Для танцевальной новогодней вечеринки решил сделать простую лазерную установку, которая бы в такт музыке что-нибудь демонстрировала. Под рукой была лазерная указка с набором сменных вращающихся колпачков, которые позволяли получать симпатичные эффекты на потолке. Добавив пару сервоприводов и arduino mini pro — получил искомое.
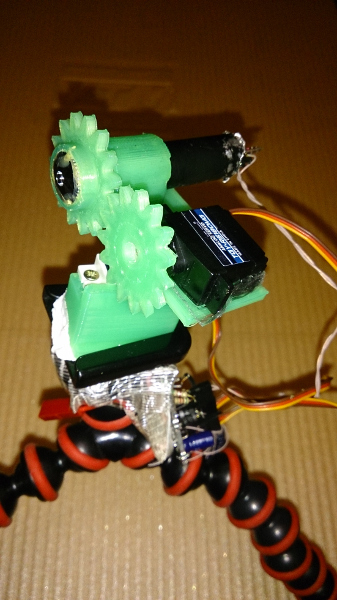
Схема очень простая (один ключ, управляющий лазерной указкой; пара кремниевых диодов, для понижения напряжения для указки; резистор для электретного микрофона и готовый модуль DC-DC преобразователя напряжения от аккумулятора в пять вольт), выполнил на отрезке макетной платы.
Микрофон при таком простейшем включении — имеет довольно низкую чувствительность, так что устройство нужно ставить достаточно близко к колонкам.
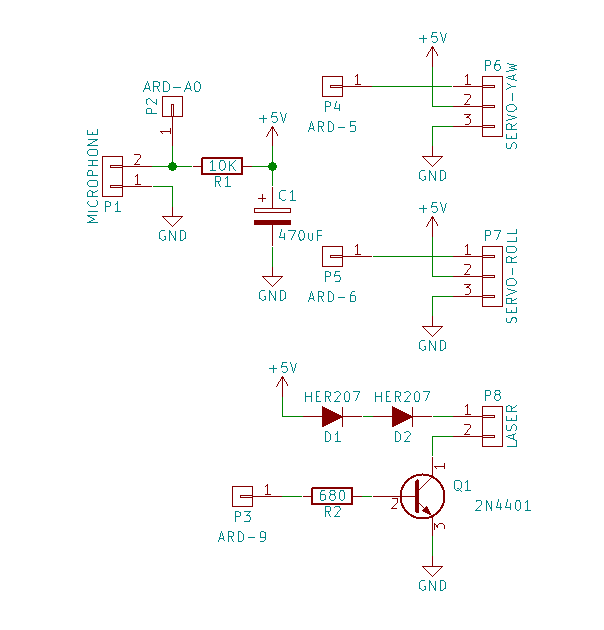
Надо заметить, что несмотря на наличие ключа для управления лазерной указкой — он у меня фактически не используется (всегда включен), так что можно просто выкинуть. Ну или добавить какое-нибудь моргание, если хочется.
Теоретически, гораздо лучше было бы использовать двигатель с редуктором для вращения колпачка (чтобы избежать заметного дрожания), но с сервоприводом получилось проще (напечатал пару шестеренок на принтере и все).
Сервоприводы — Turnigy TGY-R5180MG (180 градусов, для вращения колпачка) и какая-то старая 9 граммовая серва (для вращения самого устройства). Подставка — треножник от вентилятора, которые hobbyking продавала как-то за копейки.
Видео работы:
Скетч:
Спасибо за внимание!
Схема очень простая (один ключ, управляющий лазерной указкой; пара кремниевых диодов, для понижения напряжения для указки; резистор для электретного микрофона и готовый модуль DC-DC преобразователя напряжения от аккумулятора в пять вольт), выполнил на отрезке макетной платы.
Микрофон при таком простейшем включении — имеет довольно низкую чувствительность, так что устройство нужно ставить достаточно близко к колонкам.
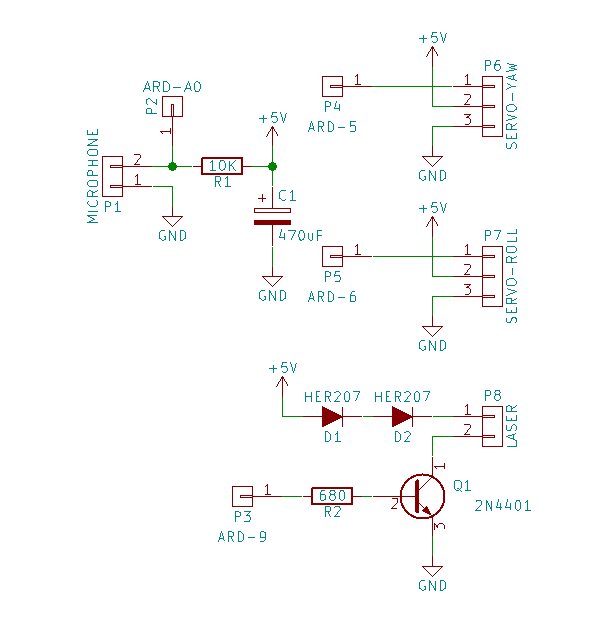
Надо заметить, что несмотря на наличие ключа для управления лазерной указкой — он у меня фактически не используется (всегда включен), так что можно просто выкинуть. Ну или добавить какое-нибудь моргание, если хочется.
