Опрос в моём предыдущем посте «Управляем роботом-пылесосом iRobot Roomba через ИК» показал, что сообществу интересно узнать, как изготовить самому ИК-пульт для Roomb-ы. Итак, встречайте! =)
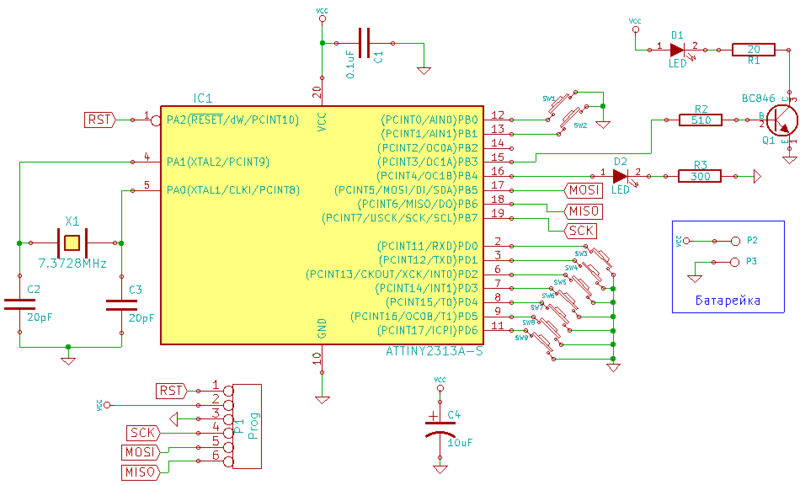
Схема пульта:
Я использовал:
Изначально я планировал сделать «спартанский» вариант — плата с кнопками в термоусадке, но потом всё-таки решил собрать всё в корпусе. Корпус выбирал из того, что есть в продаже, мне понравился GAINTA G401. Под него и делал плату:

Функции кнопок:
SW1 — Dock
SW2 — Pause/Power
SW3 — Forward Left
SW4 — Clean
SW5 — Left
SW6 — Forward
SW7 — Spot
SW8 — Right
SW9 — Forward Right
Как в последствии выяснилось, кнопка SW2, которая, по задумке, при нажатии передаёт команду «Pause», а при долгом нажатии «Power» — не нужна, т.к. эти функции выполняет кнопка «Clean». Она работает так же, как и кнопка на самом роботе-пылесосе: короткое нажатии — чистить, во время работы — остановка, а долгое нажатие — выключение. Т.ч. если кто будет повторять пульт — просто не устанавливайте SW2.
Фото в сборе:
Подписи кнопок, конечно, выглядят коряво — теперь я понимаю, что гравировка — дело не простое! :)
Сама плата:


Проводники, которые предполагалось выполнять на обратной стороне сделал проводами.
Видео, демонстрирующие работу:
Файлы KiCAD-проекта: RemoteControlPCB.zip.
Прошивка: RoombaRemoteControl.elf.hex.
Для прошивки через программатор USBasp, программой avrdude:
Прошивка fuse-битов для работы с кварцем:

Схема пульта:

Я использовал:
- МК ATTINY2313A-SU,
- кнопки DTSM-20,
- транзистор BC846,
- SMD светодиод для индикации,
- ИК-диод L-34F3C,
- кварц на 7,3728МГц.
- несколько резисторов и конденсаторов.
Изначально я планировал сделать «спартанский» вариант — плата с кнопками в термоусадке, но потом всё-таки решил собрать всё в корпусе. Корпус выбирал из того, что есть в продаже, мне понравился GAINTA G401. Под него и делал плату:

