
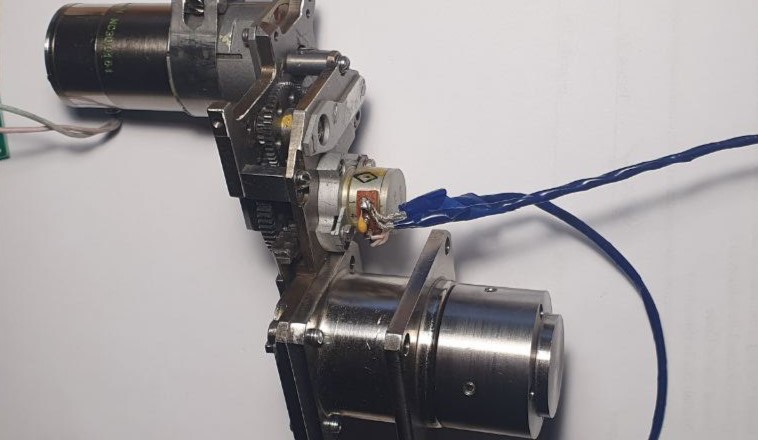
Статья про разработку системы управления робототехнического устройства на примере привода рулевой поверхности малогабаритной ракеты.
Статья про разработку системы управления робототехнического устройства на примере привода рулевой поверхности малогабаритной ракеты.
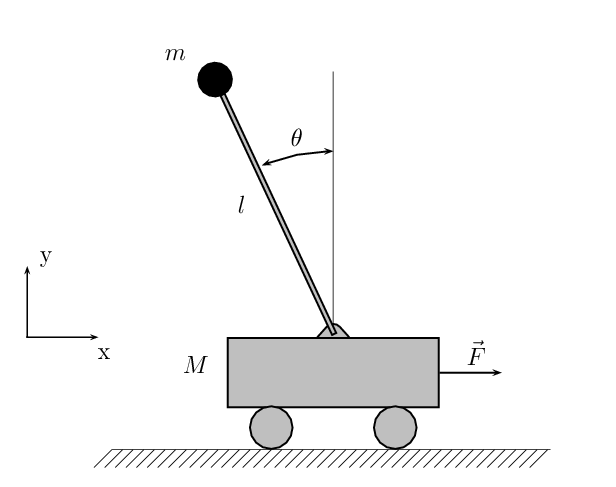
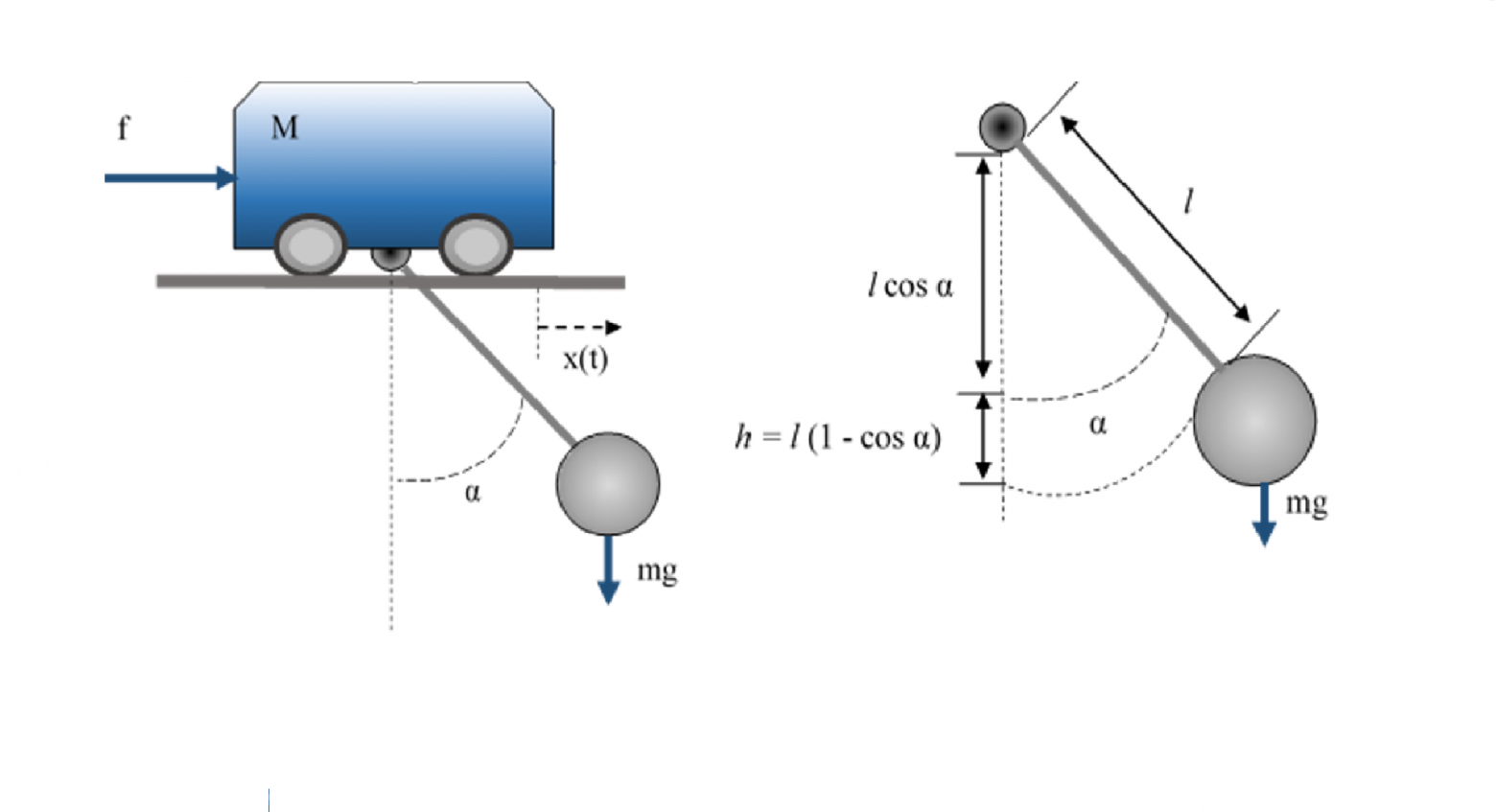
Классическим примером демонстрации возможностей теории управления является модель обратного маятника на тележке. В данной статье продемонстрируем решение классических проблем классическими методами, но в максимально тепличных условиях, когда всю рутинную работу за нас будут выполнять алгоритмы пакета MATLAB.
Леонид Маркович Скворцов. Широко известный в узких кругах математик, профессионально занимающийся математическими проблемами автоматического управления. Например, его авторские методы использованы в SimInTech. Данный текст, еще готовится к публикации. Но с разрешения автора, читатели Хабр будут первыми кто сможет оценить. Первая часть здесь... Вторая часть здесь...
Две предыдущие части были заполнены многоэтажными формулами в третей части разберем на примерах применение этих формул. Математику в жизнь!
Приведем примеры и покажем в видео как синтезировать регулятор для линейной модели двухроторного газотурбинного двигателя, работающего на базовом режиме малого газа, вместе с исполнительным механизмом. От теории к практике не приходя в сознание!

Когда-то давно меня попросили разработать модель динамики полета АСП (авиационного средства поражения) в отечественном ПО, в среде SimInTech, причем разработать не с нуля, а тупо повторив уже созданную ранее модель в Матлабе (с Симулинком), и любезно выложенную в публичный доступ на гитхабе.
