Команда из Лаборатории компьютерных наук и искусственного интеллекта Массачусетского технологического института разработала способ, позволяющий автономным транспортным средствам «видеть» дорогу при плохих погодных условиях. Они применили технологию картирования того, что находится под дорогой, с использованием наземного проникающего радара (GPR).
В настоящее время большинство автономных транспортных средств используют датчики и лидары, чтобы определить свое положение на дороге. Однако камеры могут не увидеть знаки и разметку из-за условий освещения или снега, а лидары часто становятся менее точным в ненастную погоду.
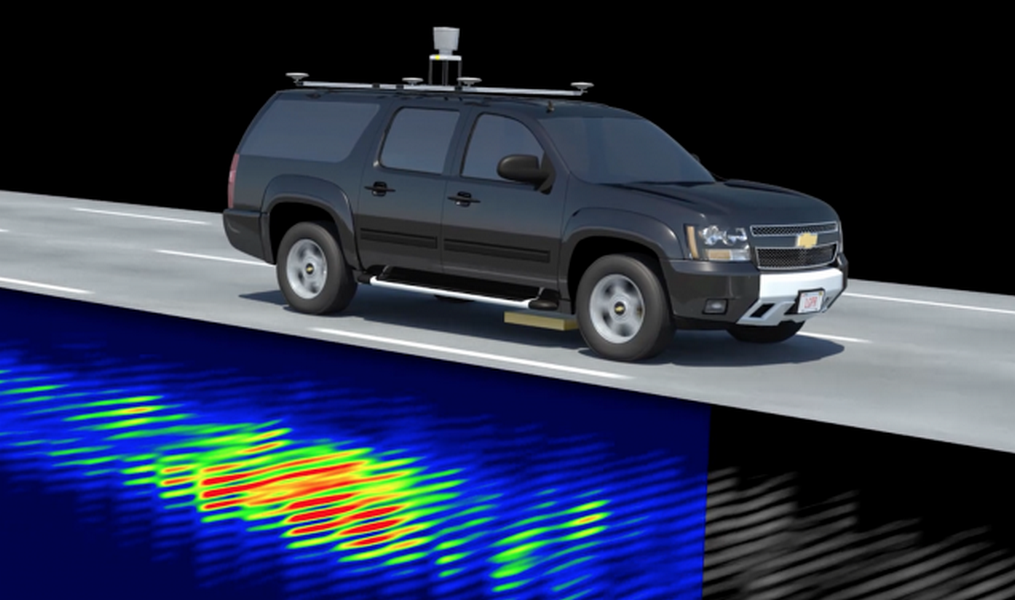
LGPR же посылает электромагнитные импульсы в землю, чтобы измерить комбинацию почвы, камней и корней, а затем превращает собранные данные в карту. Датчик использует радиолокационные отражения очень высоких частот (VHF) подземных объектов для создания базовой карты недр. При повторном посещении LGPR, установленный под транспортным средством, измеряет текущие отражения подземных элементов дороги, и его алгоритм оценивает местоположение машины, сравнивая эти показания с базовой картой, которая хранится в памяти системы. Основным компонентом LGPR является водонепроницаемая 12-элементная антенная решетка.
Система имеет несколько преимуществ. Для нее не имеет значения, покрыта ли дорога снегом, либо видимость усложняет туман. Подземные же условия меняются реже. Однако исследователи признают, что система не работает так же хорошо в дождливых условиях, когда вода просачивается в землю под дорогой. Радар, по их мнению, должен использоваться в сочетании с другими технологиями.
Пока систему тестировали только на низких скоростях на закрытой проселочной дороге, однако исследователи считают, что ее можно применять и на шоссе.
Пока же команда планирует продолжить доработку аппаратного обеспечения, чтобы оно стало менее громоздким. Сейчас GPR имеет размеры 152 см x 61 см x 7,6 см. По мнению авторов разработки, из-за простоты своей конструкции она может массово выпускаться и стоить около $300.
Между тем Яндекс, который также имеет свой парк беспилотных автомобилей, в декабре объявил о том, что начнет использовать в них лидары и камеры собственного производства.
Компания создала два типа лидаров. Первый имеет встроенный лазер, который способен с высокой скоростью крутиться вокруг своей оси. Также лидар оснащен сенсорами для приема лучей. Он имеет обзор 360 градусов. Лидар собирает информацию об объектах, которые находятся вокруг беспилотного автомобиля. Второй — твердотельный, с встроенным стационарным лазером, имеющим подвижный отражатель. Его угол обзора составляет 120 градусов. Такое устройство можно применять для получения более детальной информации об объектах по направлению движения авто.
См. также:







