
Модульными называются роботы, структура которых может изменяться с помощью добавления узлов, самостоятельных по отдельности. Они могут быть полезны в разных областях — от разработки игр до медицины и космонавтики.
Под катом собрали перспективные проекты модульных роботов. Как они работают, каких бывают форм и какие у них проблемы в реализации — рассказываем в подборке.
M-Blocks. Прямиком из MIT
Одним из первопроходцев в мире модульной робототехники стал молодой инженер Джон Романишин. В 2013 году он создал схему для самосборки роботов. Небольшие кубики без внешних подвижных частей могут передвигаться, прыгать друг на друга и соединяться. Технология получила название M-Blocks.

M-Blocks, без корпуса. Источник
Презентация проекта
Поначалу мало кто верил в разработку. В 2011 году Джон показал дизайн M-Blocks профессору робототехники Даниэле Рус. Она сказала, что это невозможно сделать, но через два года показала проект своему коллеге, исследователю в Корнельском университете. Он подтвердил нереализуемость разработки.
Позже Даниэла признала ошибку и поддержала Джона. Через два года он продемонстрировал свою разработку на Международной конференции IROS, тем самым доказав работоспособность M-Blocks.
Демонстрация проекта Джона Романишина. Теперь уже совместно с профессором Даниэлой Рус.
Как это работает
Магии здесь нет: кубы могут перемещаться без внешних подвижных элементов.
Внутри каждого установлен маховик, вращающийся со скоростью 20 000 оборотов в минуту. В момент резкой остановки «создается» инерция, побуждающая куб двигаться в определенном направлении.
Чтобы кубы стыковались между собой, на ребрах каждого из них есть цилиндрические магниты. Когда два куба сближаются, магниты поворачиваются друг к другу разноименными полюсами.
Когда кубы далеко друг от друга, они передвигаются почти хаотично: прыгают в разные стороны и делают сальто. Зато вблизи работают по принципу «скользящего куба». Так называется эффект, когда один куб двигается вдоль другого, вокруг общей оси — намагниченного ребра.
Фрагмент из видеоролика
Вторая версия и штрих-коды
В первой версии M-Blocks кубы передвигались почти хаотично, с помощью динамики и магнитного воздействия. Им не хватало «осознанности».
Через шесть лет вышла вторая версия проекта. Кубы-роботы «научились» общаться друг с другом, используя систему, напоминающую штрих-код. На каждой из граней есть свой код для идентификации. Также в каждом блоке установлены датчики для считывания направлений и световых сигналов. Так они могут распознавать друг друга и собираться в нужные структуры.
Демонстрация работы M-Blocks 2.0. Обратите внимание на световую сигнализацию.
Мечты и перспективы
Сегодня проект M-Blocks поддерживают Национальный научный фонд и Amazon Robotics. Есть надежда на дальнейшую миниатюризацию устройства. Одна из целей проектов, подобных M-Blocks, — создать систему микроботов, способную собираться в сложные структуры.
Напрашивается пример из «Мстителей», — боевой костюм из микроскопических роботов. Но до этого еще далеко. Пока реальным кажется использование модульных роботов M-Blocks, например, в интерактивных играх.
«Мы хотим, чтобы сотни кубиков, разбросанных случайным образом по полу, могли идентифицировать друг друга, объединяться и собираться в стул, лестницу или стол», – Джон Романишин, основатель проекта M-Blocks.
 «Мы хотим, чтобы сотни кубиков, разбросанных случайным образом по полу, могли идентифицировать друг друга, объединяться и собираться в стул, лестницу или стол», – Джон Романишин, основатель проекта M-Blocks.
«Мы хотим, чтобы сотни кубиков, разбросанных случайным образом по полу, могли идентифицировать друг друга, объединяться и собираться в стул, лестницу или стол», – Джон Романишин, основатель проекта M-Blocks.Сферические роботы
FreeBOT
Еще один выходец Международной конференции IEEE/RSJ по интеллектуальным роботам (IROS) — проект ученых из университета Шэньчжэнь. В 2020 году они представили модульного робота FreeBOT.