Я подумал - почему бы и нет, ведь в Симинтеке есть практически все требуемые блоки, а каких нет, я доработаю по образу и подобию. Без погружения в детали, в конце концов так оно и вышло. Но мне справедливо возразили - а чем докажешь, что твоя модель считает в точности так же, в динамике, как и исходная матлабовская модель?
Продолжаем публикацию лекций Олега Степановича Козлова с кафедры Ядерные Энергетические Установки МГТУ им. Баумана. Вторая часть лекции про качество САР и модель реактора как бонус.
В предыдущих сериях:
1. Введение в теорию автоматического управления.2. Математическое описание систем автоматического управления 2.1 — 2.3, 2.3 — 2.8, 2.9 — 2.13.
3. Частотные характеристики звеньев и систем автоматического управления регулирования. 3.1. Амплитудно-фазовая частотная характеристика: годограф, АФЧХ, ЛАХ, ФЧХ. 3.2. Типовые звенья систем автоматического управления регулирования. Классификация типовых звеньев. Простейшие типовые звенья. 3.3. Апериодическое звено 1–го порядка инерционное звено. На примере входной камеры ядерного реактора. 3.4. Апериодическое звено 2-го порядка. 3.5. Колебательное звено. 3.6. Инерционно-дифференцирующее звено. 3.7. Форсирующее звено. 3.8. Инерционно-интегрирующее звено (интегрирующее звено с замедлением). 3.9. Изодромное звено (изодром). 3.10 Минимально-фазовые и не минимально-фазовые звенья. 3.11 Математическая модель кинетики нейтронов в «точечном» реакторе «нулевой» мощности.
4. Структурные преобразования систем автоматического регулирования.
5. Передаточные функции и уравнения динамики замкнутых систем автоматического регулирования (САР).
