта из симуляции в результатах рейкастов ― правда, при этом сильно снижается производительность.
Сделав пару тестов и убедившись, что клиент и сервер хорошо взаимодействуют с VolatilePhysics без падений системы, мы остановили свой выбор на ней.
Как мы вписали библиотеку в привычный порядок работы с ECS и что из этого вышло
Первым шагом при работе с VolatilePhysics является создание физического мира VoltWorld. Он представляет из себя прокси-класс, с которым и происходит основная работа: настройка, симуляция данных об объектах, рейкасты и т. д. Мы обернули его в специальный фасад, чтобы можно было в будущем сменить реализацию библиотеки на что-нибудь другое. Код фасада выглядел так:
Посмотреть код
public sealed class PhysicsWorld
{
public const int HistoryLength = 32;
private readonly VoltWorld _voltWorld;
private readonly Dictionary<uint, VoltBody> _cache = new Dictionary<uint, VoltBody>();
public PhysicsWorld(float deltaTime)
{
_voltWorld = new VoltWorld(HistoryLength) { DeltaTime = deltaTime };
}
public bool HasBody(uint tag)
{
return _cache.ContainsKey(tag);
}
public VoltBody GetBody(uint tag)
{
VoltBody body;
_cache.TryGetValue(tag, out body);
return body;
}
public VoltRayResult RayCast(Vector2 origin, Vector2 direction, float distance, VoltBodyFilter filter, int ticksBehind)
{
var ray = new VoltRayCast(origin, direction.normalized, distance);
var result = new VoltRayResult();
_voltWorld.RayCast(ref ray, ref result, filter, ticksBehind);
return result;
}
public VoltRayResult CircleCast(Vector2 origin, Vector2 direction, float distance, float radius, VoltBodyFilter filter, int ticksBehind)
{
var ray = new VoltRayCast(origin, direction.normalized, distance);
var result = new VoltRayResult();
_voltWorld.CircleCast(ref ray, radius, ref result, filter, ticksBehind);
return result;
}
public void Update()
{
_voltWorld.Update();
}
public void Update(uint tag)
{
var body = _cache[tag];
_voltWorld.Update(body, true);
}
public void UpdateBody(uint tag, Vector2 position, float angle)
{
var body = _cache[tag];
body.Set(position, angle);
}
public void CreateStaticCircle(Vector2 origin, float radius, uint tag)
{
var shape = _voltWorld.CreateCircleWorldSpace(origin, radius, 1f, 0f, 0f);
var body = _voltWorld.CreateStaticBody(origin, 0, shape);
body.UserData = tag;
}
public void CreateDynamicCircle(Vector2 origin, float radius, uint tag)
{
var shape = _voltWorld.CreateCircleWorldSpace(origin, radius, 1f, 0f, 0f);
var body = _voltWorld.CreateDynamicBody(origin, 0, shape);
body.UserData = tag;
body.CollisionFilter = StaticCollisionFilter;
_cache.Add(tag, body);
}
public void CreateStaticSquare(Vector2 origin, float rotationAngle, Vector2 extents, uint tag)
{
var shape = _voltWorld.CreatePolygonBodySpace(extents.GetRectFromExtents(), 1, 0, 0);
var body = _voltWorld.CreateStaticBody(origin, rotationAngle, shape);
body.UserData = tag;
}
public void CreateDynamicSquare(Vector2 origin, float rotationAngle, Vector2 extents, uint tag)
{
var shape = _voltWorld.CreatePolygonBodySpace(extents.GetRectFromExtents(), 1, 0, 0);
var body = _voltWorld.CreateDynamicBody(origin, rotationAngle, shape);
body.UserData = tag;
body.CollisionFilter = StaticCollisionFilter;
_cache.Add(tag, body);
}
public IEnumerable<VoltBody> GetBodies()
{
return _voltWorld.Bodies;
}
private static bool StaticCollisionFilter(VoltBody a, VoltBody b)
{
return b.IsStatic;
}
}При создании мира указывается величина истории ― количество состояний мира, которое библиотека будет хранить. В нашем случае их число равнялось 32: 30 кадров в секунду нам понадобится исходя из требования к обновлению логики и ещё 2 дополнительных на случай, если в процессе отладки мы выйдем за пределы истории. В коде также учтены прокинутые наружу методы, порождающие физические тела, и различного рода рейкасты.
Как мы помним из предыдущих статей, мир ECS по сути вращается вокруг регулярного вызова методов Execute для всех входящих в него систем. В нужных местах каждой системы мы используем вызовы к нашему фасаду. Изначально мы не писали никакого батчинга к вызову физического движка, хотя такие мысли были. Внутри фасада происходит вызов Update() физического мира, и библиотека симулирует все взаимодействия объектов, произошедшие за кадр.
Таким образом, работа с физикой сводится к двум составляющим: к равномерному передвижению тел в пространстве за один кадр и множеству рейкастов, необходимых для стрельбы, правильной работы эффектов и множества других вещей. Особенно актуальны рейкасты в историю состояний физических тел.
