Часть 1
Часть 3
Продолжаем строить гусеничного робота.
В первой части мы с вами подобрали и, надеюсь, заказали все необходимые детали. Кстати, недавно проверял, все детали Tamiya (гусеницы, площадки, мотор-редукторная коробка) были в наличии в Terraelectronica. Подороже, конечно, чем из Китая, но зато рядом.
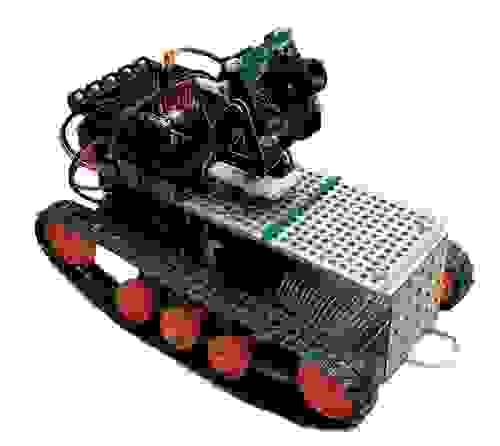
Те, кто уже получил детали, наверняка уже собрали шасси.
Теперь займемся бортовой электроникой, видеоподсистемой и питанием.
Моторы уже подключены к MotorShield. Пора установить связь с ПК.
Для этого берем Bluetooth модуль и подключаем его пины T и R к пинам 0(Rx) и 1 (Tx) Arduino. + и — подключаем соответственно к пинам +5 и GND. Не перепутайте полярность питания — модуль может сгореть.
При подаче питания на Arduino модуль должен мигать светодиодом — он готов к подключению.
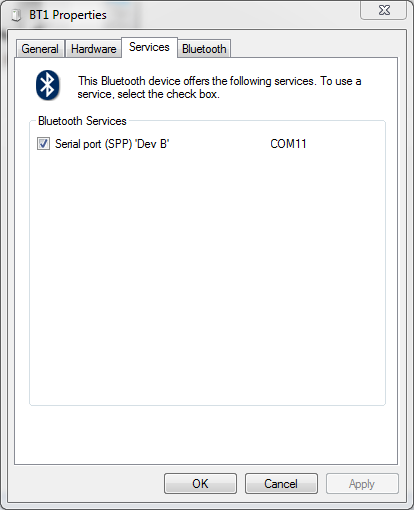
Идем на ПК, ищем bluetooth устройство с именем «linvor» — это имя модуля по умолчанию. В дальнейшем его, как и скорость работы можно изменить с помощью AT команд. (В частности, я свой настроил на 115200 вместо 9600 и дал имя «BT1»). Спариваем ПК с модулем, используя код «1234». В системе должно появиться 2 COM порта — один для исходящих соединений, другой для входящих. Нас интересует именно первый.
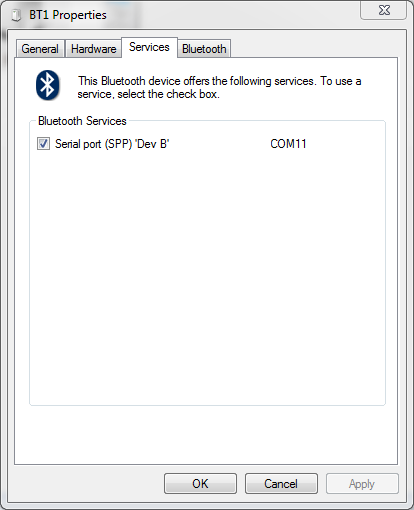
Выпишите номер COM порта, он нам пригодится потом для подключения. Если портов в свойствах устройства два и вы не можете определить который исходящий, запишите оба, определите позже методом тыка.
Сначала я заказал вот такой комплект:

Но при попытке избавиться от толстого шнурка, я спалил камеру. Если вы аккуратнее, то все, что вам нужно, это закрепить камеру на роботе винтиком и подать на нее 12В (от 9В у меня вопреки заявляениям китайцев не работает). Передающая часть готова.
Для приемной части есть два пути — купить маленький телевизор на 4-7" (я себе недавно такой купил) или подключить к ПК/ноутбуку.
Для второго варианта нам понадобится подключить EasyCAP к ПК, поставить драйвер и установить любую программу, которая может выводить изображение с устройства видеозахвата. Я использую DScaler.
А для того, чтобы удобнее было пользоваться, ресивер и EasyCAP я встроил в коробку от комлекта ресивера с камерой. Туда же можно положить аккумулятор для питания ресивера. Для этого в задней стенке прорезал отверстия под разъем антенны, ручки подстройки ресивера и под USB разъем EasyCAP.
Внутри коробки соединяем выходы ресивера со входами CVRS и Audio (если есть микрофон на камере). Предварительно сняв ручку и антенну, просовываем в отверстия ресивер и EasyCAP. Крепим к дну двусторонним или обычным скотчем оба девайса.

«1.2GHz Receiver+EasyCAP»
Снаружи навинчиваем антенну и надеваем колпачок и ручку. Подключать EasyCAP к ПК или ноуту будем комплектным удлинительным шнурком.

«1.2GHz Receiver+EasyCAP»
На этом этапе полезно подать питание на камеру, включить ресивер и попробовать в DScaler сначала подключиться к EasyCAP (устройство видно как USB VideoGrabber) а затем ручкой настройки на ресивере поймать сигнал с камеры.
Если все собрано правильно, поздравляю — видеотракт готов, можно побаловаться с ним.
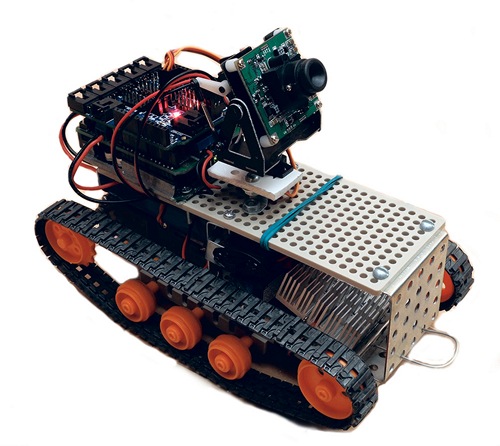
Если вы заказали поворотно-наклонную (PanTilt) площадку и сервоприводы, то нужно собрать подвес камеры. Все соединения делаются обычным суперклеем, но будьте осторожны, сервоприводы приклеиваются намертво! Поэтому стоит проверить все дважды.
Камеру на площадку крепим разъемом вниз, в сторону поворотной (Pan) сервы.
Перед установкой камеры, найдите среднее положение поворотного сервопривода и надев качалку в этом положении так, чтобы камера смотрела вперед, прикрутите шурупом.
К поворотному сервоприводу я вырезал из белого акрила скобу, с помощью которой немного удобнее крепить к площадке всю конструкцию. можно напрямую длинным винтиком М3 или с помощью П-образной детальки конструктора, как у меня:
К самой скобе сервопривод крепится комплектными шурупами. В конструкторе винтики М4, поэтому мне пришлось немного рассверлить отверстия в плате.
Сервоприводы подключаем так: коричневый и красный провод — +5 и Gnd соответственно, оранжевый — сигнал управления. Сигнальный провод сервы вращения подключаем к пину D10 Arduino, сигнальный провод сервы наклона камеры — к пину D9. На sensor shield есть удобные трехконтактные разъемы GND,VCC,Dx для каждого цифрового пина Arduino. Сделаны специально для такого случая — штекер сервы подключается напрямую без дополнительных проводков.
Так как я спалил свою камеру, да и качество ее не особо высокое было, то я купил модуль Sony 1/3" CCD

К счастью, передатчик убитой камеры уцелел и я припаял его напрямую к камере Sony, аккуратно выпаяв его из сгоревшей дешевой камеры.
Питание камеры и передатчика я объединил, припаяв на один штеккер и затянув в термоусадку.
У передатчика желтый провод — видеовход, белый — аудиовход, красный и черный как обычно — + питания и земля, но питание от преобразователя, встроенного в шнурок, поэтому нужно запомнить какой провод шел к передатчику, когда отпаивать будете. У меня получилось вот так:

«Sony CCD camera & 1.2GHz Transmitter»
Передатчик греется во время работы, но это особенность его конструкции, что-то там китайцы намудрили с питанием, видимо.
Моторы и Arduino мы будем питать от одного источника, для этого переключатель Ext/Ard на MotorShield установим в положение Ard. Теперь напряжение 7-12В можно подать через стандартный разъем питания Arduino или через клеммник на MotorShield.
Для питания камеры и передатчика можно использовать либо отдельный аккумулятор на 12Вили вот такой бустер (недавно появился в продаже):

К сожалению, в описании на HK ошибка — от 2S он не работает, все равно нужно 12в (3S)и более на входе.
Аккумулятор устанавливаем на первом этаже. Спереди этажи можно скрепить металлической скобой из конструктора, чтобы второй этаж не болтался.
Ура, аппаратная часть готова. Осталось написать прошивку для микроконтроллера и программу для ПК.
P.S. Вопрос — на новогодних каникулах кто-нибудь собирается этим заниматься или отложить написание последней статьи на середину января?
Часть 3
Продолжаем строить гусеничного робота.
В первой части мы с вами подобрали и, надеюсь, заказали все необходимые детали. Кстати, недавно проверял, все детали Tamiya (гусеницы, площадки, мотор-редукторная коробка) были в наличии в Terraelectronica. Подороже, конечно, чем из Китая, но зато рядом.
Те, кто уже получил детали, наверняка уже собрали шасси.
Теперь займемся бортовой электроникой, видеоподсистемой и питанием.
Bluetooth
Моторы уже подключены к MotorShield. Пора установить связь с ПК.
Для этого берем Bluetooth модуль и подключаем его пины T и R к пинам 0(Rx) и 1 (Tx) Arduino. + и — подключаем соответственно к пинам +5 и GND. Не перепутайте полярность питания — модуль может сгореть.
При подаче питания на Arduino модуль должен мигать светодиодом — он готов к подключению.
Идем на ПК, ищем bluetooth устройство с именем «linvor» — это имя модуля по умолчанию. В дальнейшем его, как и скорость работы можно изменить с помощью AT команд. (В частности, я свой настроил на 115200 вместо 9600 и дал имя «BT1»). Спариваем ПК с модулем, используя код «1234». В системе должно появиться 2 COM порта — один для исходящих соединений, другой для входящих. Нас интересует именно первый.
Выпишите номер COM порта, он нам пригодится потом для подключения. Если портов в свойствах устройства два и вы не можете определить который исходящий, запишите оба, определите позже методом тыка.
Видеоподсистема
Сначала я заказал вот такой комплект:

Но при попытке избавиться от толстого шнурка, я спалил камеру. Если вы аккуратнее, то все, что вам нужно, это закрепить камеру на роботе винтиком и подать на нее 12В (от 9В у меня вопреки заявляениям китайцев не работает). Передающая часть готова.
Для приемной части есть два пути — купить маленький телевизор на 4-7" (я себе недавно такой купил) или подключить к ПК/ноутбуку.
Для второго варианта нам понадобится подключить EasyCAP к ПК, поставить драйвер и установить любую программу, которая может выводить изображение с устройства видеозахвата. Я использую DScaler.
А для того, чтобы удобнее было пользоваться, ресивер и EasyCAP я встроил в коробку от комлекта ресивера с камерой. Туда же можно положить аккумулятор для питания ресивера. Для этого в задней стенке прорезал отверстия под разъем антенны, ручки подстройки ресивера и под USB разъем EasyCAP.
Внутри коробки соединяем выходы ресивера со входами CVRS и Audio (если есть микрофон на камере). Предварительно сняв ручку и антенну, просовываем в отверстия ресивер и EasyCAP. Крепим к дну двусторонним или обычным скотчем оба девайса.