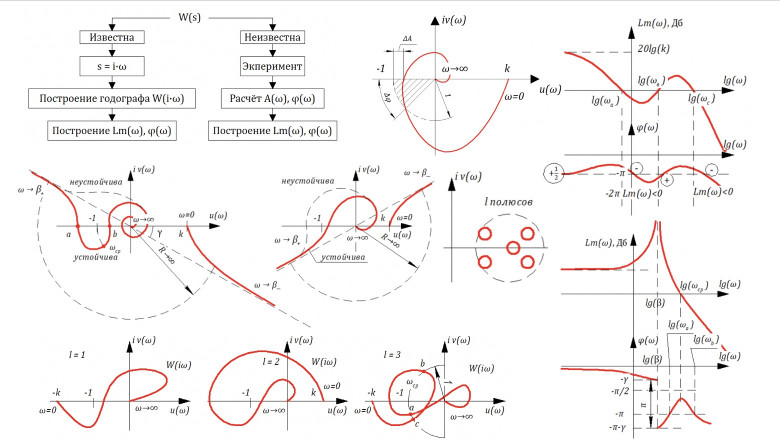
6. Устойчивость систем автоматического регулирования. 6.1 Понятие об устойчивости САР. Теорема Ляпунова. 6.2 Необходимые условия устойчивости линейных и линеаризованных САР. 6.3 Алгебраический критерий устойчивости Гурвица. 6.4 Частотный критерий устойчивости Михайлова. 6.5 Критерий Найквиста.
7. Точность систем автоматического управления. Часть 1 и Часть 2
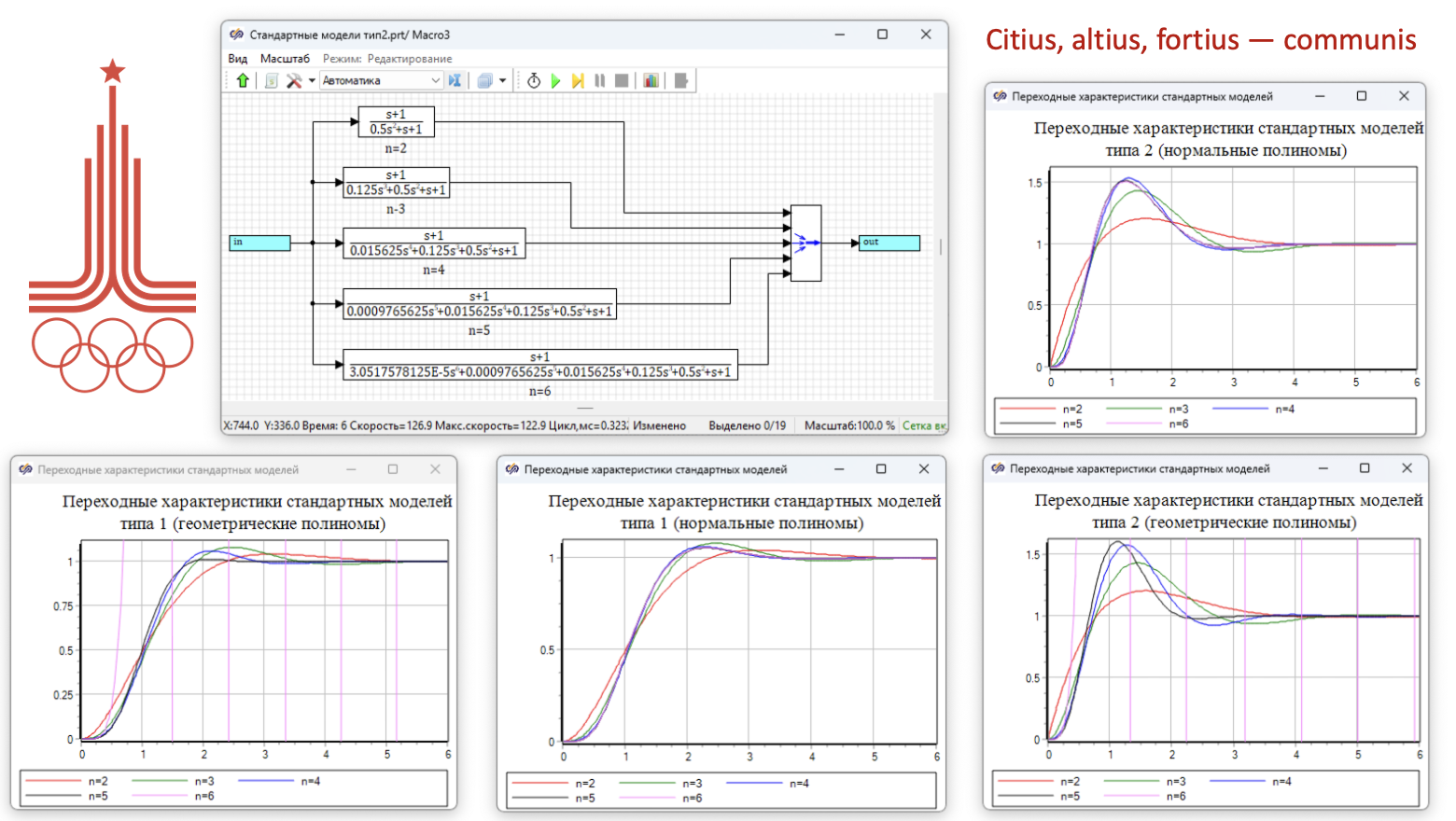
Ленонид Маркович Скворцов. Широко известный в узких кругах математик, профессионально занимающийся математическами проблемами автоматического управления. Например, его авторские методы использованы в SimInTech. Данный текст первая часть работы, которая еще готовится к публикации. Но с разрешения автора, читатели Хабр будут превыми кто сможет с ним ознакомится.