Функции кнопок:
SW1 — Dock
SW2 — Pause/Power
SW3 — Forward Left
SW4 — Clean
SW5 — Left
SW6 — Forward
SW7 — Spot
SW8 — Right
SW9 — Forward Right
Как в последствии выяснилось, кнопка SW2, которая, по задумке, при нажатии передаёт команду «Pause», а при долгом нажатии «Power» — не нужна, т.к. эти функции выполняет кнопка «Clean». Она работает так же, как и кнопка на самом роботе-пылесосе: короткое нажатии — чистить, во время работы — остановка, а долгое нажатие — выключение. Т.ч. если кто будет повторять пульт — просто не устанавливайте SW2.
Листинг программы
/*
Пульт управление роботом-пылесосом Irobot Roomba. Программа для контроллера Atmel ATTINY2313A.
FUSE-биты:
Fuse Low Byte:
CKDIV|CKOUT|SUT|SKSEL|
0 | 1 |10 |0100 | 0x64 Default
1 | 1 |10 |1100 | 0b11101100=0xEC для кварца 3-8 МГц
*/
//#define F_CPU 7.3728E6
//#define __AVR_ATtiny2313A__
#include <avr/io.h>
#include <avr/interrupt.h>
#include <avr/sleep.h>
/*------<Макросы>-----*/
//Частота 39477 Гц
//Период 25,3 мкс:
#define P_GEN {TCNT0=0; PORTB |= 0x8; while (TCNT0 < 93); PORTB &= ~0x8; while (TCNT0 < 186);}
//Roomba коды:
#define LEFT 129
#define FORWARD 130
#define RIGHT 131
#define SPOT 132
#define DOCK 133
#define CLEAN 136
#define PAUSE 137
#define POWER 138
#define FORWARD_LEFT 139
#define FORWARD_RIGHT 140
#define TEST 170
/*----------------<Функции:>----------------*/
void init(void)
{
//Установка делителя частоты на /1:
CLKPR = (1<<CLKPCE);
CLKPR = (0<<CLKPS0)|(0<<CLKPS1)|(0<<CLKPS2)|(0<<CLKPS3);
//Настройка портов:
PORTD = 0xFF;
DDRD = 0x0;
PORTB = (1<<PORTB0)|(1<<PORTB1)|(1<<PORTB2);
DDRB = (1<<DDB3)|(1<<DDB4);
//Настройка прерываний:
GIMSK = 0x30; //(1<<PCIE)|(1<<4);
PCMSK = 0x3; //(1<<PCINT0)|(1<<PCINT1);
PCMSK2 = 0x7F;
}
void ir_tx(unsigned char data_ir)
{
PORTB |= (1<<PB4); //Включим светодиод
/*
Кодирование данных:
1:
__________
2862uS |988uS
|_____
0:
_____
887uS| 2862uS
|__________
В конце пауза ~16870 uS
*/
unsigned char cnt;
//Настраиваем таймеры:
TCCR0B = (0<<CS12)|(0<<CS11)|(1<<CS10); // Для несущей f/1
TCCR1B = (0<<CS12)|(1<<CS11)|(1<<CS10); // Для данных f/64
for (cnt=0; cnt<8; cnt++)
{
TCNT1=0;
if (data_ir & (0x80 >> cnt))
{ //Если 1
while (TCNT1 < 330) P_GEN;
while (TCNT1 < (330+114)) ;
}
else
{ //Если 0
while (TCNT1 < 113) P_GEN;
while (TCNT1 < (330+114)) ;
}
}
TCNT1=0;
while (TCNT1 < 1950) ;
PORTB &= ~(1<<PB4); //Выключим светодиод
}
void send_command(void)
{
volatile unsigned char button_b;
volatile unsigned char button_d;
volatile unsigned char button_b_new;
volatile unsigned char button_d_new;
unsigned char pause_cnt = 0;
TCCR1B = (0<<CS12)|(1<<CS11)|(1<<CS10); // f/64
TCNT1=0;
while (TCNT1 < 346); //346 - Задержка 3 ms
button_b = ~PINB & ((1<<PINB0)|(1<<PINB1));
button_d = ~PIND & 0x7F;
button_b_new = button_b;
button_d_new = button_d;
while ((button_b == button_b_new)&&(button_d == button_d_new))
{
if ((button_b_new == 0) && (button_d_new == 0)) break;
if (button_b == (1<<PINB0)) {ir_tx(DOCK);}
if ((pause_cnt < 20) && (button_b == (1<<PINB1))) {ir_tx(PAUSE); pause_cnt++;}
if (pause_cnt >= 20) {ir_tx(POWER);}
if (button_d == (1<<PIND0)) {ir_tx(FORWARD_LEFT);}
if (button_d == (1<<PIND1)) {ir_tx(CLEAN);}
if (button_d == (1<<PIND2)) {ir_tx(LEFT);}
if (button_d == (1<<PIND3)) {ir_tx(FORWARD);}
if (button_d == (1<<PIND4)) {ir_tx(SPOT);}
if (button_d == (1<<PIND5)) {ir_tx(RIGHT);}
if (button_d == (1<<PIND6)) {ir_tx(FORWARD_RIGHT);}
button_b_new = ~PINB & ((1<<PINB0)|(1<<PINB1));
button_d_new = ~PIND & 0x7F;
}
}
/*----------------------<Обработка прерываний:>------------------------*/
ISR(PCINT_B_vect)
{
cli();
send_command();
sei();
}
ISR(PCINT_D_vect)
{
cli();
send_command();
sei();
}
/*-----------------<основной цикл программы>-----------------------*/
int main(void)
{
init();
sei();
for(;;)
{
set_sleep_mode(SLEEP_MODE_PWR_DOWN);
sleep_mode();
}
}
Фото в сборе:

Подписи кнопок, конечно, выглядят коряво — теперь я понимаю, что гравировка — дело не простое! :)
Сама плата:


Проводники, которые предполагалось выполнять на обратной стороне сделал проводами.
Видео, демонстрирующие работу:
Файлы KiCAD-проекта: RemoteControlPCB.zip.
Прошивка: RoombaRemoteControl.elf.hex.
Для прошивки через программатор USBasp, программой avrdude:
avrdude -p t2313 -c usbasp -U flash:w:./RoombaRemoteControl.elf.hex
Прошивка fuse-битов для работы с кварцем:
avrdude -p t2313 -c usbasp -U lfuse:w:0xEC:m