«1.2GHz Receiver+EasyCAP»
Снаружи навинчиваем антенну и надеваем колпачок и ручку. Подключать EasyCAP к ПК или ноуту будем комплектным удлинительным шнурком.

«1.2GHz Receiver+EasyCAP»
На этом этапе полезно подать питание на камеру, включить ресивер и попробовать в DScaler сначала подключиться к EasyCAP (устройство видно как USB VideoGrabber) а затем ручкой настройки на ресивере поймать сигнал с камеры.
Если все собрано правильно, поздравляю — видеотракт готов, можно побаловаться с ним.
Pan&Tilt
Если вы заказали поворотно-наклонную (PanTilt) площадку и сервоприводы, то нужно собрать подвес камеры. Все соединения делаются обычным суперклеем, но будьте осторожны, сервоприводы приклеиваются намертво! Поэтому стоит проверить все дважды.
Камеру на площадку крепим разъемом вниз, в сторону поворотной (Pan) сервы.
Перед установкой камеры, найдите среднее положение поворотного сервопривода и надев качалку в этом положении так, чтобы камера смотрела вперед, прикрутите шурупом.
К поворотному сервоприводу я вырезал из белого акрила скобу, с помощью которой немного удобнее крепить к площадке всю конструкцию. можно напрямую длинным винтиком М3 или с помощью П-образной детальки конструктора, как у меня:
К самой скобе сервопривод крепится комплектными шурупами. В конструкторе винтики М4, поэтому мне пришлось немного рассверлить отверстия в плате.
Сервоприводы подключаем так: коричневый и красный провод — +5 и Gnd соответственно, оранжевый — сигнал управления. Сигнальный провод сервы вращения подключаем к пину D10 Arduino, сигнальный провод сервы наклона камеры — к пину D9. На sensor shield есть удобные трехконтактные разъемы GND,VCC,Dx для каждого цифрового пина Arduino. Сделаны специально для такого случая — штекер сервы подключается напрямую без дополнительных проводков.
Так как я спалил свою камеру, да и качество ее не особо высокое было, то я купил модуль Sony 1/3" CCD

К счастью, передатчик убитой камеры уцелел и я припаял его напрямую к камере Sony, аккуратно выпаяв его из сгоревшей дешевой камеры.
Питание камеры и передатчика я объединил, припаяв на один штеккер и затянув в термоусадку.
У передатчика желтый провод — видеовход, белый — аудиовход, красный и черный как обычно — + питания и земля, но питание от преобразователя, встроенного в шнурок, поэтому нужно запомнить какой провод шел к передатчику, когда отпаивать будете. У меня получилось вот так:

«Sony CCD camera & 1.2GHz Transmitter»
Передатчик греется во время работы, но это особенность его конструкции, что-то там китайцы намудрили с питанием, видимо.
Питание
Моторы и Arduino мы будем питать от одного источника, для этого переключатель Ext/Ard на MotorShield установим в положение Ard. Теперь напряжение 7-12В можно подать через стандартный разъем питания Arduino или через клеммник на MotorShield.
Для питания камеры и передатчика можно использовать либо отдельный аккумулятор на 12В

К сожалению, в описании на HK ошибка — от 2S он не работает, все равно нужно 12в (3S)и более на входе.
Аккумулятор устанавливаем на первом этаже. Спереди этажи можно скрепить металлической скобой из конструктора, чтобы второй этаж не болтался.
Ура, аппаратная часть готова. Осталось написать прошивку для микроконтроллера и программу для ПК.
P.S. Вопрос — на новогодних каникулах кто-нибудь собирается этим заниматься или отложить написание последней статьи на середину января?








