Вернемся к томографии, которой у нас в Smart Engines уделено большое внимание. Сегодня мы расскажем про алгоритм уменьшения выраженности полос на изображении. Полосы на томографической синограмме никому бы не мешали, ведь синограммы не предъявляются врачам или другим пользователям томографов, но эти полосы приводят к появлению концентрических окружностей на восстановленных изображениях (слева на рисунке). Основным инструментом борьбы с полосами в предлагаемом алгоритме является операция ведомой фильтрации (Guided Filtering). Мы расскажем как построить ведущее изображение для синограммы, рассчитать скорректированную синограмму и использовать ее в процедуре томографической реконструкции, чтобы получить восстановленное изображение без кольцевых артефактов (справа на рисунке).

Этот текст инициирован диалогом, возникшим после нашей последней публикации по теме томографии. В комментарии был упрек, что на восстановленном изображении просматриваются кольца. Действительно, такие кольцевые искажения (кольцевые артефакты) часто возникают на томографических реконструкциях вокруг центра вращения системы «источник-объект-детектор». В этой статье мы расскажем о причинах появления таких колец и как мы с ними боремся.
В томографических установках часто есть выделенная точка, относительно которой что-то вращается: либо объект, закрепленный в держателе на гониометре, вращается, а источник и детектор неподвижны; либо вокруг выделенной точки вращается система «источник-детектор». Это два принципиально разных подхода к организации процедуры сбора томографических проекций, проблемы есть в обоих случаях. Так откуда же на восстановленном изображении возникают артефакты типа колец и как уменьшить степень их выраженности? Результат реконструкции (горизонтальное сечение пористого объекта с артефактами в виде концентрических окружностей) приведен на рис. 1.

Рис. 1 Результат реконструкции без применения процедуры подавления колец [1]
В методе рентгеновской томографии набор измеренных под разными углами проекций используется для восстановления пространственного распределения коэффициента или «эффективного» коэффициента ослабления зондирующего излучения. Томографическая проекция — это изображение, в каждом пикселе которого содержится результат измерения интенсивности излучения одной ячейкой детектора. Для наглядности будем рассматривать реконструкцию не целого объекта, а лишь одного его сечения (см. рис. 1). Для такой реконструкции нам не нужно использовать зарегистрированные проекции изображения целиком, а достаточно взять одну и ту же строчку детектора из каждой угловой проекции (см. рис. 2)
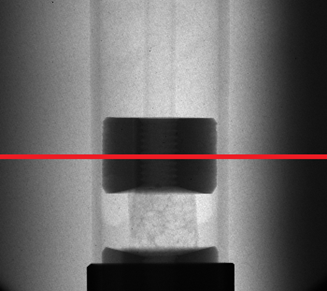
Рис. 2 Томографическая проекция. Красным цветом выделено горизонтальное сечение, участвующее в построении синограммы
Построим новое изображение — синограмму, собрав соответствующие строчки всех угловых проекций (рис. 3). i-я строка полученного изображения соответствует i-му проекционному углу. Т.е. каждый столбец содержит измерения одной и той же ячейки, соответствующие разным проекционным углам. Синограммой такое изображение называется не случайно. Легко заметить, что в центральной области оно состоит из синусоид.

Рис. 3 Участок синограммы, собранной из строчек томографических проекций
На изображении, особенно на светлых левом и правом краях, где отсутствует тень объекта, просматриваются вертикальные полосы. Наличие вертикальных полос на синограмме является причиной возникновения концентрических окружностей на восстановленном изображении. Причин появления вертикальных полос может быть несколько. Разный отклик ячеек детектора на одинаковый поступающий сигнал — одна из них. Производители детекторов стараются провести компенсацию этого эффекта в момент выпуска детектора на рынок. Компенсировать деградацию, происходящую во время жизненного цикла прибора, может периодически обновляемая, так называемая, pixel map. Ее создание — процедура затратная, поскольку требует наличия откалиброванного источника. Т.е. либо пользователь должен иметь собственный такой источник, либо вынужден обращаться в компании, предоставляющие такого рода услуги. Альтернатива — использовать алгоритмы подавления вертикальных полос. Второй возможный источник появления полос на синограмме — это сшивка участков изображения. Дело в том, что томографируемый объект не всегда умещается целиком в поле вида детектора. Человечество неумолимо движется в сторону увеличения пространственного разрешения метода томографии. Хочется томографировать большие объекты, например, человеческую голову (размер по вертикали несколько десятков сантиметров), с НАНОМЕТРОВЫМ разрешением. Легко вычислить сколько пикселей должна иметь матрица, чтобы зарегистрировать желаемую проекцию. Сейчас задачу пытаются решать, сшивая зарегистрированные участки частей объекта, снятые с перекрытием. При сшивке возникают схожие артефакты. Еще один источник полос — нестабильность самого пучка, т.е. изменение интенсивности пучка от проекции к проекции. Какова бы ни была причина появления вертикальных полос, при реконструкции они порождают кольцевые артефакты, которые обычно убирают постпроцессингом реконструированных изображений. Мы же будем бороться с кольцами фильтрацией вертикальных полосок.
Поскольку на реконструкцию поступает не результат с детектора, а отнормированное на пустой пучок и прологарифмированное изображение (рис. 4), то на вход описанному ниже алгоритму подается именно оно.