По результатам наших тестов мы быстро поняли, что библиотека очень плохо работает с разными скоростями, и на определённой скорости тела легко начинают проходить сквозь стены. Настроек, связанных с continuous collision detection, для решения этой проблемы в нашем движке предусмотрено не было. Но альтернатив нашему решению на рынке на тот момент не существовало, поэтому пришлось придумывать свой вариант передвижения объектов по миру и синхронизации данных физики с ECS. Так, например, наш код для системы передвижения выглядит следующим образом:
Посмотреть код
using System;
...
using Volatile;
public sealed class MovePhysicsSystem : ExecutableSystem
{
private readonly PhysicsWorld _physicsWorld;
private readonly CollisionFilter _moveFilter;
private readonly VoltBodyFilter _collisionFilterDelegate;
public MovePhysicsSystem(PhysicsWorld physicsWorld)
{
_physicsWorld = physicsWorld;
_moveFilter = new CollisionFilter(true, CollisionLayer.ExplosiveBarrel);
_collisionFilterDelegate = _moveFilter.Filter;
}
public override void Execute(GameState gs)
{
_moveFilter.State = gs;
foreach (var pair in gs.WorldState.Movement)
{
ExecuteMovement(gs, pair.Key, pair.Value);
}
_physicsWorld.Update();
foreach (var pair in gs.WorldState.PhysicsDynamicBody)
{
if(pair.Value.IsAlive)
{
ExecutePhysicsDynamicBody(gs, pair.Key);
}
}
}
public override void Execute(GameState gs, uint avatarId)
{
_moveFilter.State = gs;
var movement = gs.WorldState.Movement[avatarId];
if (movement != null)
{
ExecuteMovement(gs, avatarId, movement);
_physicsWorld.Update(avatarId);
var physicsDynamicBody = gs.WorldState.PhysicsDynamicBody[avatarId];
if (physicsDynamicBody != null && physicsDynamicBody.IsAlive)
ExecutePhysicsDynamicBody(gs, avatarId);
}
}
private void ExecutePhysicsDynamicBody(GameState gs, uint entityId)
{
var body = _physicsWorld.GetBody(entityId);
if (body != null)
{
var transform = gs.WorldState.Transform[entityId];
transform.Position = body.Position;
}
}
private void ExecuteMovement(GameState gs, uint entityId, Movement movement)
{
var body = _physicsWorld.GetBody(entityId);
if (body != null)
{
float raycastRadius;
if (CalculateRadius(gs, entityId, out raycastRadius))
{
return;
}
body.AngularVelocity = 0;
body.LinearVelocity = movement.Velocity;
var movPhysicInfo = gs.WorldState.MovementPhysicInfo[entityId];
var collisionDirection = CircleRayCastSpeedCorrection(body, GameState.TickDurationSec, raycastRadius);
CheckMoveInWall(movement, movPhysicInfo, collisionDirection, gs.WorldState.Transform[entityId]);
}
}
private static bool CalculateRadius(GameState gs, uint id, out float raycastRadius)
{
raycastRadius = 0;
var circleShape = gs.WorldState.DynamicCircleCollider[id];
if (circleShape != null)
{
raycastRadius = circleShape.Radius;
}
else
{
var boxShape = gs.WorldState.DynamicBoxCollider[id];
if (boxShape != null)
{
raycastRadius = boxShape.RaycastRadius;
}
else
{
gs.Log.Error(string.Format("Physics body {0} doesn't contains shape!", id));
return true;
}
}
return false;
}
private static void CheckMoveInWall(Movement movement, MovementPhysicInfo movPhysicInfo,
Vector2 collisionDirection, Transform transform)
{
// 60 is the max angle when player move in wall and can shoot through the wall from weapon without target.
const float maxAngleToWall = 60;
if (movement.Velocity.IsEqual(Vector2.zero))
{
if (movPhysicInfo.LastCollisionDirection.IsEqual(Vector2.zero))
{
var angleToCollision = transform.Angle.GetDirection().CalculateAbsoluteAngleInDegrees(movPhysicInfo.LastCollisionDirection);
movPhysicInfo.TurnOnWall = angleToCollision <= maxAngleToWall;
}
return;
}
movPhysicInfo.LastCollisionDirection = collisionDirection * -1f;
if (movPhysicInfo.LastCollisionDirection.IsEqual(Vector2.zero))
{
movPhysicInfo.TurnOnWall = false;
movPhysicInfo.LastCollisionDirection = collisionDirection;
}
else
{
var angleToCollision = transform.Angle.GetDirection().CalculateAbsoluteAngleInDegrees(movPhysicInfo.LastCollisionDirection);
movPhysicInfo.TurnOnWall = angleToCollision <= maxAngleToWall;
}
}
// I can't believe we are using a physics engine and have to write such kludges
private Vector2 CircleRayCastSpeedCorrection(VoltBody targetBody, float deltaSeconds, float rayCastRadius)
{
if (rayCastRadius <= 0)
{
return Vector2.zero;
}
var speed = targetBody.LinearVelocity;
var position = targetBody.Position;
var direction = speed * deltaSeconds;
var rayCastResult = _physicsWorld.CircleCast(position + direction.normalized * 0.1f, direction, direction.magnitude, rayCastRadius, _collisionFilterDelegate, 0);
if (rayCastResult.Body == null)
{
return Vector2.zero;
}
var magSpeed = speed.magnitude;
if (rayCastResult.Distance > 0)
{
var penetratingDistance = magSpeed * deltaSeconds - rayCastResult.Distance;
var sinVelocityEdge = Vector2.Dot(-speed.normalized, rayCastResult.Normal);
var biasSpeed = penetratingDistance * sinVelocityEdge / deltaSeconds;
var biasVector = rayCastResult.Normal * biasSpeed * 1.1f;
var resultVelocity = speed + biasVector;
if (magSpeed <= 0)
{
resultVelocity = Vector2.zero;
}
targetBody.LinearVelocity = resultVelocity;
return rayCastResult.Normal;
}
var destination = rayCastResult.Body.Position;
direction = destination - position;
var rayCastResultToBody =
_physicsWorld.RayCast(position, direction, direction.magnitude, _collisionFilterDelegate, 0);
if (rayCastResultToBody.IsValid)
targetBody.LinearVelocity = rayCastResultToBody.Normal * magSpeed * deltaSeconds;
return rayCastResultToBody.Normal;
}
}Идея состоит в том, что перед каждым ходом персонажа мы делаем CircleCast по направлению его движения с целью определения, есть ли перед ним препятствие. CircleCast нужен потому, что проекции персонажей в игре представляют круг, и мы не хотим, чтобы они застревали в углах между разными геометриями. Затем мы считаем приращение скорости и назначаем объекту физического мира это значение в качестве его скорости за один кадр. Следующим шагом будет вызов метода симуляции физического движка Update(), который двигает все необходимые нам объекты, попутно записывая старое состояние в историю. После того, как симуляция внутри движка завершилась, мы считываем эти просимулированные данные, копируем их в компонент Transform нашего ECS и далее продолжаем работать уже с ними, в частности ― рассылаем их по сети.