Теоретически, гораздо лучше было бы использовать двигатель с редуктором для вращения колпачка (чтобы избежать заметного дрожания), но с сервоприводом получилось проще (напечатал пару шестеренок на принтере и все).
Сервоприводы — Turnigy TGY-R5180MG (180 градусов, для вращения колпачка) и какая-то старая 9 граммовая серва (для вращения самого устройства). Подставка — треножник от вентилятора, которые hobbyking продавала как-то за копейки.
Видео работы:
Скетч:
#include <Servo.h>
// yaw servo - PWM
#define SERVO_YAW 5
// roll servo - PWM
#define SERVO_ROLL 6
// Laser pin - PWM or DO
#define LASER 9
// Microphone input - A0
#define MIC A0
// Yaw servo period (in ms)
#define YAW_PERIOD 40
// Roll servo period (in ms)
#define ROLL_PERIOD 100
// MIN value for yaw servo
#define MIN_YAW 40
// MAX value for yaw servo
#define MAX_YAW 130
// MIN value for roll servo
#define MIN_ROLL 10
// MAX value for roll servo
#define MAX_ROLL 150
Servo yaw_servo;
Servo roll_servo;
// Current position and direction for servos
int16_t roll_pos = MIN_ROLL;
int8_t roll_dir = 1;
int16_t yaw_pos = MIN_YAW;
int8_t yaw_dir = 1;
// Sound peak detected
boolean flag_sound = false;
// Internal sound volume average stuff
int16_t arr_vol[32];
int8_t arr_pos = 0;
unsigned long last_sound = 0;
// Detect sound volume peaks
void check_sound() {
int16_t volume = analogRead(MIC);
int i;
int32_t sum;
int16_t average;
// Calculate average from last reads
arr_vol[arr_pos] = volume;
arr_pos++;
if (arr_pos > (sizeof(arr_vol) / sizeof(arr_vol[0])))
arr_pos = 0;
sum = 0;
for (i = 0; i < (sizeof(arr_vol) / sizeof(arr_vol[0])); i++)
sum += arr_vol[i];
average = sum / (sizeof(arr_vol) / sizeof(arr_vol[0]));
if (flag_sound && ((millis() - last_sound) > 200))
flag_sound = false;
if ((millis() - last_sound) < 300)
return;
if (volume > (average + 4)) {
flag_sound = true;
last_sound = millis();
}
} // void check_sound()
unsigned long last_yaw = 0;
// Rotate yaw servo
void rotate_yaw() {
if ((millis() - last_yaw) < YAW_PERIOD)
return;
last_yaw = millis();
yaw_pos += yaw_dir;
// Change rotate direction when reached limit
if ((yaw_pos >= MAX_YAW) || (yaw_pos <= MIN_YAW))
yaw_dir = -yaw_dir;
yaw_servo.write(yaw_pos);
} // void rotate_yaw()
unsigned long last_roll = 0;
// Rotate roll servo
void rotate_roll() {
if ((millis() - last_roll) < ROLL_PERIOD)
return;
last_roll = millis();
roll_pos += roll_dir;
// Rotate faster when we detect sound peaks
if (flag_sound) {
roll_pos += (8 * roll_dir);
if (roll_pos < MIN_ROLL)
roll_pos = MIN_ROLL;
if (roll_pos > MAX_ROLL)
roll_pos = MAX_ROLL;
}
// Change rotate direction when reached limit
if ((roll_pos >= MAX_ROLL) || (roll_pos <= MIN_ROLL))
roll_dir = -roll_dir;
roll_servo.write(roll_pos);
} // void rotate_roll()
void setup() {
// put your setup code here, to run once:
pinMode(LASER, OUTPUT);
digitalWrite(LASER, HIGH);
yaw_servo.attach(SERVO_YAW);
yaw_servo.write(yaw_pos);
roll_servo.attach(SERVO_ROLL);
roll_servo.write(roll_pos);
Serial.begin(115200);
delay(300);
} // void setup()
void loop() {
// put your main code here, to run repeatedly:
check_sound();
rotate_yaw();
rotate_roll();
delay(10);
} // void loop()Спасибо за внимание!