Рис. 4 Результат логарифмирования отнормированной на пустой пучок синограммы
В методе подавления вертикальных полос алгоритм Guided Filtering (рис. 5 [2]) используется как основной инструмент.
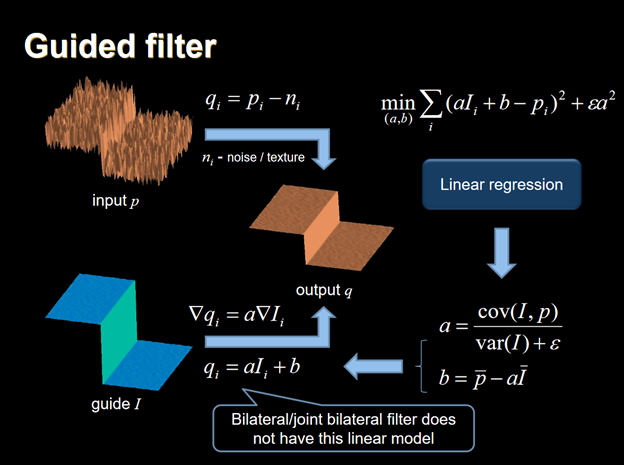

Рис. 5 Принципиальная схема фильтрации [2]
Основой Guided Filtering является наличие ведущего и ведомого изображений. Мы хотим построить ведущее изображение, на котором синусоиды будут проявлены хорошо, а выраженность вертикальных полос ослабнет. Первым шагом рассчитаем производную по горизонтальному направлению (рис. 6), т.е. по направлению, перпендикулярному направлению полос.
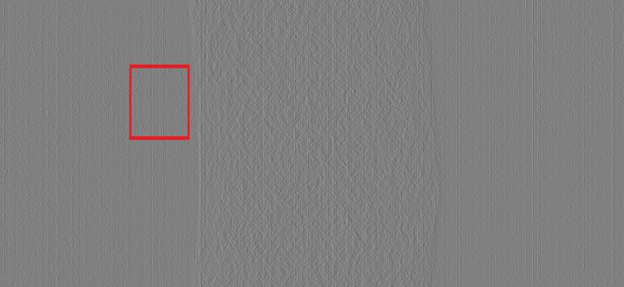
Рис. 6 Производная по горизонтальному направлению от прологарифмированной синограммы
На увеличенном участке изображения (рис. 7) шум, обусловленный нестабильностью пучка во время измерения, проявляется в виде разрывов вертикальных полос.

Рис. 7 Увеличенный участок изображения рис. 6
Для каждого столбца выполним операцию одномерной свертки, чтобы уменьшить вклад высокочастотной шумовой компоненты (рис. 8).

Рис. 8 Результат свертки
Увеличенный участок приведен на рис. 9.

Рис. 9 Увеличенный участок изображения
Однако, мы все еще на пути построения ведущего изображения. Применим построчно операцию кумулятивного суммирования к изображению, представленному на рис. 8. Результат увел нас из пространства производных, сохранив низкочастотные зависимости (рис. 10).

Рис. 10 Результат построчного применения операции кумулятивного суммирования
Вычтем полученный результат из логарифмированной синограммы, завершив процесс построения ведущего изображения (рис. 11). Нам осталось выполнить операцию фильтрации (рис. 5).

Рис. 11 Ведущее изображение
Результат выполнения операции с окном (9,1) и E=0.00001 приведен на рис. 12.

