 Вертолет «Индженьюити» на высоте 5 метров над поверхностью Марса. Вид со стороны марсохода «Персеверанс».
Вертолет «Индженьюити» на высоте 5 метров над поверхностью Марса. Вид со стороны марсохода «Персеверанс».22 апреля 2021 года специалисты лаборатории реактивного движения NASA (Jet Propulsion Laboratory, JPL) рассказали, что марсианский вертолет «Индженьюити» успешно совершил свой второй полет.
Аппарат поднялся на пять метров, выполнил непродолжительное зависание, потом отлетел на 2 метра в сторону, выполнив небольшой (5 градусов) наклон, провел аэрофотосъемку местности в стабильном парении с поворотами вокруг своей оси (сделал три оборота на общую сумму около 276 градусов) и вернулся на стартовую площадку. Данная операция заняла около 51,9 секунд. Первый полет на три метра вверх длился 39 секунд.
 Изображение с бортовой камеры вертолета во время второго полета.
Изображение с бортовой камеры вертолета во время второго полета.Кадры полета вертолета с зависанием вертолета в верхней точке полета и поворотом вокруг оси. Источник изображения — бортовая камера марсохода.
 Вертолет «Индженьюити» в процессе второго полета.
Вертолет «Индженьюити» в процессе второго полета.Сотрудники JPL получили данные о втором полете.
НАСА уточнило, что телеметрия полета вертолета оказалась в ожидаемый пределах, он смог успешно совершить все заложенные ранее в него маневры.
НАСА пообещало позже показать цветные фото и видео второго полета со стороны вертолета.
 Вертолет «Индженьюити» после второго полета.
Вертолет «Индженьюити» после второго полета. Фактически «Индженьюити» на Марсе уже реализовал такие достижения:
- первый самостоятельный отрыв от поверхности;
- первый автономный полет без управления или прерывания со стороны оператора с Земли;
- первая посадка БПЛА на Марсе;
- достиг потолка 5 метров;
- совершил двадцатисекундное стабильное парение;
- выполнил элементы бокового полета.
Стоимость этого научного проекта составила $80 млн.
НАСА рассказало, что каждая секунда каждого полета вертолета предоставляет множество полетных данных о Марсе, которые будут сравниваться с моделированием, симуляциями и тестами, выполненными на Земле. Специалисты JPL уже получили свой первый практический опыт удаленного управления винтокрылым аппаратом на Марсе. Эти наборы данных окажутся неоценимыми для потенциальных будущих миссий на Марс, в которых могут быть задействованы вертолеты следующего поколения, которые НАСА уже планирует к разработке.
Поскольку данные телеметрии, логов и изображения с марсохода показывают, что вертолет не только успешно пережил второй полет, но и выполнял его так, как ожидалось, специалисты JPL рассматривают варианты, как лучше всего расширить профили его следующих полетов, чтобы получить дополнительные аэронавигационные данные из первых успешных летных испытаний на другой планете.
Технические характеристики марсианского БПЛА.
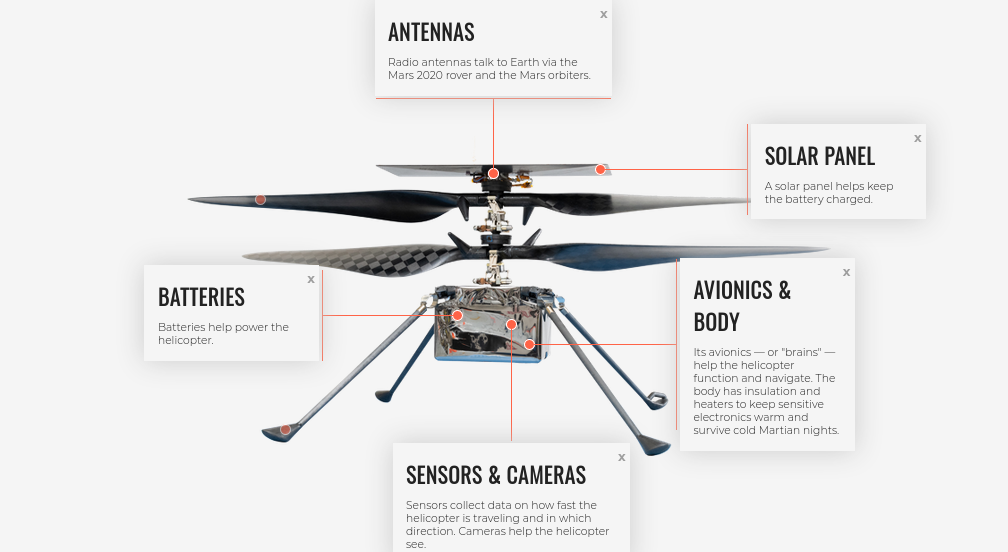
Вертолет «Индженьюити» имеет массу 1,8 кг (0,68 кг в марсианской гравитации), четыре опоры с посадочными чашками, на его борту установлены две цветные камеры (0,5 МП для ориентации и 13 МП для аэрофотосъемки в 4K), система навигации, включая лазерный высотомер от SparkFun Electronics и гиростабилизатор (IMU), система передачи данных (канал связи до 250 Кбит/с на расстоянии до 800 метров от марсохода), а также аккумуляторные батареи и солнечная панель. На дроне установлены два соосных несущих контрвращающихся карбоновых винта диаметром 1,2 метра каждый, их обороты будут достигать 2 537 в минуту. Заряда батарей должно хватать на один полутораминутный полет, потом аппарату нужна посадка, подзарядка батарей, тестирование внутренних систем и заливка нового ПО для полета.