Все мы слышали, про преимущества советской математической школы над зарубежными математическими школами, но мало кто видел это приимущество в реальных задачах. В случае математических методов Леонида Марковича Скворцова, математика это не просто абстрактные формулы, а решение реальных прикладных задач, все можно увидеть пощупать и попробовать. В конце статьи видео-доказательство, практичесокй реализации преимуществ методов Леонида Марковича на практике.

В предыдущих сериях:
1. Введение в теорию автоматического управления.2. Математическое описание систем автоматического управления 2.1 — 2.3, 2.3 — 2.8, 2.9 — 2.13.
3. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ЗВЕНЬЕВ И СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕГУЛИРОВАНИЯ. 3.1. Амплитудно-фазовая частотная характеристика: годограф, АФЧХ, ЛАХ, ФЧХ. 3.2. Типовые звенья систем автоматического управления регулирования. Классификация типовых звеньев. Простейшие типовые звенья. 3.3. Апериодическое звено 1–го порядка инерционное звено. На примере входной камеры ядерного реактора. 3.4. Апериодическое звено 2-го порядка. 3.5. Колебательное звено. 3.6. Инерционно-дифференцирующее звено. 3.7. Форсирующее звено. 3.8. Инерционно-интегрирующее звено (интегрирующее звено с замедлением). 3.9. Изодромное звено (изодром). 3.10 Минимально-фазовые и не минимально-фазовые звенья. 3.11 Математическая модель кинетики нейтронов в «точечном» реакторе «нулевой» мощности.
4. Структурные преобразования систем автоматического регулирования.
5. Передаточные функции и уравнения динамики замкнутых систем автоматического регулирования (САР).
6. Устойчивость систем автоматического регулирования. 6.1 Понятие об устойчивости САР. Теорема Ляпунова. 6.2 Необходимые условия устойчивости линейных и линеаризованных САР. 6.3 Алгебраический критерий устойчивости Гурвица. 6.4 Частотный критерий устойчивости Михайлова. 6.5 Критерий Найквиста.
7. Точность систем автоматического управления. Часть 1 и Часть 2

Все знают, что Россия — энергетическая сверхдержава, она же – «разорванная в клочья Обамой бензоколонка». Но не все знают, как это может отражаться в области развития математического моделирования. Расскажу одну жизненную историю.
Начну с далекого 2007 года. Довелось мне в те времена поработать на крупном заводе, который «эффективные менеджеры» как раз делили на несколько отдельных предприятий, каждое из которых крутилось, как могло. В том цеху, который и стал одним из таких предприятий, на токарных станках могла крутиться (и крутилась!) металлическая болванка размером с автобус. А в печку для нагрева металла можно было затолкать паровоз. Целиком. Когда я в первый раз увидел токарный станок, на котором крутится и обтачивается деталь размером с автобус, моему восторгу не было предела. Гордость за страну переполняла до состояния «в зобу дыханье сперло». А потом старожилы показали ту часть цеха, где стояли фундаменты таких же станков и пояснили:
- А вот тут были станки для точной обработки. Их продали китайцам по цене металлолома.
- А почему вот другие не продали?
- Потому, что у них точность обработки такая, что их только в металлолом можно сдать. Поэтому они здесь работают и крутятся как могут, и обтачивают валы турбин Siemiens.
Схема бизнеса был гениальна: Siemiens привозил на завод многотонные болванки, их неделями и месяцами обтачивали до состояния заготовок и увозили для чистовой обработки в Германию. Где уже выполняли чистовую доводку на точных и дорогих станках. Главные затраты при черновой обработке – это износ станков и инструмента, зарплата токаря и электроэнергия, необходимая для вращения тонн металла. Поскольку электроэнергия в РФ дешевле немецкой, недели обработки болванок с лихвой окупают транспортировку, а низкая точность обработки не требует дорогого обслуживания и мало чувствительна к износу еще советского оборудования. В итоге весь бизнес заключался в «перепродаже» дешевой электроэнергии из РФ в Германию, но в виде металлических обточенных болванок.
Возникла задача запускать графические приложения в полностью изолированной среде: как от Интернета, так и от файловой системы «хозяйской» ОС. В моём случае это был Matlab. Пишут, что в последних версиях он стал шибко «умным»: сам без спроса постоянно лезет в сеть и чем-то там постоянно обменивается со своими серверами. Однако использовать для поставленной задачи виртуальную гостевую машину / аппаратную виртуализацию (наподобие VirtualBox) — это, ИМХО, «too much». Docker подошел бы гораздо лучше, т.к. он использует то же ядро ОС и не требует эмуляции / виртуализации ввода-вывода, что существенно экономит ресурсы. Однако Docker «из коробки» не предназначен для запуска GUI-приложений. Что ж, попробуем это исправить и запустить таки Matlab внутри Docker-контейнера с полной поддержкой «иксов» и GUI.

В данной статье речь пойдет о создании счетчика расхода энергии батарейки.
Раньше я уже писал, что сталкивался с подобной задачей и тогда её удалось решить малой кровью. На "рынке" была микросхема кулоновского счетчика, которая подходила под потребление разрабатываемого устройства.
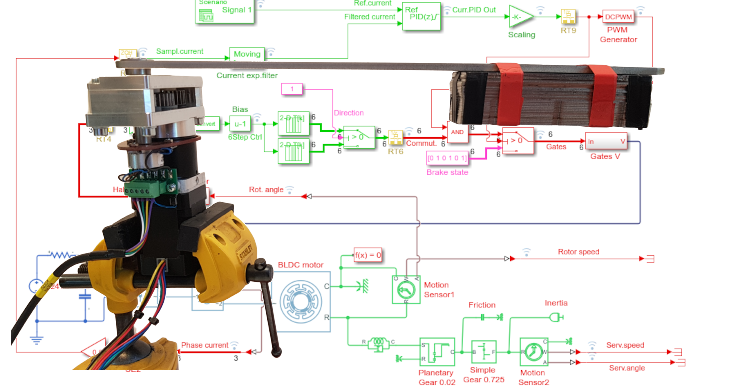
Здесь разрабатываем эталонную таблицу коммутации BLDC мотора на основе цифрового двойника и создаем алгоритм для автоматической генерации таблицы в сервоконтроллере MC50. Таблица коммутации используется для 6-шагового управления вращением ротора BLDC мотора с датчиками Холла. Хотя найти правильный способ коммутации несложно путём перебора (6! => 720 вариантов), но такой путь опасен неправильным выбором последовательности коммутаций, которые могут создать вращение, но крайне неэффективное и нестабильное.
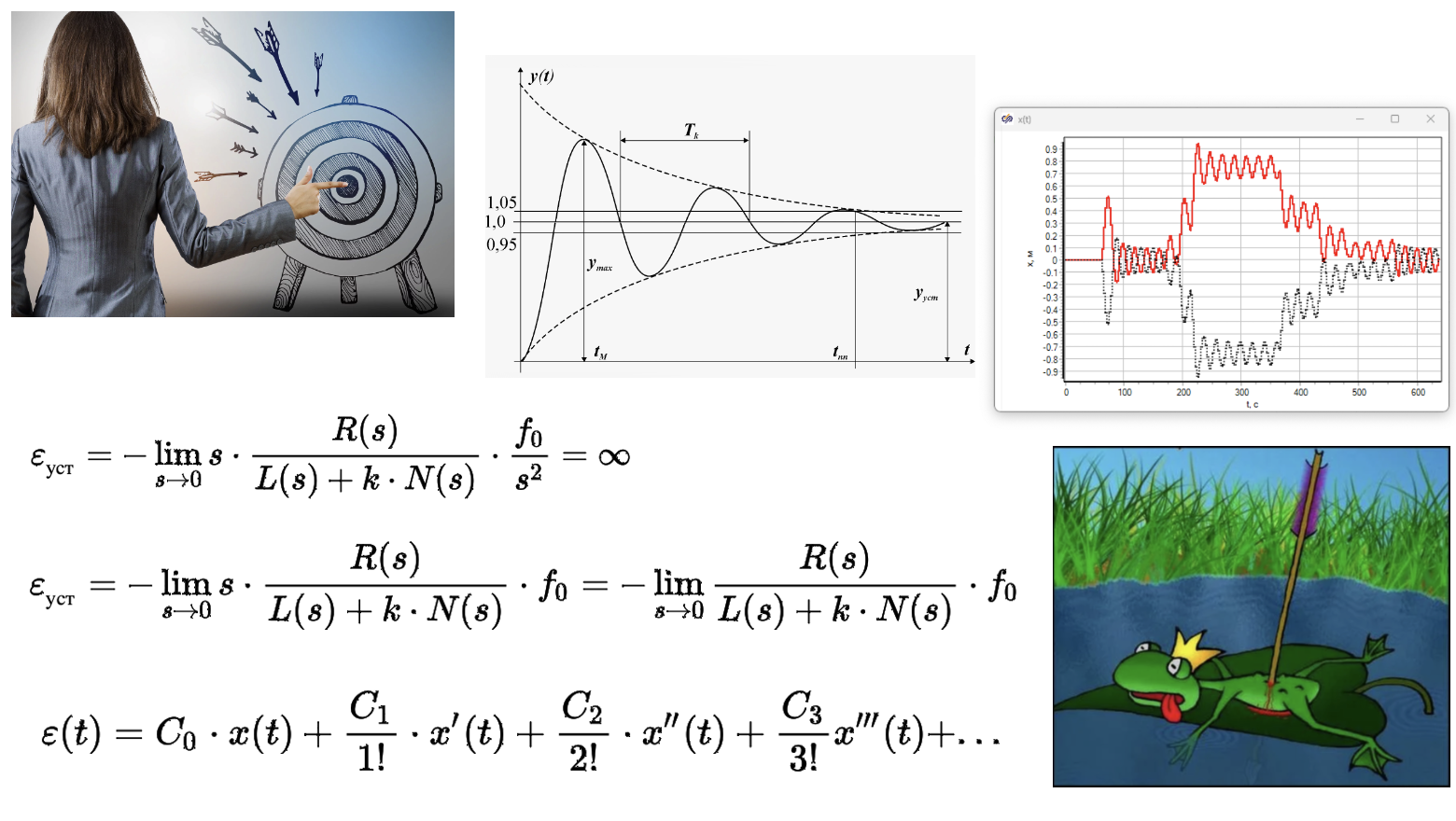
Продолжаем публикацию лекций Олега Степановича Козлова по предмету "Управление в Технических Системах".
В этой лекции мы продолжим разбираться с точностью, но сначала краткое содержание предыдущих серий:
1. Введение в теорию автоматического управления.2. Математическое описание систем автоматического управления 2.1 — 2.3, 2.3 — 2.8, 2.9 — 2.13.
3. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ЗВЕНЬЕВ И СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕГУЛИРОВАНИЯ. 3.1. Амплитудно-фазовая частотная характеристика: годограф, АФЧХ, ЛАХ, ФЧХ. 3.2. Типовые звенья систем автоматического управления регулирования. Классификация типовых звеньев. Простейшие типовые звенья. 3.3. Апериодическое звено 1–го порядка инерционное звено. На примере входной камеры ядерного реактора. 