Такой подход в обновлении физики небольшими контролируемыми порциями данных о скорости перемещения персонажа оказался очень эффективным при борьбе с расхождениями физики на клиенте и сервере. И поскольку наша физика не детерминированная ― то есть, при одних и тех же входных данных результат симуляции может различаться, ― было много дискуссий на тему того, стоит ли вообще её использовать, и делает ли кто-либо в индустрии что-то подобное, не имея на руках детерминированного физического движка. К счастью, мы нашли отличный доклад от разработчиков NetherRealm Studios на Game Developers Conference о сетевой составляющей их игр и поняли, что такой подход действительно имеет место быть. Собрав полностью систему и прогнав её на нескольких тестах, мы получили порядка 50 лже-предсказаний за 9000 тиков, т. е. за время пятиминутного боя. Такое количество промахов предсказаний легко нивелируется механизмом Reconciliation и визуальной интерполяцией позиции игрока. Ошибки, возникающие при частом обновлении физики вручную при помощи собственных данных, являются незначительными, поэтому визуальная интерполяция может проходить довольно быстро ― она нужна лишь для того, чтобы не возникало визуального скачка модели персонажа.
Для проверки совпадения состояний клиента и сервера мы использовали самописный класс следующего вида:
Посмотреть код
using PS.Logs.Unity;
/// <summary>
/// Compares the same avatar in two states. Compares the values potentially
/// affected by prediction.
/// </summary>
public sealed class GameStateComparer : IGameStateComparer
{
public bool IsSame(GameState s1, GameState s2, uint avatarId)
{
if (s1 == null && s2 != null ||
s1 != null && s2 == null)
{
return false;
}
if (s1 == null && s2 == null)
return false;
var entity1 = s1.WorldState[avatarId];
var entity2 = s2.WorldState[avatarId];
if (entity1 == null && entity2 == null)
{
return false;
}
if (entity1 == null || entity2 == null)
{
LogManager.Debug("entity is different");
return false;
}
if (s1.Time != s2.Time)
{
LogManager.Warning(string.Format("Trying to compare states with different time! Predicted time: {0} Server time: {1}",
s1.Time, s2.Time));
return false;
}
if (s1.WorldState.Transform[avatarId] != s2.WorldState.Transform[avatarId])
{
LogManager.Debug("Transform is different");
return false;
}
// ... some code ...
return true;
}
}При необходимости его можно автоматизировать, но мы этого делать не стали, хотя и думали об этом в будущем.
Код сравнения трансформов:
Посмотреть код
public static bool operator ==(Transform a, Transform b)
{
if ((object)a == null && (object)b == null)
{
return true;
}
if ((object)a == null && (object)b != null)
{
return false;
}
if ((object)a != null && (object)b == null)
{
return false;
}
if (Math.Abs(a.Angle - b.Angle) > 0.01f)
{
return false;
}
if (Math.Abs(a.Position.x - b.Position.x) > 0.01f || Math.Abs(a.Position.y - b.Position.y) > 0.01f)
{
return false;
}
return true;
}Первые трудности
Не возникало никаких проблем с симуляцией движения, пока его можно было проецировать на 2D-плоскость, ― физика в таких случаях работала очень хорошо, но в один момент пришли геймдизайнеры и сказали: «Хотим гранаты!» И мы подумали, чтобы сильно ничего не менять, почему бы не сэмулировать 3D-полет физического тела, имея на руках только 2D-данные.
И ввели понятие высоты для некоторых объектов.
Как выглядит закон изменения высоты с течением времени для брошенного тела, проходят на уроках физики в восьмом классе, так что решение по баллистике оказалось тривиальным. Но уже не столь тривиальным получилось решение с коллизиями. Давайте представим себе этот случай: граната при полёте должна или столкнуться со стеной, или перелететь её в зависимости от своей текущей высоты и высоты стены. Решать задачу будем только в двумерном мире, где граната представлена кругом, а стена ― прямоугольником.