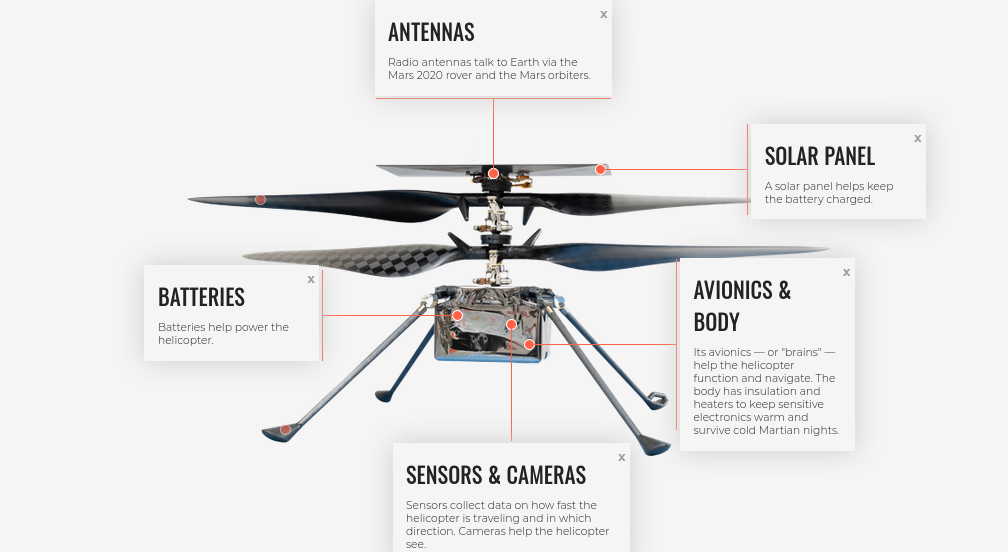
Элементы марсианского вертолета.
Аппаратные системы «Индженьюити» основаны на плате SoC Snapdragon 801. В нем установлен Linux и открытое ПО. Вертолет будет летать самостоятельно, без участия оператора. Он должен взлетать, делать несколько маневров и приземляться, ориентируясь на местности автономно, задействуя лишь минимум команд с Земли, отправленных заранее.
Заявленное НАСА время автономной работы дрона на поверхности Марса — 30 солов (31 земные сутки). За это время он должен был подготовить свои бортовые системы, совершить первый тестовый полет, состоящий из тридцатисекундного подъема на три метра, а также четыре-пять запланированных полетов на дальние расстояния, в которых он будет подниматься на высоту до 5 метров и отлетать от марсохода на расстояние до 100 метров. Фактически пятая часть этого времени уже прошла, а вертолет еще не взлетел даже один раз. Вероятно, что количество его полетов НАСА сократит из-за деградации батарей и проблем с незащищенной аппаратной частью, которая не сможет работать дольше расчетного срока.
Цель использования первого БПЛА на Марсе — разведка, исследование труднодоступных мест и сбор данных для создания более совершенных дронов, способных работать в разреженной атмосфере планеты в будущем.
«Марс труден не только тогда, когда вы приземляетесь, но и когда вы пытаетесь оторваться от него и летать вокруг над планетой», — пояснила вчера руководитель проекта «Индженьюити» МиМи Аунг (MiMi Aung). О том, какие трудности возникли при реализации этого проекта, можно почитать в этой публикации на Хабре.
Элементы марсианского вертолета.
Аппаратные системы «Индженьюити» основаны на плате SoC Snapdragon 801. В нем установлен Linux и открытое ПО. Вертолет будет летать самостоятельно, без участия оператора. Он должен взлетать, делать несколько маневров и приземляться, ориентируясь на местности автономно, задействуя лишь минимум команд с Земли, отправленных заранее.
Заявленное НАСА время автономной работы дрона на поверхности Марса — 30 солов (31 земные сутки). За это время он должен был подготовить свои бортовые системы, совершить первый тестовый полет, состоящий из тридцатисекундного подъема на три метра, а также четыре-пять запланированных полетов на дальние расстояния, в которых он будет подниматься на высоту до 5 метров и отлетать от марсохода на расстояние до 100 метров. Фактически пятая часть этого времени уже прошла, а вертолет еще не взлетел даже один раз. Вероятно, что количество его полетов НАСА сократит из-за деградации батарей и проблем с незащищенной аппаратной частью, которая не сможет работать дольше расчетного срока.
Цель использования первого БПЛА на Марсе — разведка, исследование труднодоступных мест и сбор данных для создания более совершенных дронов, способных работать в разреженной атмосфере планеты в будущем.
«Марс труден не только тогда, когда вы приземляетесь, но и когда вы пытаетесь оторваться от него и летать вокруг над планетой», — пояснила вчера руководитель проекта «Индженьюити» МиМи Аунг (MiMi Aung). О том, какие трудности возникли при реализации этого проекта, можно почитать в этой публикации на Хабре.
19 апреля 2021 года марсианский вертолет «Индженьюити» успешно совершил свой первый тестовый автономный полет. Видео первого тестового полета марсианского вертолета «Индженьюити», сделанное марсоходом.
20 апреля НАСА показало на видео потоки марсианской пыли во время первого полета вертолета «Индженьюити».
21 апреля НАСА опубликовало подробное видео первого взлета и посадки вертолета «Индженьюити».