3.4. Апериодическое звено 2-го порядка. 3.5. Колебательное звено. 3.6. Инерционно-дифференцирующее звено. 3.7. Форсирующее звено. 3.8. Инерционно-интегрирующее звено (интегрирующее звено с замедлением). 3.9. Изодромное звено (изодром). 3.10 Минимально-фазовые и не минимально-фазовые звенья. 3.11 Математическая модель кинетики нейтронов в «точечном» реакторе «нулевой» мощности.
4. Структурные преобразования систем автоматического регулирования.
5. Передаточные функции и уравнения динамики замкнутых систем автоматического регулирования (САР).
6. Устойчивость систем автоматического регулирования. 6.1 Понятие об устойчивости САР. Теорема Ляпунова. 6.2 Необходимые условия устойчивости линейных и линеаризованных САР. 6.3 Алгебраический критерий устойчивости Гурвица. 6.4 Частотный критерий устойчивости Михайлова. 6.5 Критерий Найквиста.

Продолжаем публиковать лекции Олега Степановича Козлова по предмету управление в технических системах. В этой лекции займемся точностью. Предыдушие части:
1. Введение в теорию автоматического управления.2. Математическое описание систем автоматического управления 2.1 — 2.3, 2.3 — 2.8, 2.9 — 2.13.
3. Частотные характеристики звеньев и систем автоматического управления регулирования. 3.1. Амплитудно-фазовая частотная характеристика: годограф, АФЧХ, ЛАХ, ФЧХ. 3.2. Типовые звенья систем автоматического управления регулирования. Классификация типовых звеньев. Простейшие типовые звенья. 3.3. Апериодическое звено 1–го порядка инерционное звено. На примере входной камеры ядерного реактора. 3.4. Апериодическое звено 2-го порядка. 3.5. Колебательное звено. 3.6. Инерционно-дифференцирующее звено. 3.7. Форсирующее звено. 3.8. Инерционно-интегрирующее звено (интегрирующее звено с замедлением). 3.9. Изодромное звено (изодром). 3.10 Минимально-фазовые и не минимально-фазовые звенья. 3.11 Математическая модель кинетики нейтронов в «точечном» реакторе «нулевой» мощности.
4. Структурные преобразования систем автоматического регулирования.
5. Передаточные функции и уравнения динамики замкнутых систем автоматического регулирования (САР).
6. Устойчивость систем автоматического регулирования. 6.1 Понятие об устойчивости САР. Теорема Ляпунова. 6.2 Необходимые условия устойчивости линейных и линеаризованных САР. 6.3 Алгебраический критерий устойчивости Гурвица. 6.4 Частотный критерий устойчивости Михайлова. 6.5 Критерий Найквиста.