Вид геометрии объектов для решения задачи.
В первую очередь мы отключили взаимодействие динамического тела гранаты с другими статическими и динамическими телами. Это нужно для того, чтобы сосредоточиться на поставленной цели. В нашей задаче граната должна уметь проходить сквозь другие объекты и «перелетать» стену, когда их проекции на двумерной плоскости пересекаются друг с другом. При обычном взаимодействии два объекта не могут проходить друг сквозь друга, и всё же в случае гранаты с кастомной логикой перемещения и высотой мы разрешили ей это делать при определённых условиях.
Мы ввели для гранаты отдельный компонент GrenadeMovement, в котором завели понятие высоты:
[Component]
public class GrenadeMovement
{
public float Height;
[DontPack]
public Vector2 Velocity;
[DontPack]
public float VerticalVelocity;
public GrenadeMovement(float height, Vector2 velocity, float verticalVelocity) { }
}Теперь граната имеет координату высоты, однако остальному миру эта информация ничего не даёт. Поэтому мы решили схитрить и добавили следующее условие: граната может перелетать через стены, но только определённой высоты. Таким образом, всё определение коллизий свелось к проверке коллизий проекции и сравнению высоты стены со значением поля GrenadeMovement.Height. Если высота полёта гранаты оказывается меньше, она сталкивается со стеной, иначе может спокойно продолжать движение по своей траектории, в том числе и в 2D-пространстве.
В первой итерации граната просто падала при нахождении пересечений, но затем мы добавили упругие столкновения, и она стала вести себя практически неотличимо от того результата, который мы получили бы в 3D.
Полный код расчёта траектории движения гранаты и упругих коллизий приведён ниже:
Посмотреть код
using System;
// ... some code ...
using Volatile;
namespace Common.WorldState
{
public sealed class GrenadeMovementSystem : ExecutableSystem
{
private struct Projection
{
public float Min;
public float Max;
}
private float _r;
private readonly Vector2[] _vertices = new Vector2[4];
private readonly Vector2[] _verticesV = new Vector2[4];
private Vector2 _Vunit;
private Vector2 _VTunit;
private Projection _wallProj1;
private Projection _wallProj2;
private Projection _wallProj1V;
private Projection _wallProj2V;
private const float CollisionPrecision = 1e-3f;
private static readonly float HalfSlope = Mathf.Cos(Mathf.PI / 4.0f);
private readonly ContactPointList _contactPoints = new ContactPointList(3);
public override void Execute(GameState gs)
{
var settings = gs.RuleBook.GrenadeConfig[1];
_r = settings.R;
var floorDampeningPerTick = (float)Math.Pow(settings.FloorDampening, 1.0 / GameState.Hz);
foreach (var grenade in gs.WorldState.GrenadeMovement)
{
// Gravity must take effect before collision
// because contact with walls may and will adjust vertical velocity
// and penetration will even move the ball up.
grenade.Value.VerticalVelocity -= settings.Gravity * GameState.TickDurationSec;
grenade.Value.Height += grenade.Value.VerticalVelocity * GameState.TickDurationSec;
// prevent falling through floor
if (grenade.Value.Height <= _r)
{
// slow down horizontal movement by floor friction
// actually, friciton is simplified to just dampening coefficient
var spdH = grenade.Value.Velocity.sqrMagnitude;
var spdV = grenade.Value.VerticalVelocity;
var cos = spdH / Mathf.Sqrt(spdH * spdH + spdV * spdV);
grenade.Value.Velocity *= floorDampeningPerTick * cos;
// slow down vertical movement
grenade.Value.VerticalVelocity = settings.FloorRestitution * Math.Abs(grenade.Value.VerticalVelocity);
// move up to the floor level
grenade.Value.Height = _r;
}
// A collision will stop the ball and change its velocity.