Рис. 12 Результат выполненной операции фильтрации

Рис. 13 Разница между входным изображением и результатом фильтрации
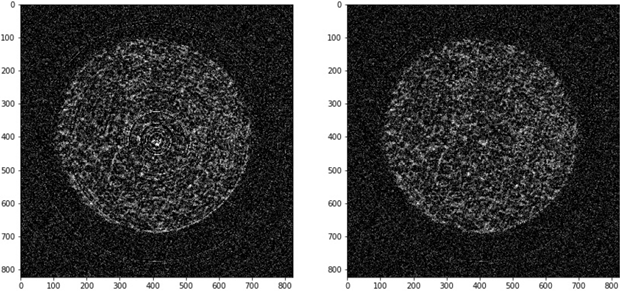
На рис. 14 приведены результаты томографической реконструкции с использованием нефильтрованных (слева) и фильтрованных (справа) проекций.

Рис. 13 Результаты томографической реконструкции
Мы описали алгоритм подавления на синограммах вертикальных полос, наличие которых приводит к появлению концентрических окружностей на восстановленных изображениях. Об этой боли знают все, кому приходится работать с томографическими изображениями. Анализ динамики выраженности окружностей на реконструированном изображении помогает выбрать оптимальные значения параметров алгоритма. В заключении мы хотим заметить, что алгоритм будет полезен всем, кто страдает от наличия на изображениях полос. Направление полос не играет решающей роли, ведь достаточно повернуть изображение и применить наш алгоритм, чтобы получить изображение с существенно пониженной степенью выраженности полос. Спасибо за внимание.
Этот текст инициирован диалогом, возникшим после нашей последней публикации по теме томографии. В комментарии был упрек, что на восстановленном изображении просматриваются кольца. Действительно, такие кольцевые искажения (кольцевые артефакты) часто возникают на томографических реконструкциях вокруг центра вращения системы «источник-объект-детектор». В этой статье мы расскажем о причинах появления таких колец и как мы с ними боремся.
В томографических установках часто есть выделенная точка, относительно которой что-то вращается: либо объект, закрепленный в держателе на гониометре, вращается, а источник и детектор неподвижны; либо вокруг выделенной точки вращается система «источник-детектор». Это два принципиально разных подхода к организации процедуры сбора томографических проекций, проблемы есть в обоих случаях. Так откуда же на восстановленном изображении возникают артефакты типа колец и как уменьшить степень их выраженности? Результат реконструкции (горизонтальное сечение пористого объекта с артефактами в виде концентрических окружностей) приведен на рис. 1.

Рис. 1 Результат реконструкции без применения процедуры подавления колец [1]
В методе рентгеновской томографии набор измеренных под разными углами проекций используется для восстановления пространственного распределения коэффициента или «эффективного» коэффициента ослабления зондирующего излучения. Томографическая проекция — это изображение, в каждом пикселе которого содержится результат измерения интенсивности излучения одной ячейкой детектора. Для наглядности будем рассматривать реконструкцию не целого объекта, а лишь одного его сечения (см. рис. 1). Для такой реконструкции нам не нужно использовать зарегистрированные проекции изображения целиком, а достаточно взять одну и ту же строчку детектора из каждой угловой проекции (см. рис. 2)

Рис. 2 Томографическая проекция. Красным цветом выделено горизонтальное сечение, участвующее в построении синограммы
Построим новое изображение — синограмму, собрав соответствующие строчки всех угловых проекций (рис. 3). i-я строка полученного изображения соответствует i-му проекционному углу. Т.е. каждый столбец содержит измерения одной и той же ячейки, соответствующие разным проекционным углам. Синограммой такое изображение называется не случайно. Легко заметить, что в центральной области оно состоит из синусоид.