FreeBOT. Источник
Как это работает
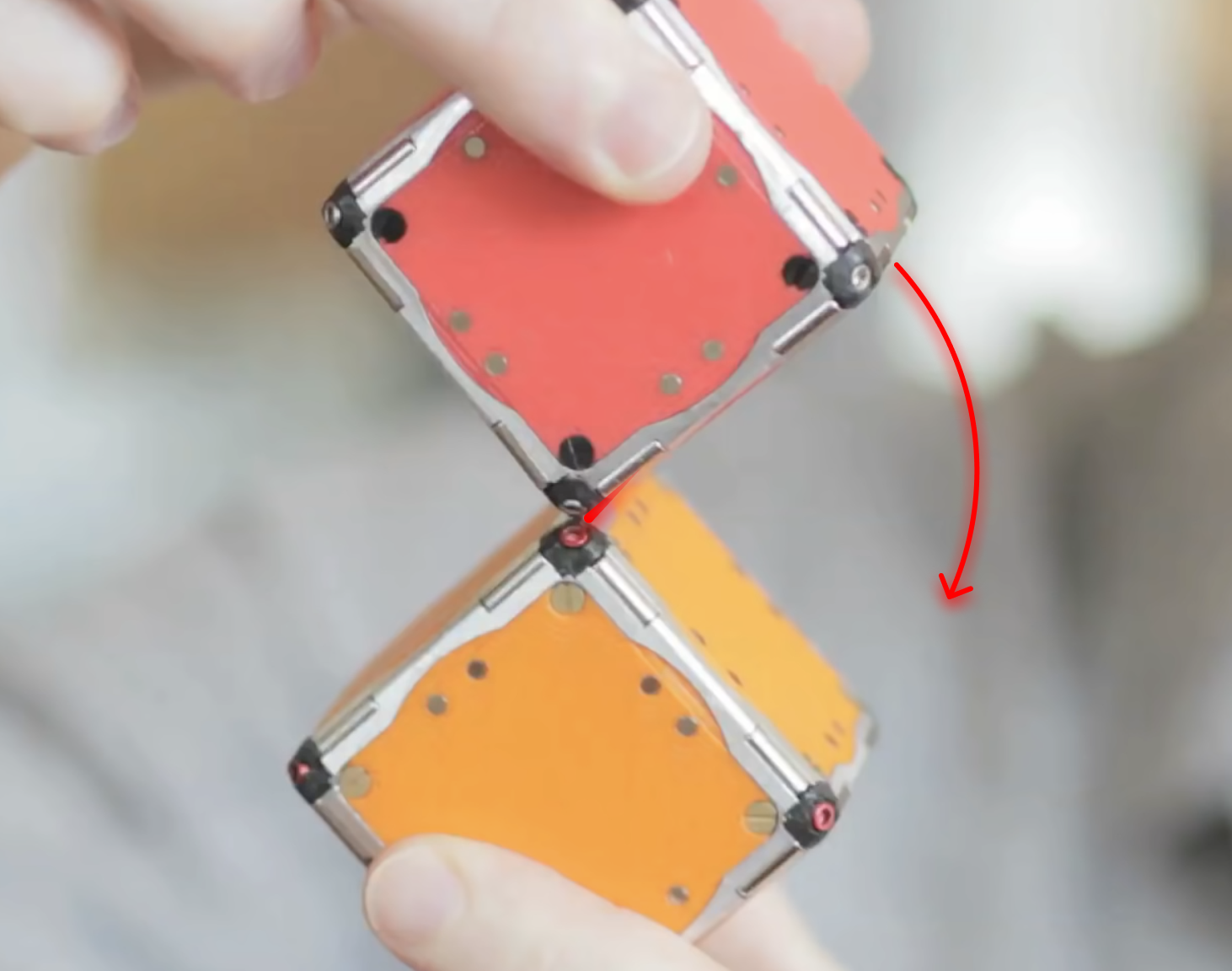
Визуально — полная противоположность M-Blocks. Модули состоят из железных сфер, внутри которых два колеса, моторчик, магнит, плата и батарейка. С помощью колес возникает вращение и движение сферы по поверхности. Похожее устройство у известного робота BB-8 производства Sphero.