// Otherwise it will be moved by velocity
PerformCollisionAndMovement(gs, grenade.Key, grenade.Value);
}
}
private void PerformCollisionAndMovement(GameState gs, uint id, GrenadeMovement grenade)
{
var settings = gs.RuleBook.GrenadeConfig[1];
var velocity = grenade.Velocity * GameState.TickDurationSec;
var trans = gs.WorldState.Transform[id];
var position = trans.Position;
_Vunit = velocity.normalized;
_VTunit = new Vector2(-_Vunit.y, _Vunit.x);
_vertices[0] = position + _VTunit * _r;
_vertices[1] = position - _VTunit * _r;
_vertices[2] = _vertices[1] + velocity;
_vertices[3] = _vertices[0] + velocity;
_contactPoints.Reset();
int collisions = 0;
var grenProj1V = ProjectCapsule(_Vunit, _vertices, position, velocity);
var grenProj2V = ProjectCapsule(_VTunit, _vertices, position, velocity);
collisions += CollideWithStaticBoxes(gs, id, position, velocity, grenade, grenProj1V, grenProj2V);
collisions += CollideWithCircles(gs, gs.RuleBook.StaticCircleCollider, gs.RuleBook.Transform, id, position, velocity, grenade, grenProj1V, grenProj2V, (CollisionLayer)~0);
collisions += CollideWithCircles(gs, gs.WorldState.DynamicCircleCollider, gs.WorldState.Transform, id, position, velocity, grenade, grenProj1V, grenProj2V, ~CollisionLayer.Character);
if (collisions == 0)
{
trans.Position += velocity;
}
else
{
var contactSuperposition = CalculateContactSuperposition();
trans.Position += velocity * contactSuperposition.TravelDistance;
var reflectedVelocity = grenade.Velocity - 2.0f * Vector2.Dot(grenade.Velocity, contactSuperposition.Normal) * contactSuperposition.Normal;
reflectedVelocity *= settings.WallRestitution;
#if DEBUG_GRENADES
gs.Log.Debug("contact"
+ "\n\ttravel " + contactSuperposition.TravelDistance
+ "\n\tcontactNormal " + contactSuperposition.Normal.x + ":" + contactSuperposition.Normal.y
+ "\n\treflected V " + reflectedVelocity.x + ":" + reflectedVelocity.y);
#endif
grenade.Velocity = reflectedVelocity;
}
}
private int CollideWithStaticBoxes(
GameState gs,
uint id,
Vector2 position,
Vector2 velocity,
GrenadeMovement grenade,
Projection grenProj1V,
Projection grenProj2V)
{
var settings = gs.RuleBook.GrenadeConfig[1];
var collisions = 0;
// TODO spatial query
foreach (var collider in gs.RuleBook.StaticBoxCollider)
{
var wall = collider.Value;
var transform = gs.RuleBook.Transform[collider.Key];
var colliderData = gs.RuleBook.PrecomputedColliderData[collider.Key];
// test projection to V
_wallProj1V = ProjectPolygon(_Vunit, colliderData.Vertices);
if (!Overlap(_wallProj1V, grenProj1V)) continue;
// test projection to VT
_wallProj2V = ProjectPolygon(_VTunit, colliderData.Vertices);
if (!Overlap(_wallProj2V, grenProj2V)) continue;
// test projection to wall axis 1
_wallProj1 = ProjectPolygon(colliderData.Axis1, colliderData.Vertices);
var grenProj1 = ProjectCapsule(colliderData.Axis1, _vertices, position, velocity);
if (!Overlap(_wallProj1, grenProj1)) continue;
// test projection to wall axis 2
_wallProj2 = ProjectPolygon(colliderData.Axis2, colliderData.Vertices);
var grenProj2 = ProjectCapsule(colliderData.Axis2, _vertices, position, velocity);
if (!Overlap(_wallProj2, grenProj2)) continue;
var lowWall = wall.Height < settings.TallWallHeight;
if (lowWall)
{
// the wall is too far below, ignore it completely
if (grenade.Height > wall.Height + _r) continue;
// if grenade if falling down, it can bounce off the top of the wall
if (grenade.VerticalVelocity < 0f)
{
if (grenade.Height > wall.Height - _r)
{
var localPV = WorldToBoxLocal(transform.Position, colliderData, position + velocity);
#if DEBUG_GRENADES
gs.Log.Debug("fall on wall"
+ "\n\tP+V " + (P.x + V.x) + ":" + (P.y + V.y)
+ "\n\tlocal " + localPV.x + ":" + localPV.y
+ "\n\tH w " + wall.Height + " g " + grenade.Height
);
#endif
if (Math.Abs(localPV.x) < wall.Size.x * 0.5f || Math.Abs(localPV.y) < wall.Size.y * 0.5f)
{
grenade.Height = wall.Height + _r;
grenade.VerticalVelocity = settings.WallRestitution * Math.Abs(grenade.VerticalVelocity);
continue;
}
}
}
}
// collision detected
// try to find minimal V before collision
var scaleV = CalcTranslationScaleBeforeCollision(CheckBoxCollision, colliderData, 0, position, velocity);
var contactPoint = CalcBoxContactPoint(transform.Position, wall, colliderData, position);
#if DEBUG_GRENADES
gs.Log.Debug("collision grenade #" + id + " with static box #" + collider.Key
+ "\n\tP=" + P.x + ":" + P.y
+ "\n\tV=" + V.x + ":" + V.y + " scale=" + scaleV
+ "\n\tP+Vs=" + (P.x + V.x * scaleV) + ":" + (P.y + V.y * scaleV)
+ "\n\twall pos " + transform.Position.x + ":" + transform.Position.y + " sz " + wall.Size.x + ":" + wall.Size.y + " angle " + transform.Angle
