6 июня 2022 года, спустя 430 земных суток после высадки на Марс, НАСА зафиксировало первую серьезную поломку у «Индженьюити». Телеметрия показала, что у вертолета вышел из строя инклинометр. НАСА будет имитировать работу навигационного датчика программным патчем во время попытки выполнить новый полет.
Ранее за 28 полетов у «Индженьюити» уже отказывали датчики и системы перед взлетом, не работали некоторые сервоприводы автомата перекоса (износ движущих частей), прерывалась работа системы радиосвязи с марсоходом, происходили фантомные сбои таймера навигационной камеры, также на нее попадали песок и пыль. Сейчас «Индженьюити» каждое утро просыпается с обнуленным системным таймером из-за деградации солнечной батареи и аккумуляторов, которые не могут за день зарядиться так, чтобы ночью хватало на обогрев внутренних систем.
За 28 полетов «Индженьюити» НАСА смогло удаленно решить большую часть проблем. Но вот инклинометр починить уже не в силах. Датчик выводит мусорные данные в бортовой компьютер и полностью перестал быть полезен. НАСА считает, что это произошло из-за недавнего перепада температур. Электроника вертолета не рассчитана на долгое ожидание включения при -80°C. НАСА ожидает, что другие приборы и датчики также могут работать во внештатном режиме, но когда это произойдет, сказать точно нельзя.
За день до первого полета НАСА оценило шанс успешного взлета в 85%. Тогда специалисты были почти уверены, что аппарат перейдет в режим полета и начнет выполнять все нужные команды для взлета и посадки. Теперь его рабочий жизненный цикл подходит к закату. «Риск отказа компонентов был всегда с момента десантирования вертолета на поверхность, но теперь этот риск значительно увеличился», — пояснили в НАСА.
Этот риск значительно увеличился, так как НАСА выяснило, что экстремальные температурные циклы между дневным и ночным временем вызывают непоправимые нагрузки, которые могут привести к выходу из строя компонентов электроники вертолета.
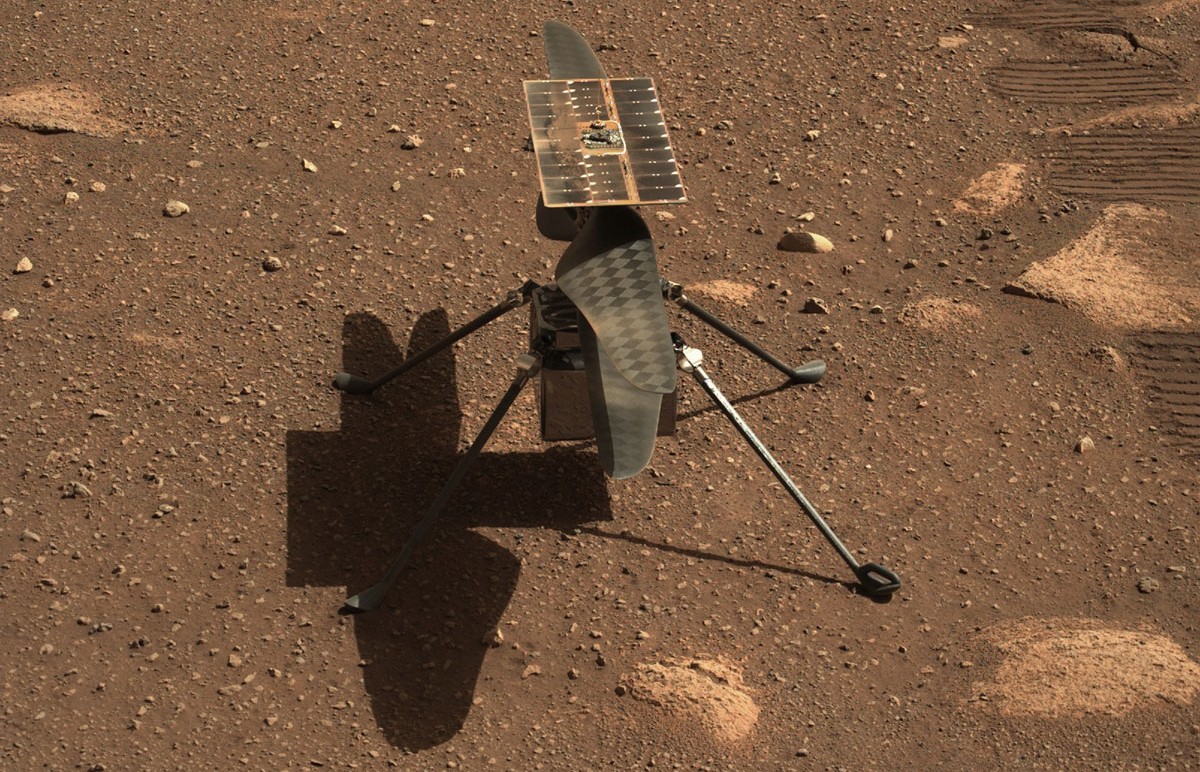
В ходе предполетного тестирования элементов вертолета, включая проверку датчиков и исполнительных механизмов, а также высокоскоростное вращение лопастей, выяснилось, что один из навигационных датчиков вертолета, называемый инклинометром, перестал работать. Неработающий навигационный датчик звучит как большая проблема, и это так. Но в НАСА считают, что это не обязательно конец полетов «Индженьюити» на Марсе. Инженеры придумали как его заменить программным способом.