Устройство сферы FreeBOT. Источник
Магнит направляет конструкцию и позволяет соединять сферы между собой. Благодаря ферромагнитному корпусу сферы сильнее прилипают друг к другу. Магнитомягкие свойства железного корпуса позволяют сферам легко разъединяться. Достаточно увести магнит в другую сторону.
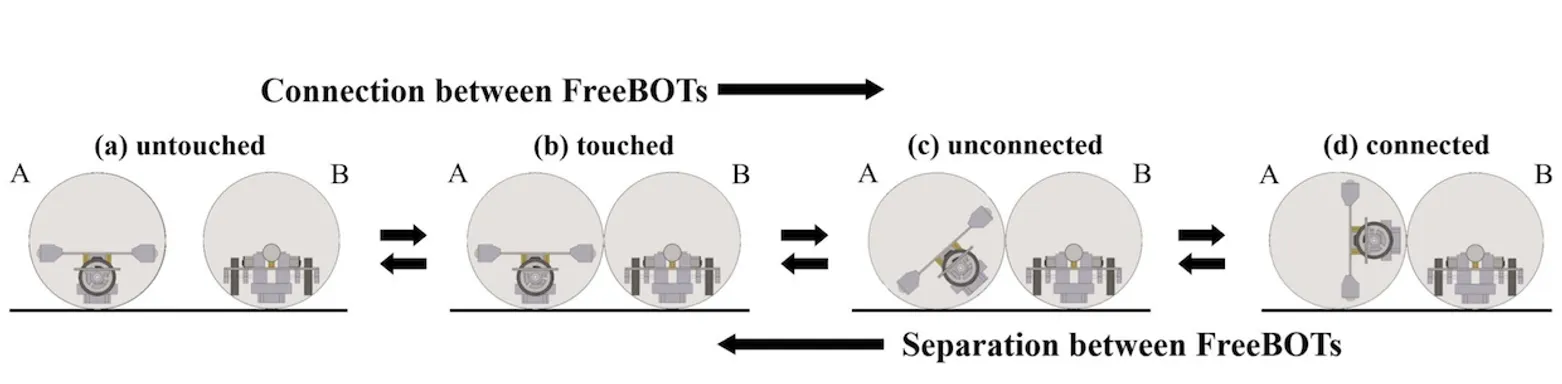
Взаимодействия сфер FreeBOT. Источник
Что стало с проектом сегодня
Модульный робот FreeBOT получил продолжение в самостоятельном проекте FreeSN. Это тот же модульный робот, но с другой концепцией: теперь есть «управляющие» и «дочерние» узлы. «Управляющие» узлы, можно сказать, занимаются перестановками «дочерних». Не нужно размещать полноценный механизм внутри каждой из сфер.
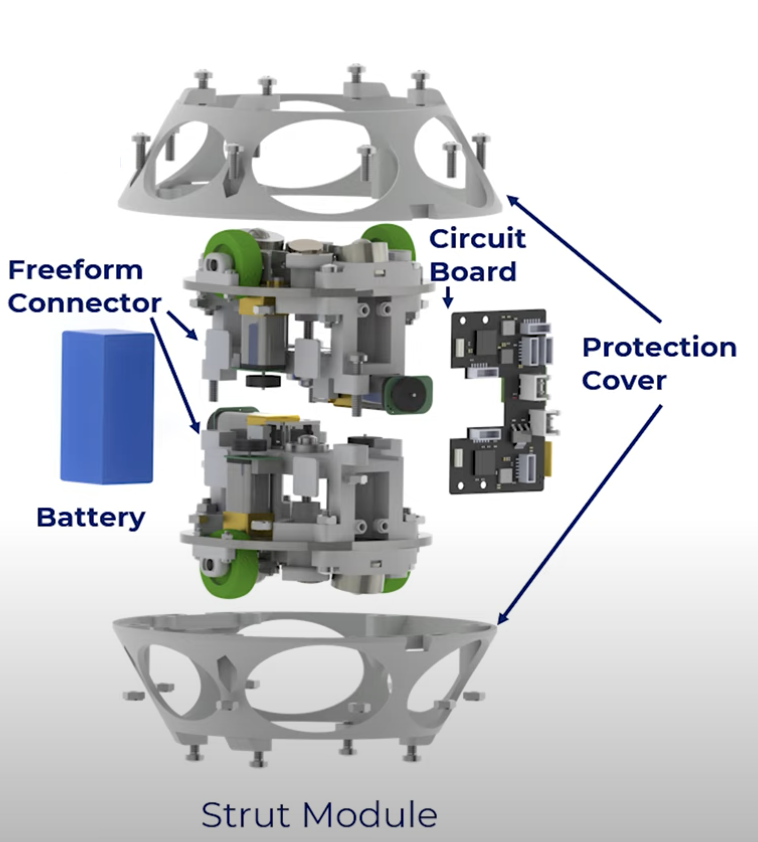
Устройство «управляющего» модуля
Сегодня FreeSN может воплощать различные структуры — мосты, треноги и др.
