Часть 1. От практики к теории.
Как и все поколения будущих инженеров, в ВУЗе я делал лабораторные и курсовые, что-то рассчитывал, чертил годографы и казалось, что понимал теорию и был готов применять ее на практике. По окончанию университета, попав инженером АСУТП на нефтеперерабатывающий завод, увидев реальную установку, контроллеры, датчики, клапаны, я был в некотором недоумении: как связать теорию САР с поддержанием в колонне уровня скворчащей горячей жидкости при посредстве дрожащего буйкового уровнемера и гудящего замазученного клапана. Да и описание регулятора в документации на ПЛК сильно отличалось от схемы в лекциях по САУ. Со временем, поняв опытным путем и процессы в колоннах и аппаратах, и подходы к практическому построению контуров регулирования, освежив в памяти теорию удалось более осознано связать теорию САР с реальным процессом. Но каждое следующее поколение инженеров, попадая после ВУЗа на реальное производство, задавалось теми же вопросами.
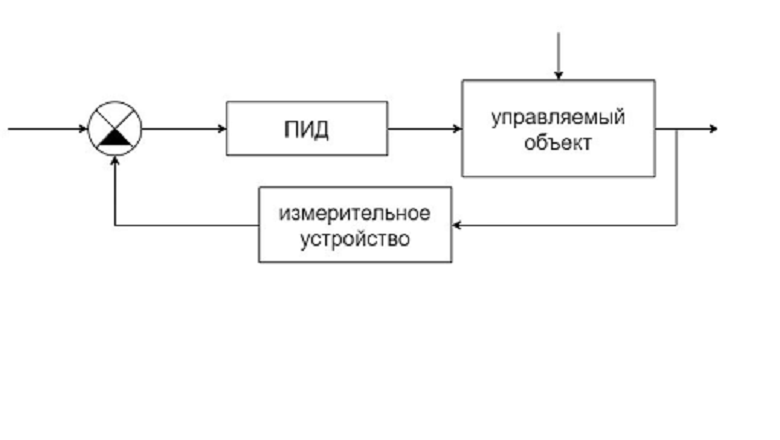
Почитав еще раз лекции и пересмотрев множество материалов по «практической реализации ПИД-регуляторов», я не нашел грамотного и доступного для понимания описания как самого ПИД-регулятора, так и процесса регулирования. Поэтому решил написать свою статью «про велосипед автоматизации».