НАСА раскрыло свой план по поводу имитации работы вышедших из строя навигационных датчиков. Когда «Индженьюити» летит, бортовая система управления полетом тщательно отслеживает текущее положение, скорость и ориентацию вертолета. Это достигается с помощью комплекта датчиков, состоящего из инерциального измерительного блока (IMU), который измеряет ускорения и угловые скорости в трех направлениях, лазерного дальномера, измеряющего расстояние до поверхности Марса и навигационной камеры, которая делает снимки поверхности после взлета на высоту 1 метр и выше (чтобы пыль не мешала).
Данные с этих датчиков обрабатываются специальным набором программных алгоритмов на навигационном компьютере «Индженьюити». Чтобы алгоритмы работали правильно, они должны быть инициализированы до взлета с помощью данных о точной оценке положения «Индженьюити» по крену и тангажу. Тут на помощь приходит инклинометр.
Инклинометр состоит из двух акселерометров, единственной целью которых является измерение силы тяжести перед раскруткой лопастей и взлетом. Направление воспринимаемой гравитации используется для определения того, как «Индженьюити» ориентирован относительно направления вниз, так как поверхность места посадки часто неровная и фиксируется крен частей вертолета. Инклинометр не используется во время самого полета, но без него НАСА вынуждено искать новый способ инициализации навигационных алгоритмов перед взлетом.
НАСА пояснило, что нашло возможность выполнить имитацию работы инклинометра. Повезло, что текущий набор датчиков «Индженьюити» обеспечивает некоторую избыточность, когда речь идет об определении положения на земле. IMU содержит свои акселерометры, которые, как и акселерометры инклинометра, можно использовать для оценки исходного положения. В отличие от инклинометра, IMU не предназначен для определения статической ориентации, поэтому его первоначальные оценки положения, как правило, будут несколько менее точными. Тем не менее, НАСА считает, что даже такая первоначальная оценка положения на основе IMU позволит «Индженьюити» безопасно взлететь и, таким образом, обеспечит приемлемый запасной вариант для попытки возобновить полеты.
НАСА раскрыло, что разработало патч для полетного программного обеспечения «Индженьюити» и занимается его установкой. Патч вставляет небольшой фрагмент кода в программное обеспечение, работающее на бортовом компьютере «Индженьюити», перехватывая входящие мусорные пакеты от инклинометра и вводя замещающие пакеты, созданные на основе данных от акселерометров IMU. Для инициализации навигационных алгоритмов все будет выглядеть как прежде, с той лишь разницей, что полученные пакеты инклинометра на самом деле исходят не от инклинометра, а от IMU.