+ "\n\tproj V w " + _wallProj1V.Min + ":" + _wallProj1V.Max + " g " + grenProj1V.Min + ":" + grenProj1V.Max + " overlap=" + Overlap(_wallProj1V, grenProj1V)
+ "\n\tproj VT w " + _wallProj2V.Min + ":" + _wallProj2V.Max + " g " + grenProj2V.Min + ":" + grenProj2V.Max + " overlap=" + Overlap(_wallProj2V, grenProj2V)
+ "\n\taxis1 " + colliderData.Axis1.x + ":" + colliderData.Axis1.y
+ "\n\tproj 1 w " + _wallProj1.Min + ":" + _wallProj1.Max + " g " + grenProj1.Min + ":" + grenProj1.Max + " overlap=" + Overlap(_wallProj1, grenProj1)
+ "\n\taxis2 " + colliderData.Axis2.x + ":" + colliderData.Axis2.y
+ "\n\tproj 2 w " + _wallProj2.Min + ":" + _wallProj2.Max + " g " + grenProj2.Min + ":" + grenProj2.Max + " overlap=" + Overlap(_wallProj2, grenProj2)
+ "\n\tpoint " + contactPoint.Point.x + ":" + contactPoint.Point.y + " dotV " + Vector2.Dot(P - contactPoint.Point, V)
);
#endif
// ignore colliders that are behind
if (Vector2.Dot(position - contactPoint.Point, velocity) >= 0.0f) continue;
contactPoint.TravelDistance = velocity.magnitude * scaleV;
_contactPoints.Add(ref contactPoint);
collisions++;
}
return collisions;
}
private bool CheckBoxCollision(PrecomputedColliderData colliderData, int x, Vector2 position, Vector2 velocity)
{
_verticesV[0] = _vertices[0];
_verticesV[1] = _vertices[1];
_verticesV[2] = _vertices[1] + velocity;
_verticesV[3] = _vertices[0] + velocity;
// test projection to V
var grenProj1V = ProjectCapsule(_Vunit, _verticesV, position, velocity);
if (!Overlap(_wallProj1V, grenProj1V)) return false;
// testing projection to VT would be redundant
// test projection to wall axis 1
var grenProj1 = ProjectCapsule(colliderData.Axis1, _verticesV, position, velocity);
if (!Overlap(_wallProj1, grenProj1)) return false;
// test projection to wall axis 2
var grenProj2 = ProjectCapsule(colliderData.Axis2, _verticesV, position, velocity);
if (!Overlap(_wallProj2, grenProj2)) return false;
return true;
}
private int CollideWithCircles(
GameState gs,
Table<CircleCollider> colliderTable,
Table<Transform> transformTable,
uint id,
Vector2 position,
Vector2 velocity,
GrenadeMovement grenade,
Projection grenProj1V,
Projection grenProj2V,
CollisionLayer collisionLayers)
{
var settings = gs.RuleBook.GrenadeConfig[1];
var collisions = 0;
foreach (var collider in colliderTable)
{
if ((int)collisionLayers != ~0)
{
var body = gs.WorldState.PhysicsDynamicBody[collider.Key];
if (body != null && (body.CollisionLayer & collisionLayers) == 0) continue;
}
var wall = collider.Value;
var transform = transformTable[collider.Key];
// test projection to V
_wallProj1V = ProjectCircle(_Vunit, transform.Position, wall.Radius);
if (!Overlap(_wallProj1V, grenProj1V)) continue;
// test projection to VT
_wallProj2V = ProjectCircle(_VTunit, transform.Position, wall.Radius);
if (!Overlap(_wallProj2V, grenProj2V)) continue;
// test distance from the circle wall to semicircles on capsule ends
var collisionDistance = (_r + wall.Radius) * (_r + wall.Radius);
if ((position - transform.Position).sqrMagnitude > collisionDistance) continue;
var distSqr = (position + velocity - transform.Position).sqrMagnitude;
if (distSqr > collisionDistance) continue;
var lowWall = wall.Height < settings.TallWallHeight;
if (lowWall)
{
// the wall is too far below, ignore it completely
if (grenade.Height > wall.Height + _r) continue;
// if grenade if falling down, it can bounce off the top of the wall
if (grenade.VerticalVelocity < 0f)
{
if (grenade.Height > wall.Height - _r)
{
#if DEBUG_GRENADES
gs.Log.Debug("grenade #" + id + " falls on wall"
+ "\n\tP+V " + (P.x + V.x) + ":" + (P.y + V.y)
+ "\n\tdist " + Mathf.Sqrt(distSqr)
+ "\n\tH w " + wall.Height + " g " + grenade.Height
);
#endif
if (distSqr < wall.Radius * wall.Radius)
{
grenade.Height = wall.Height + _r;
grenade.VerticalVelocity = settings.WallRestitution * Math.Abs(grenade.VerticalVelocity);
continue;
}
}
}
}
// collision detected
// try to find minimal V before collision
var scaleV = CalcTranslationScaleBeforeCollision(CheckCircleCollision, transform.Position, wall, position, velocity);
var contactPoint = CalcCircleContactPoint(transform.Position, wall, position);
#if DEBUG_GRENADES
gs.Log.Debug("collision grenade #" + id + " with circle #" + collider.Key
+ "\n\tP=" + P.x + ":" + P.y
+ "\n\tV=" + V.x + ":" + V.y + " scale=" + scaleV
+ "\n\tP+Vs=" + (P.x + V.x * scaleV) + ":" + (P.y + V.y * scaleV)
+ "\n\tcircle pos " + transform.Position.x + ":" + transform.Position.y + " r " + wall.Radius
+ "\n\tdist " + (transform.Position - (P + V * scaleV)).magnitude