Продолжаем открытый проект сервоконтроллера MC50.
В предыдущей статье была разработана архитектура управления и написана программа сервопривода. Но регулятор был вручную настроен на определенный тип нагрузки. А что делать если тип и динамика нагрузки неизвестны?
Анимированные графики помогают представить информацию более красиво и наглядно. Matlab позволяет их создавать с помощью всего пары функций. Как это сделать, читайте в данной статье.

Предсказательное обслуживание – быстроразвивающийся подход к организации технического обслуживания и ремонта. Стремительное развитие и внедрение предсказательного обслуживания основано на современных достижениях цифровизации и четвертой промышленной революции. В основе технологии лежит использование возможностей Анализа Больших данных, Искусственного интеллекта, Интернета вещей, Облачных сервисов.
Одним из наших проектов по теме предсказательного обслуживания является разработка системы диагностики трансформатора на основе цифрового двойника. Мы хотим поделиться частью этого проекта – этапом создания цифрового двойника и обучения моделей машинного обучения для решения задачи раннего обнаружения межвитковых замыканий и отклонений параметров трансформатора от номинальных.
Продолжаем лекции по управлению в технических устройствах (УТС). Данные лекции читаются в МГУТ им. Баумана. Автор лекций к.т.н. Козлов Олег Степанович, кафедра Ядерные Энергетические Установки, факультета машиностроения. За что ему огромное спасибо!
1. Введение в теорию автоматического управления.2. Математическое описание систем автоматического управления 2.1 — 2.3, 2.3 — 2.8, 2.9 — 2.13.
3. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ЗВЕНЬЕВ И СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕГУЛИРОВАНИЯ. 3.1. Амплитудно-фазовая частотная характеристика: годограф, АФЧХ, ЛАХ, ФЧХ. 3.2. Типовые звенья систем автоматического управления регулирования. Классификация типовых звеньев. Простейшие типовые звенья. 3.3. Апериодическое звено 1–го порядка инерционное звено. На примере входной камеры ядерного реактора. 3.4. Апериодическое звено 2-го порядка. 3.5. Колебательное звено. 3.6. Инерционно-дифференцирующее звено. 3.7. Форсирующее звено. 3.8. Инерционно-интегрирующее звено (интегрирующее звено с замедлением). 3.9. Изодромное звено (изодром). 3.10 Минимально-фазовые и не минимально-фазовые звенья. 3.11 Математическая модель кинетики нейтронов в «точечном» реакторе «нулевой» мощности.
4. Структурные преобразования систем автоматического регулирования.
5. Передаточные функции и уравнения динамики замкнутых систем автоматического регулирования (САР).
В сфере грузоподъемной техники система противораскачивания довольно популярная и полезная штука. Эта система полезна тем, что, к примеру, оператор крана не обязан корректировать движение крана самостоятельно, чтобы не происходило раскачивание груза и не было рисков возникновения аварийных ситуаций. Многие производители предлагают свои системы на базе ПЛК (программируемых промышленных контроллеров) либо на базе ПЧ (преобразователей частоты). Мы в нашем инженерном центре тоже решили не стоять в стороне и делать свою систему. Погружение в теорию привело нас к пространству состояний. Таким образом целью статьи является рассказать, как возможно решить задачу противораскачивания груза в пространстве состояний.

Привет, хабр! Уже более 5 лет занимаюсь разработкой и моделированием радиолокационных систем, в частности «больших» локаторов дециметровой длины. В своей практике сталкивался с тем, что при разработке такой сложной системы, как локационная, в основном делают упор на моделировании функциональной части, например, блоков фильтрации, типа зондирующего сигнала, алгоритмов компенсации задержек, а иногда и учет нелинейных эффектов, в частности в аналоговом усилительном тракте.
Как‑то раз, разрабатывая модель функциональных блоков и ячеек локатора в матлабе и симулинке (для моих нужд и целей этого аппарата хватало вполне), задумался о том, что живой локатор так не работает, он состоит из множества дополнительных систем, которые в совокупности и формируют его истинный облик. Проведя небольшие исследования, а также на личном опыте столкнулся с тем, что мало кто из разрабов моделит САУ, а уж совместно с функциональной частью и подавно. Еще меньше моделят учет и потери пакетов при сетевом трафике, а это частая проблема у «больших» локаторов со множеством приемо‑передающих ячеек и блоков.
В связи с этим появилась идея поделиться с читателями Хабра простыми (хелповыми), но полезными моделями, которые подтолкнут или способствуют к решению этих проблем. Также хочу поделиться небольшим опытом в моделировании аналоговой части, так как ее в реале еще никто не отменял.
Итак, поехали..
Продолжаем лекции по управлению в технических системах предыдущие части:
1. Введение в теорию автоматического управления.2. Математическое описание систем автоматического управления 2.1 — 2.3, 2.3 — 2.8, 2.9 — 2.13.
3. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ЗВЕНЬЕВ И СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕГУЛИРОВАНИЯ. 3.1. Амплитудно-фазовая частотная характеристика: годограф, АФЧХ, ЛАХ, ФЧХ. 3.2. Типовые звенья систем автоматического управления регулирования. Классификация типовых звеньев. Простейшие типовые звенья. 3.3. Апериодическое звено 1–го порядка инерционное звено. На примере входной камеры ядерного реактора. 3.4. Апериодическое звено 2-го порядка. 3.5. Колебательное звено. 3.6. Инерционно-дифференцирующее звено. 3.7. Форсирующее звено. 3.8. Инерционно-интегрирующее звено (интегрирующее звено с замедлением). 3.9. Изодромное звено (изодром). 3.10 Минимально-фазовые и не минимально-фазовые звенья. 3.11 Математическая модель кинетики нейтронов в «точечном» реакторе «нулевой» мощности.
4. Структурные преобразования систем автоматического регулирования.
5. Передаточные функции и уравнения динамики замкнутых систем автоматического регулирования (САР).
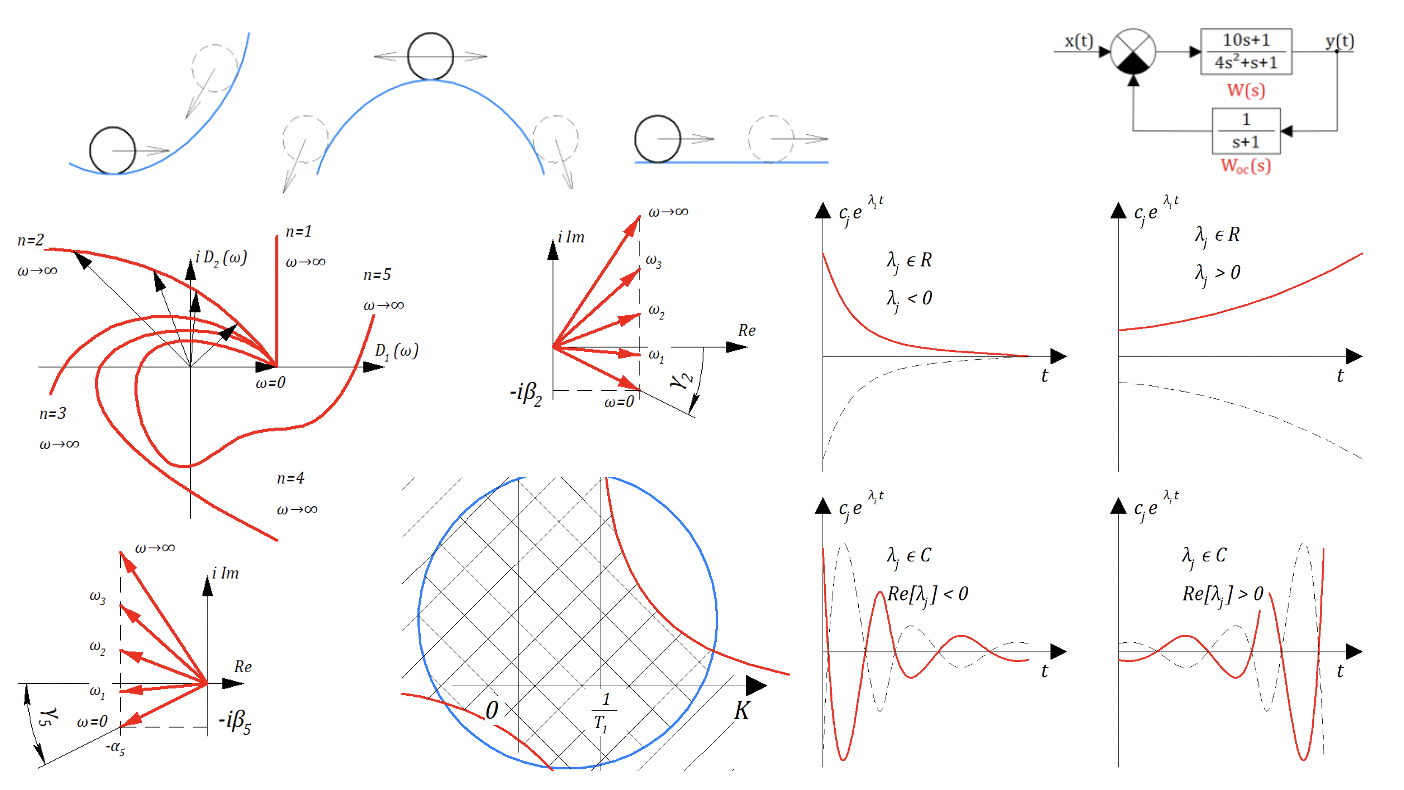
Теперь перейдем к устойчивости!