Также робот умеет перемещать тяжелые объекты:
Пример перемещения объекта с помощью FreeSN
Модульный робот из улиток
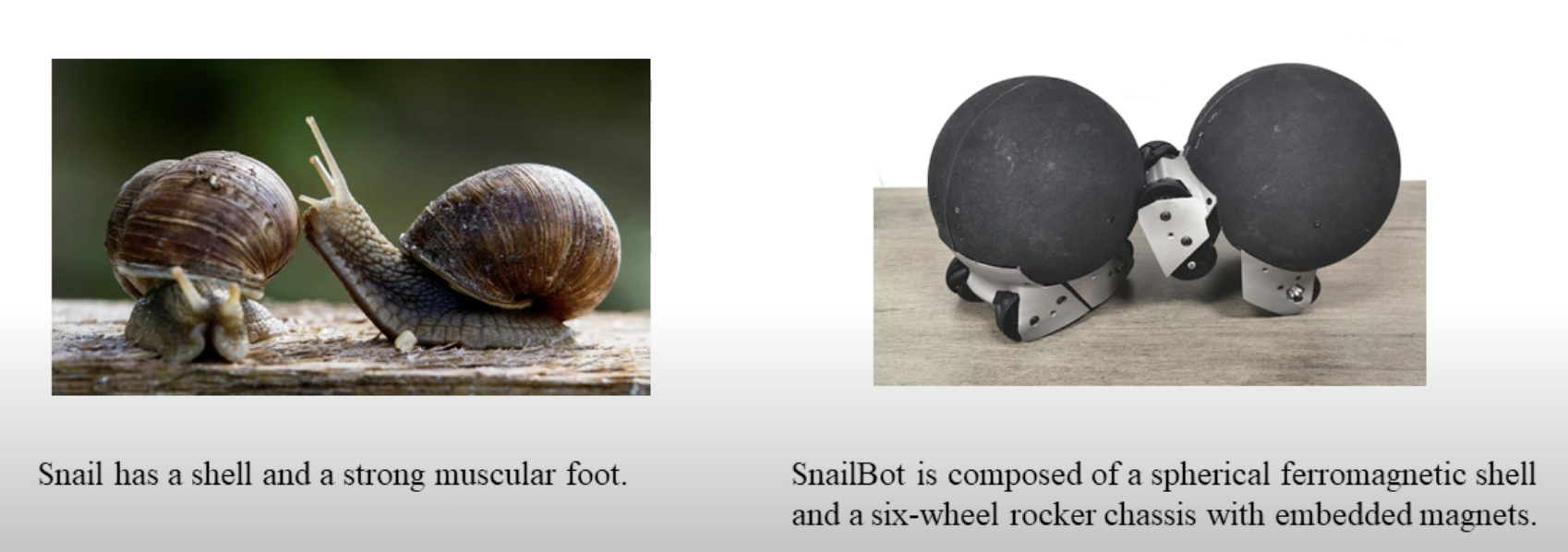
Кроме FreeSN авторы разработали новый самостоятельный проект SnailBot. Ориентиром для него стали улитки.
Источник
Идея сохранилась: модули объединяются в структуры с помощью магнитов. Но были добавлены шасси с шестью колесами в основании корпуса.