+ "\n\tproj V w " + _wallProj1V.Min + ":" + _wallProj1V.Max + " g " + grenProj1V.Min + ":" + grenProj1V.Max + " overlap=" + Overlap(_wallProj1V, grenProj1V)
+ "\n\tproj VT w " + _wallProj2V.Min + ":" + _wallProj2V.Max + " g " + grenProj2V.Min + ":" + grenProj2V.Max + " overlap=" + Overlap(_wallProj2V, grenProj2V)
+ "\n\tpoint " + contactPoint.Point.x + ":" + contactPoint.Point.y + " dotV " + Vector2.Dot(P - contactPoint.Point, V)
);
#endif
// ignore colliders that are behind
if (Vector2.Dot(position - contactPoint.Point, velocity) >= 0.0f) continue;
contactPoint.TravelDistance = velocity.magnitude * scaleV;
_contactPoints.Add(ref contactPoint);
collisions++;
}
return collisions;
}
private bool CheckCircleCollision(Vector2 wallCentre, CircleCollider wall, Vector2 position, Vector2 velocity)
{
_verticesV[0] = _vertices[0];
_verticesV[1] = _vertices[1];
_verticesV[2] = _vertices[1] + velocity;
_verticesV[3] = _vertices[0] + velocity;
// test projection to V
var grenProj1V = ProjectCapsule(_Vunit, _verticesV, position, velocity);
if (!Overlap(_wallProj1V, grenProj1V)) return false;
// testing projection to VT would be redundant
// test distance from the circle wall to the semicircle on the second capsule end
var dSqr = (_r + wall.Radius) * (_r + wall.Radius);
return (position + velocity - wallCentre).sqrMagnitude < dSqr;
}
private static float CalcTranslationScaleBeforeCollision<TData1, TData2>(
Func<TData1, TData2, Vector2, Vector2, bool> collision,
TData1 colliderData1,
TData2 colliderData2,
Vector2 position,
Vector2 vector)
{
var min = 0.0f;
var max = 1.0f;
while (true)
{
var d = (max - min) * 0.5f;
if (d < CollisionPrecision) break;
var scale = min + d;
if (collision(colliderData1, colliderData2, position, vector * scale))
{
max = scale;
}
else
{
min = scale;
}
}
return min;
}
private ContactPoint CalculateContactSuperposition()
{
ContactPoint contactSuperposition;
_contactPoints.TryPopClosest(1000f, out contactSuperposition);
ContactPoint contact;
while (_contactPoints.TryPopClosest(contactSuperposition.TravelDistance, out contact))
{
contactSuperposition.Normal += contact.Normal;
}
contactSuperposition.Normal = contactSuperposition.Normal.normalized;
return contactSuperposition;
}
private static Projection ProjectPolygon(Vector2 axisNormalised, Vector2[] vertices)
{
Projection proj;
var d = Vector2.Dot(axisNormalised, vertices[0]);
proj.Min = d;
proj.Max = d;
for (var i = 1; i < vertices.Length; i++)
{
d = Vector2.Dot(axisNormalised, vertices[i]);
proj.Min = Mathf.Min(proj.Min, d);
proj.Max = Mathf.Max(proj.Max, d);
}
return proj;
}
private Projection ProjectCapsule(Vector2 axisNormalised, Vector2[] vertices, Vector2 p, Vector2 v)
{
var proj = ProjectPolygon(axisNormalised, vertices);
proj = AddCircleProjection(proj, axisNormalised, p, _r);
proj = AddCircleProjection(proj, axisNormalised, p + v, _r);
return proj;
}
private static Projection AddCircleProjection(Projection proj, Vector2 axisNormalised, Vector2 centre, float r)
{
var c = Vector2.Dot(axisNormalised, centre);
proj.Min = Mathf.Min(proj.Min, c - r);
proj.Max = Mathf.Max(proj.Max, c + r);
return proj;
}
private static Projection ProjectCircle(Vector2 axisNormalised, Vector2 centre, float r)
{
Projection proj;
var c = Vector2.Dot(axisNormalised, centre);
proj.Min = c - r;
proj.Max = c + r;
return proj;
}
private static bool Overlap(Projection p1, Projection p2)
{
return p1.Min < p2.Min ? p1.Max > p2.Min : p2.Max > p1.Min;
}
private static Vector2 WorldToBoxLocal(Vector2 wallCentre, PrecomputedColliderData colliderData, Vector2 position)
{
return new Vector2(
Vector2.Dot(colliderData.Axis1, position) - Vector2.Dot(colliderData.Axis1, wallCentre),
Vector2.Dot(colliderData.Axis2, position) - Vector2.Dot(colliderData.Axis2, wallCentre)
);
}
private static ContactPoint CalcBoxContactPoint(Vector2 wallCentre, BoxCollider wall, PrecomputedColliderData colliderData, Vector2 position)
{
var contactPoint = CaclBoxLocalContactPoint(wall.Size * 0.5f, WorldToBoxLocal(wallCentre, colliderData, position));
var worldAxisX = new Vector2(colliderData.Axis1.x, -colliderData.Axis1.y);
var worldAxisY = new Vector2(colliderData.Axis1.y, colliderData.Axis1.x);
contactPoint.Point = wallCentre + new Vector2(Vector2.Dot(worldAxisX, contactPoint.Point), Vector2.Dot(worldAxisY, contactPoint.Point));
contactPoint.Normal = new Vector2(Vector2.Dot(worldAxisX, contactPoint.Normal), Vector2.Dot(worldAxisY, contactPoint.Normal));
return contactPoint;
}
private static ContactPoint CaclBoxLocalContactPoint(Vector2 boxHalfSize, Vector2 localPosition)
{
ContactPoint localContactPoint = default(ContactPoint);
// cases are numbered like numpad keys
// 1, 2, 3
if (localPosition.y < -boxHalfSize.y)