Рис. 3 Участок синограммы, собранной из строчек томографических проекций
На изображении, особенно на светлых левом и правом краях, где отсутствует тень объекта, просматриваются вертикальные полосы. Наличие вертикальных полос на синограмме является причиной возникновения концентрических окружностей на восстановленном изображении. Причин появления вертикальных полос может быть несколько. Разный отклик ячеек детектора на одинаковый поступающий сигнал — одна из них. Производители детекторов стараются провести компенсацию этого эффекта в момент выпуска детектора на рынок. Компенсировать деградацию, происходящую во время жизненного цикла прибора, может периодически обновляемая, так называемая, pixel map. Ее создание — процедура затратная, поскольку требует наличия откалиброванного источника. Т.е. либо пользователь должен иметь собственный такой источник, либо вынужден обращаться в компании, предоставляющие такого рода услуги. Альтернатива — использовать алгоритмы подавления вертикальных полос. Второй возможный источник появления полос на синограмме — это сшивка участков изображения. Дело в том, что томографируемый объект не всегда умещается целиком в поле вида детектора. Человечество неумолимо движется в сторону увеличения пространственного разрешения метода томографии. Хочется томографировать большие объекты, например, человеческую голову (размер по вертикали несколько десятков сантиметров), с НАНОМЕТРОВЫМ разрешением. Легко вычислить сколько пикселей должна иметь матрица, чтобы зарегистрировать желаемую проекцию. Сейчас задачу пытаются решать, сшивая зарегистрированные участки частей объекта, снятые с перекрытием. При сшивке возникают схожие артефакты. Еще один источник полос — нестабильность самого пучка, т.е. изменение интенсивности пучка от проекции к проекции. Какова бы ни была причина появления вертикальных полос, при реконструкции они порождают кольцевые артефакты, которые обычно убирают постпроцессингом реконструированных изображений. Мы же будем бороться с кольцами фильтрацией вертикальных полосок.
Описание алгоритма и экспериентов
Поскольку на реконструкцию поступает не результат с детектора, а отнормированное на пустой пучок и прологарифмированное изображение (рис. 4), то на вход описанному ниже алгоритму подается именно оно.

Рис. 4 Результат логарифмирования отнормированной на пустой пучок синограммы
В методе подавления вертикальных полос алгоритм Guided Filtering (рис. 5 [2]) используется как основной инструмент.


Рис. 5 Принципиальная схема фильтрации [2]
Основой Guided Filtering является наличие ведущего и ведомого изображений. Мы хотим построить ведущее изображение, на котором синусоиды будут проявлены хорошо, а выраженность вертикальных полос ослабнет. Первым шагом рассчитаем производную по горизонтальному направлению (рис. 6), т.е. по направлению, перпендикулярному направлению полос.

Рис. 6 Производная по горизонтальному направлению от прологарифмированной синограммы
На увеличенном участке изображения (рис. 7) шум, обусловленный нестабильностью пучка во время измерения, проявляется в виде разрывов вертикальных полос.

Рис. 7 Увеличенный участок изображения рис. 6
Для каждого столбца выполним операцию одномерной свертки, чтобы уменьшить вклад высокочастотной шумовой компоненты (рис. 8).

Рис. 8 Результат свертки
Увеличенный участок приведен на рис. 9.

Рис. 9 Увеличенный участок изображения
Однако, мы все еще на пути построения ведущего изображения. Применим построчно операцию кумулятивного суммирования к изображению, представленному на рис. 8. Результат увел нас из пространства производных, сохранив низкочастотные зависимости (рис. 10).

Рис. 10 Результат построчного применения операции кумулятивного суммирования
Вычтем полученный результат из логарифмированной синограммы, завершив процесс построения ведущего изображения (рис. 11). Нам осталось выполнить операцию фильтрации (рис. 5).

Рис. 11 Ведущее изображение
Результат выполнения операции с окном (9,1) и E=0.00001 приведен на рис. 12.

Рис. 12 Результат выполненной операции фильтрации

Рис. 13 Разница между входным изображением и результатом фильтрации
На рис. 14 приведены результаты томографической реконструкции с использованием нефильтрованных (слева) и фильтрованных (справа) проекций.

Рис. 13 Результаты томографической реконструкции
Заключение
Мы описали алгоритм подавления на синограммах вертикальных полос, наличие которых приводит к появлению концентрических окружностей на восстановленных изображениях. Об этой боли знают все, кому приходится работать с томографическими изображениями. Анализ динамики выраженности окружностей на реконструированном изображении помогает выбрать оптимальные значения параметров алгоритма. В заключении мы хотим заметить, что алгоритм будет полезен всем, кто страдает от наличия на изображениях полос. Направление полос не играет решающей роли, ведь достаточно повернуть изображение и применить наш алгоритм, чтобы получить изображение с существенно пониженной степенью выраженности полос. Спасибо за внимание.
Список используемых источников
1. Е.Е. Берловская, А.В. Бузмаков, А.С. Ингачева и др. Алгоритм подавления ортотропных артефактов регистрации изображений в рентгеновском и терагерцовом диапазонах. // Информационные процессы. 2019, т.19, ном. 2, стр. 1-9.
2. kaiminghe.com/eccv10/eccv10ppt.pdf
2. kaiminghe.com/eccv10/eccv10ppt.pdf