CAD-модель SnailBot. Источник
Благодаря внешней конструкции робот стал мобильней. Авторы утверждают, что такой механизм может повысить эффективность перестройки структуры и уменьшить количество сбоев при стыковке узлов.
Какой проект ученых из Гонконга станет «ключевым» — узнаем в следующих апдейтах. За успехами китайских роботостроителей можно следить на канале Robotics & AI Lab — CUHK Shenzhen.

Mori. Робот-оригами
Как говорилось ранее, модульные роботы могут создавать различные структуры. Главное их свойство — способность к реконфигурации, то есть к переустройству сборки.
Все предыдущие претенденты на звание «самого реконфигурируемого робота» были громозкими по сравнению с роботом-оригами Mori. Основа этого робота — треугольные модули. Проект был основан исследователями из Политехнической Школы Лозанны в 2016 году.
С помощью треугольных модулей можно собирать структуры плотной компоновки — как и в случае M-Blocks, зазоры минимальны.
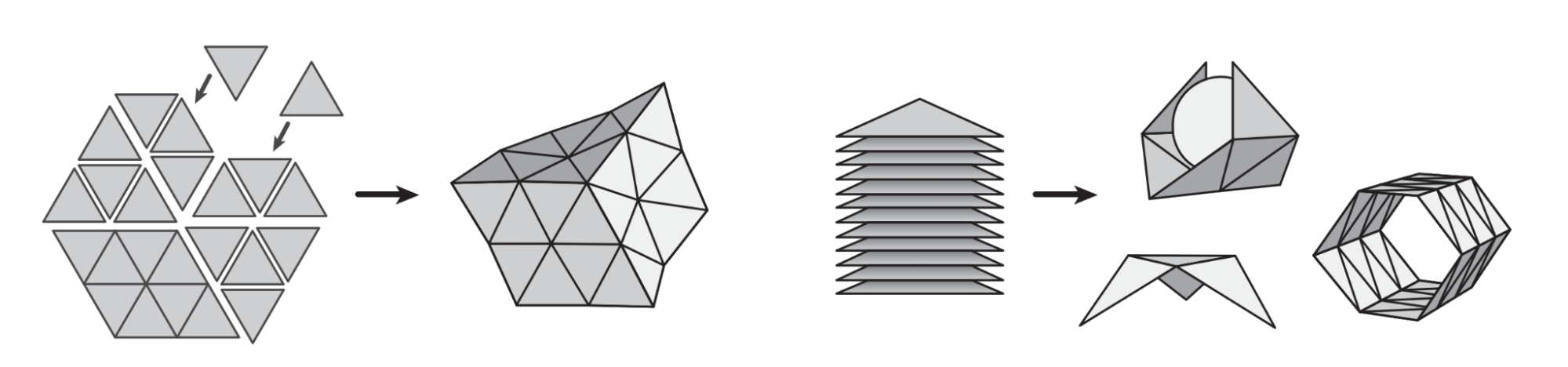
Структуры. Источник
Перспективы оригами
Благодаря структуре и толщине роботов-оригами можно создавать различные двумерные «решетки». Потенциально их можно применить в умной «броне». Свойства оригами позволяют повторять сложные геометрические формы.
Источник
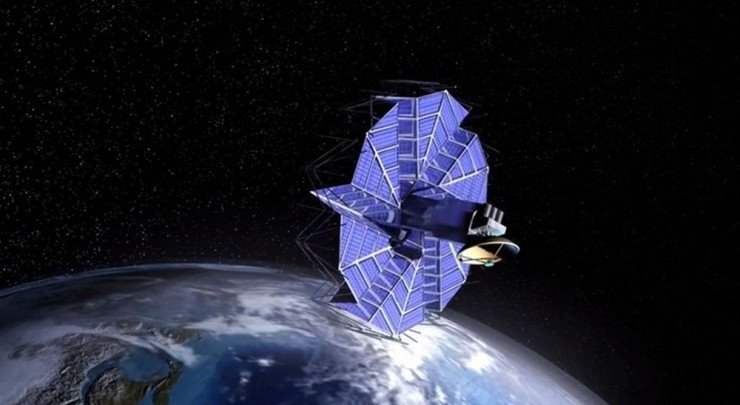
Также можно найти им применение в космонавтике. Например, в реконфигурируемых спутниковых батареях. Тогда космический мусор не сможет обесточить космический аппарат.
Устройство и его минусы
Как и в FreeSN, робот-оригами состоит из «дочерних» и «управляющих» узлов. Последние занимаются перестановками, через них происходит управление.
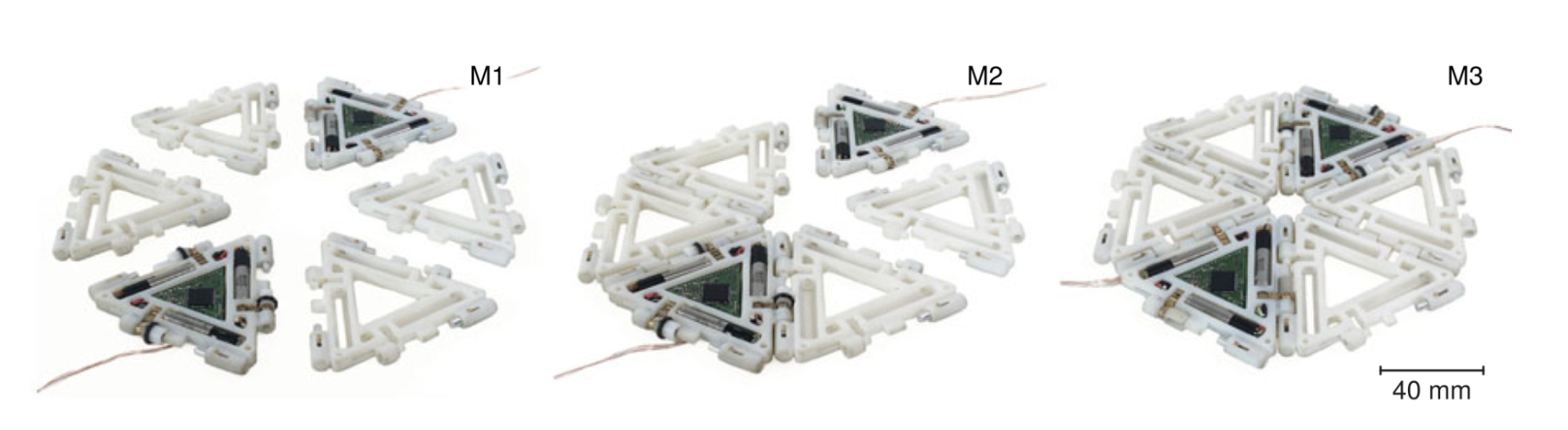
Структура оригами-робота. Источник
Длина каждого из модулей составляет 70 мм, толщина — 6 мм, а вес — 26 г. Это оптимальные параметры для реконфигураций. Напомним, что в M-Blocks система «управляющие-дочерние» невозможна из-за массы узлов.

Mori, устройство модуля. Источник
Через плату происходит управление моторчиками и шарнирами. С помощью них робот может перемещаться по поверхности. Авторы не скрывают, что для перемещения нужна ровная поверхность. Это первый минус.
Второй минус — стыковка с другими узлами неосуществима без участия человека. Это показано в видеопрезентации проекта. Также каждый из модулей управляется по отдельности. Авторы еще не реализовали межмодульную сигнализацию, когда можно управлять всей структурой через один «несущий» модуль.
Видеопрезентация проекта Mori
Третий минус — отсутствие внутреннего источника питания. К каждому из «управляющих» модулей протянуты провода для питания самой платы. Напомним, что в M-Blocks, FreeBOT, FreeSN и SnailBot используют внутренние источники питания. Но как их заряжать без разрушения структуры? Вопрос остается открытым.
Только зарегистрированные пользователи могут участвовать в опросе. Войдите, пожалуйста.
Какой проект понравился больше?
36.92% M-Blocks24
10.77% FreeBOT7
24.62% FreeSN16
3.08% SnailBOT2
21.54% Mori14
3.08% свой вариант в комментариях2
Проголосовали 65 пользователей. Воздержался 21 пользователь.