НАСА еще в прошлом году предвидело некоторые ситуации с выходом из строя датчиков «Индженьюити» и подготовило план действий в конкретных случаях. И сейчас один из таких моментов настал. НАСА не пришлось тратить время на создание обновления для программы бортового компьютера «Индженьюити», инженеры просто взяли нужный код из ранее созданной папки на сервере для таких ситуаций на Земле и теперь передают его на Марс.
НАСА планирует закончить апгрейд ПО «Индженьюити» в течение нескольких дней. Потом опять начнется процесс проверки бортовых систем, чтобы убедиться, что новое программное обеспечение установлено, применено корректно и работает в соответствии с планом по имитации инклинометра.
Потом НАСА надеется выполнить небольшой полет №29 на юго-запад, чтобы сохранить возможность радиоконтакта с марсоходом на время зимнего периода на Марсе. НАСА планирует, что через несколько месяцев «Индженьюити» сможет проснуться и сделать несколько полетов или хотя бы помахать на прощание лопастями, когда марсоход поедет дальше от него на сотни метров, оставив вертолет в одиночестве. Это может случится через четыре-шесть месяцев.
Самые проблемные времена с охлаждением электроники у вертолета уже настали — это июнь и июль. В августе погода начнет меняться, а «Индженьюити», в случае штатной работы систем обогрева и электроники, сможет передвинуться еще ближе к марсоходу. Его миссия не включает в себя подъем и обогрев вертолета. Вероятность такого развития ситуации мала, но инженеры НАСА хотят, чтобы «Индженьюити» еще полетал, хотя бы на небольшие расстояния.
 Недавно «Индженьюити» пролетал место проезда марсохода.
Недавно «Индженьюити» пролетал место проезда марсохода.В числе данных, которые передал «Индженьюити», есть видео с бортовой камеры его рекордного полета №25 на 704 метра. Тогда аппарат летел на высоте 10 метров со скоростью 5.5 м/c и провел в атмосфере 161.3 секунды. Видео ускорено в пять раз. Камера включается при наборе высоту более 1 метра от поверхности.
Видео полета №25
В настоящее время марсоход «Персеверанс» выполняет свою основную научную миссию, собирая образцы марсианского грунта, и находится на удалении нескольких сот метров от «Индженьюити» в устье кратера Езеро, представляющее собой веерообразную дельту высохшей реки. Вертолёт долетел туда прямиком через безопасные промежуточные места посадки, которые он выбирал с помощью специального программного алгоритма НАСА.

Согласно текущей статистике, «Индженьюити» пробыл в рабочем режиме на Марсе в более чем 12 раз дольше расчетного времени: 461 сол (марсианских суток), как и марсоход «Персеверанс», но 396 солов на поверхности планеты — автономно. Вертолет был спроектирован на 30 суток работы в условиях Марса после высадки с марсохода. Оказалось, что его возможности позволяют летать и дольше. НАСА в августе 2021 года продлило работу «Индженьюити» на 2022 год в режиме зонда-разведчика для фиксирования с воздуха возможных препятствий и выбора оптимальных путей движения марсохода. Он будет летать еще как минимум до сентября 2022 года, если решатся проблемы со связью и батареей.
Камера марсохода запечатлела 8 апреля 2021 года процедуру проверки работы роторов «Индженьюити»
«Индженьюити» за 28 миссий и год работы пролетел в общем 6909 метров над поверхностью Марса и провел в режиме полета в атмосфере планеты 3255 секунды (более 54 минут). Достиг потолка 12 метров и развил максимальную скорость 5,5 м/c. За все полеты «Индженьюити» сделал с помощью своих камер несколько сотен цветных фотографий и более 3 тыс. черно-белых фотографий.
Примечательно, «Индженьюити» преодолел в атмосфере планеты две трети дистанции, которую марсоход «Персеверанс» в режиме научных исследований проехал по поверхности за все время.
Аппаратные системы «Индженьюити» основаны на плате SoC Snapdragon 801. В его бортовой системе установлен Linux и открытое ПО.
19 апреля «Индженьюити» совершил первый автономный полет, а марсоход сделал и прислал на Землю его видеозапись