{
// 1
if (localPosition.x < -boxHalfSize.x)
{
localContactPoint.Point = new Vector2(-boxHalfSize.x, -boxHalfSize.y);
localContactPoint.Normal = new Vector2(-HalfSlope, -HalfSlope);
}
// 2, 3
else
{
// 3
if (localPosition.x > boxHalfSize.x)
{
localContactPoint.Point = new Vector2(boxHalfSize.x, -boxHalfSize.y);
localContactPoint.Normal = new Vector2(HalfSlope, -HalfSlope);
}
// 2
else
{
localContactPoint.Point = new Vector2(localPosition.x, -boxHalfSize.y);
localContactPoint.Normal = new Vector2(0.0f, -1.0f);
}
}
}
// 4, 6, 7, 8, 9
else
{
// 7, 8, 9
if (localPosition.y > boxHalfSize.y)
{
// 7
if (localPosition.x < -boxHalfSize.x)
{
localContactPoint.Point = new Vector2(-boxHalfSize.x, boxHalfSize.y);
localContactPoint.Normal = new Vector2(-HalfSlope, HalfSlope);
}
// 8, 9
else
{
// 9
if (localPosition.x > boxHalfSize.x)
{
localContactPoint.Point = new Vector2(boxHalfSize.x, boxHalfSize.y);
localContactPoint.Normal = new Vector2(HalfSlope, HalfSlope);
}
// 8
else
{
localContactPoint.Point = new Vector2(localPosition.x, boxHalfSize.y);
localContactPoint.Normal = new Vector2(0.0f, 1.0f);
}
}
}
// 4, 6
else
{
// 4
if (localPosition.x < -boxHalfSize.x)
{
localContactPoint.Point = new Vector2(-boxHalfSize.x, localPosition.y);
localContactPoint.Normal = new Vector2(-1.0f, 0.0f);
}
// 6
else
{
localContactPoint.Point = new Vector2(boxHalfSize.x, localPosition.y);
localContactPoint.Normal = new Vector2(1.0f, 0.0f);
}
}
}
return localContactPoint;
}
private static ContactPoint CalcCircleContactPoint(Vector2 wallCentre, CircleCollider wall, Vector2 position)
{
ContactPoint contactPoint = default(ContactPoint);
contactPoint.Normal = (position - wallCentre).normalized;
contactPoint.Point = wallCentre + wall.Radius * contactPoint.Normal;
return contactPoint;
}
}
}Физику написали. Что дальше?
Игра живёт, развивается, и со временем нам стало необходимо каким-то образом отлаживать то, что происходит с её физическим движком на сервере. В одной из статей я уже описывал подробно отладку ECS на сервере. Что же до физики, у нас есть непосредственный визуальный редактор, который берёт данные из JSON, структура которых генерируется вместе с остальным лейаутом ECS. Выглядит этот редактор так:

Видно, что фактически у нас существует два «мира». Первый представляет из себя наш ECS, в котором мы описываем состояния объектов игры, в том числе их физические параметры. Второй мир ― физический ― создан библиотекой и, естественно, не написан в стиле ECS, но задачу синхронизации данных между этими мирами ECS берёт на себя. Важно, чтобы библиотека предоставляла API, с помощью которого можно управлять её данными, и их можно было и читать, и писать. Также очень важным выводом для нас стало то, что фактически из всех возможностей физического движка наиболее надёжным в плане предотвращения промахов предсказаний является построение системы взаимодействия и передвижения объектов на коротких квантах постоянной скорости и рейкастах.
Какое-то время мы продолжали успешно жить с 2D-физикой: она полностью покрывала наши задачи и потребности геймдизайна, и в целом была очень удачным решением. Конечно, были и минусы: нас не всегда устраивала её производительность, но подходящих альтернатив на рынке opensource всё равно не было, а писать что-то своё было слишком энергозатратно. По результатам профайлинга из более сотни систем ECS, исполняющихся в одном тике симуляции, системы на физическом движке оказались наиболее прожорливыми. Кроме того, в библиотеке отсутствует множество оптимизаций на основе геометрии физических тел и их симметрии, которые могли бы оказаться действительно полезными. Также смущает ООП-направленность кода библиотеки и работа с индивидуальными телами, а не пакетами данных, что было бы куда оптимальнее для физического движка. И да ― в итоге разработчик всё-таки забросил библиотеку.
Через какое-то время в геймдизайне нашей игры всё же появились новые требования, предполагающие использование 3D-физики, и оказалось, что превентивно написанный фасад физики во многом ошибался и совершенно не был приспособлен к новым реалиям.
К вопросам о том, как, зачем и почему мы заменили двумерный физический движок на трёхмерный, мы ещё вернёмся в будущих статьях. А пока спасибо за внимание, и надеюсь, что после этого материала взаимодействие ECS с внешними системами стало чуточку понятнее.
Полезные ссылки
На наши предыдущие статьи по теме:
- Общая игровая логика на клиенте и сервере
- Как мы писали сетевой код мобильного PvP шутера: синхронизация игрока на клиенте
- Как и почему мы написали свой ECS
- Как мы отлаживаем в браузере самописный ECS на игровом сервере
А так же:
