Комментарии 40
Поток мыслей.
Для формул хорошо использовать http://latex.codecogs.com/eqneditor/editor.php:

И можно ли дать ссылку на то откуда вообще этот вопрос взялся? А то непосвященному читателю непонятно.
И можно ли дать ссылку на то откуда вообще этот вопрос взялся? А то непосвященному читателю непонятно.
Первое, что нужно сделать — расшифровать аббревиатуру «КА». После этого — рассказать, что такое ориентация и зачем она нкдна. И только после этого можно поставить тот текст, который есть.
А, так значит, под Δφ вы понимали не ширину интервала допустимых отклонений (который у вас равен 2φT) — а допустимый выход за границу срабатывания датчика?
Теперь формула перестала казаться бредом.
Лично мне всегда казалось, что φ0 >> Δφ — а потому для достижения минимума целевой функции (которая равна 2φT) надо уменьшать φ0, для чего надо повышать точность двигателя.
Но, оказалось, я жил в прошлом веке, а в 21м ограничивающим фактором давно является не точность двигателя, а точность датчиков. φ0 — на самом деле константа, а нам остается только уменьшать Δφ. Да, при таких условиях и правда — более мощный двигатель будет справляться лучше.
Теперь формула перестала казаться бредом.
Лично мне всегда казалось, что φ0 >> Δφ — а потому для достижения минимума целевой функции (которая равна 2φT) надо уменьшать φ0, для чего надо повышать точность двигателя.
Но, оказалось, я жил в прошлом веке, а в 21м ограничивающим фактором давно является не точность двигателя, а точность датчиков. φ0 — на самом деле константа, а нам остается только уменьшать Δφ. Да, при таких условиях и правда — более мощный двигатель будет справляться лучше.
I и l — это что? Момент инерции и плечо? В тексте не подписано.
Из формулы к слову, ИМХО, следует то что для повышения точности ориентации в первую очередь нужно улучшать точность датчика угловых скоростей т.к. w0 играет наибольшую роль :). Почему кстати в качестве w0 указано 1e-4? Это для какого типа датчика, вроде же высококлассные FOG-и дают до 1e-7?
Из формулы к слову, ИМХО, следует то что для повышения точности ориентации в первую очередь нужно улучшать точность датчика угловых скоростей т.к. w0 играет наибольшую роль :). Почему кстати в качестве w0 указано 1e-4? Это для какого типа датчика, вроде же высококлассные FOG-и дают до 1e-7?
Поясню почему я спрашиваю: мне бы хотелось понять какого порядка величины должны получаться согласно сабжевой формуле.
Сдается мне что с нормальными датчиками угловой скорости речь пойдет о долях ватт и станет очевидно что указанная формула не является определяющим фактором при определении потребной мощности.
Сдается мне что с нормальными датчиками угловой скорости речь пойдет о долях ватт и станет очевидно что указанная формула не является определяющим фактором при определении потребной мощности.
Из перехода между формулами очевидно, что это — момент инерции и плечо.
Хм, наверное, несколько дополнений сделаю.
Сейчас для ориентации спутника используются ионные двигатели. Они маломощные, но этого достаточно. Более того, я не могу согласиться с выражением «Чем меньше отклонение КА от требуемого углового положения в процессе поддержания заданной ориентации (выше точность), тем больше потребная тяга УРД.». Вспомним ТАУ, в котором чем больше тяга двигателя, тем больше коэфициент усиления сигнала управления (который здесь представляет собой две обратные отрицательные связи по положению и угловой скорости). Чем выше коэффициент усиления, тем меньше частота, при которой процесс сходится. Грубо говоря, неудачный маневр и у вас процесс разойдется полностью.
Более того, чем мощнее двигатель, тем сложнее им точно управлять. Химические реактивные двигатели вообще сложно сделать с управляемой тягой. А это означает, что у него так или иначе есть минимальный уровень тяги, которую он развивает, который может превосходить потребный. Ну и быстрое потребление топлива тоже никому не нужно. Думаю, что если у вас не идеальный двигатель, который может моментально включаться и выключаться (тогда можно проинтегрировать время его работы для получения необходимого импульса) — избыток тяги будет приводить к тому, что спутник будет все сильнее и сильнее раскручиваться, пока колебательный процесс вокруг нуля не разойдется окончательно.
Тем не менее, есть и минимальная тяга (коэффициент усиления сигнала управления) двигателя, при котором эта задача вообще решается. Иначе если он банально не будет успевать повернуть за заданное время, скоро он уйдет совсем. И этот минимум определяется траекторией.
Ну и помарка по поводу систем ориентации. Астродатчики — это, конечно, круто, но сейчас ставится основной упор на межспутниковую связь, вот в ГЛОНАСС активно внедряют систему ориентации на этой основе. Зона нечувствительности в этой системе крайне мала, если не отсутствует вовсе (покуда аппарат никогда не будет ориентирован одновременно на все спутники), да и СКО ошибки мал.
Сейчас для ориентации спутника используются ионные двигатели. Они маломощные, но этого достаточно. Более того, я не могу согласиться с выражением «Чем меньше отклонение КА от требуемого углового положения в процессе поддержания заданной ориентации (выше точность), тем больше потребная тяга УРД.». Вспомним ТАУ, в котором чем больше тяга двигателя, тем больше коэфициент усиления сигнала управления (который здесь представляет собой две обратные отрицательные связи по положению и угловой скорости). Чем выше коэффициент усиления, тем меньше частота, при которой процесс сходится. Грубо говоря, неудачный маневр и у вас процесс разойдется полностью.
Более того, чем мощнее двигатель, тем сложнее им точно управлять. Химические реактивные двигатели вообще сложно сделать с управляемой тягой. А это означает, что у него так или иначе есть минимальный уровень тяги, которую он развивает, который может превосходить потребный. Ну и быстрое потребление топлива тоже никому не нужно. Думаю, что если у вас не идеальный двигатель, который может моментально включаться и выключаться (тогда можно проинтегрировать время его работы для получения необходимого импульса) — избыток тяги будет приводить к тому, что спутник будет все сильнее и сильнее раскручиваться, пока колебательный процесс вокруг нуля не разойдется окончательно.
Тем не менее, есть и минимальная тяга (коэффициент усиления сигнала управления) двигателя, при котором эта задача вообще решается. Иначе если он банально не будет успевать повернуть за заданное время, скоро он уйдет совсем. И этот минимум определяется траекторией.
Ну и помарка по поводу систем ориентации. Астродатчики — это, конечно, круто, но сейчас ставится основной упор на межспутниковую связь, вот в ГЛОНАСС активно внедряют систему ориентации на этой основе. Зона нечувствительности в этой системе крайне мала, если не отсутствует вовсе (покуда аппарат никогда не будет ориентирован одновременно на все спутники), да и СКО ошибки мал.
Так, поправлю сам себя же в некоторых местах, покуда ответ мой не соответствует диплому по навигационным системам.
Сразу, кому интересно и кто в свое время упустил такую замечательную вещь, как ТАУ (теория автоматизированного управления) рекомендую книгу Бесикерского. Не самая простая книга, местами с любимыми математиками «очевидным образом следует», а ты потом два дня пытаешься понять, что это за очевидный образ, но на третьем курсе это было нашей библией, которую мы читали перед сном.
Итак. Первая оговорка — сигнал управления приходит в виде требуемого углового положения. В примитивном случае из него вычитается ГООС, получившееся значение называется рассогласованием (в данном случае угол рассогласования) умножается на коэффициент усиления, дважды интегрируется (покуда является силой, точнее, в данном случае моментом), и замыкается обратно. Коэффициент усиления в этом случае напрямую определяется мощностью двигателя (не всегда тягой можно управлять), массой инерции аппарата и прочими узлами. В общем, включает в себя мат. модель системы. Разумеется, в такой модели будут колебания (сначала он пройдет необходимый угол, начнет возвращаться и так дальше). Этот процесс может как сходиться, так и расходиться. Его сходимость как раз определяется усилением. Тем не менее, время нарастания (время, за которое величина рассогласования перестает выходить за «трубку», пределы, как правило, 5% от первоначального отклонения) получается недопустимо большим. В худшем случае, покуда требуемый угол постоянно меняется, оно становится бесконечным, покуда система так и не успевает установиться.
Тут многие должны вспомнить о такой штуке, как ПИД. Он позволит получить необходимый процесс схождения с условием, что мы можем менять тягу двигателя. Как бонус — самое слабое звено — «дифференцированние» у нас получается не численным методом (брать производную от случайной величины тот еще гемор), а снятием показания датчиков (датчиков угловой скорости). Тем не менее, покуда у нас негитара зомби квадракоптер за три тысячи рублей, ПИД нам тоже не сильно подходит. Либо я не познал дзен его настройки, либо это само по себе геморно, вдобавок, он очень сильно зависит от точности мат. модели и быстро расходится. Спутники, летающие по высокоэллептической орбите, постоянно меняют свои характеристики, покуда разный уровень радиации, температуры, скорости, перегрузок. К счастью, ТАУ на ПИДах не заканчивается, но дальнейшая теория слишком сложная и уже немного выходит за рамки данной статьи (тем более, комментария). Ну и если уж очень интересно — книгу я уже рекомендовал.
Тут я хотел дальше рассказать о двигателях, но получилось слишком много, да и мои знания в этой области немного уступают, тем не менее, на хабре уже были обзоры двигателей, можно обратиться туда.
Резюмирую: если у вас нет (а его нет) двигателя с огромной мощностью, но либо: практически мгновенно включающийся, либо меняющий свою мощность в большом диапазоне, слишком мощный двигатель пойдет только во вред. Надеюсь, из короткого обзора ТАУ это понятно.
Теперь о минимуме. Не сразу понял, что в статье как раз говорится о том, какой он должен быть. Тем не менее, говорится опять же не совсем верно, покуда, к сожалению, формулы для этого гораздо сложнее и определяются требуемыми перегрузками и определяются исключительно траекторией. Ну и есть сотни инженерных ухищрений, позволяющих уменьшить потребную тягу, например, перед маневром с большими перегрузками начать разворачивать спутник заранее.
P.S. «Чем выше коэффициент усиления, тем меньше частота, при которой процесс сходится.» — эта частота называется «частотой среза», смысл в том, что если потребный угол будет меняться с меньшей частотой, чем частота среза, система будет сходиться. На частоте среза — устойчивое положение (не сходится, не расходится), на большей частоте — будет расходиться.
P.P.S. Все никак не решусь, стоит ли делать краткий экскурс в инерциальную навигацию (собираюсь разбить на несколько статей — в первой будет физика, история, системы координат, во второй подробнее о классических гироскопах и акселлерометрах, в третьей — более современные решения, типа лазерных гироскопов, МИМС) или это никому не интересно и зря потрачу время?
Сразу, кому интересно и кто в свое время упустил такую замечательную вещь, как ТАУ (теория автоматизированного управления) рекомендую книгу Бесикерского. Не самая простая книга, местами с любимыми математиками «очевидным образом следует», а ты потом два дня пытаешься понять, что это за очевидный образ, но на третьем курсе это было нашей библией, которую мы читали перед сном.
Итак. Первая оговорка — сигнал управления приходит в виде требуемого углового положения. В примитивном случае из него вычитается ГООС, получившееся значение называется рассогласованием (в данном случае угол рассогласования) умножается на коэффициент усиления, дважды интегрируется (покуда является силой, точнее, в данном случае моментом), и замыкается обратно. Коэффициент усиления в этом случае напрямую определяется мощностью двигателя (не всегда тягой можно управлять), массой инерции аппарата и прочими узлами. В общем, включает в себя мат. модель системы. Разумеется, в такой модели будут колебания (сначала он пройдет необходимый угол, начнет возвращаться и так дальше). Этот процесс может как сходиться, так и расходиться. Его сходимость как раз определяется усилением. Тем не менее, время нарастания (время, за которое величина рассогласования перестает выходить за «трубку», пределы, как правило, 5% от первоначального отклонения) получается недопустимо большим. В худшем случае, покуда требуемый угол постоянно меняется, оно становится бесконечным, покуда система так и не успевает установиться.
Тут многие должны вспомнить о такой штуке, как ПИД. Он позволит получить необходимый процесс схождения с условием, что мы можем менять тягу двигателя. Как бонус — самое слабое звено — «дифференцированние» у нас получается не численным методом (брать производную от случайной величины тот еще гемор), а снятием показания датчиков (датчиков угловой скорости). Тем не менее, покуда у нас не
Тут я хотел дальше рассказать о двигателях, но получилось слишком много, да и мои знания в этой области немного уступают, тем не менее, на хабре уже были обзоры двигателей, можно обратиться туда.
Резюмирую: если у вас нет (а его нет) двигателя с огромной мощностью, но либо: практически мгновенно включающийся, либо меняющий свою мощность в большом диапазоне, слишком мощный двигатель пойдет только во вред. Надеюсь, из короткого обзора ТАУ это понятно.
Теперь о минимуме. Не сразу понял, что в статье как раз говорится о том, какой он должен быть. Тем не менее, говорится опять же не совсем верно, покуда, к сожалению, формулы для этого гораздо сложнее и определяются требуемыми перегрузками и определяются исключительно траекторией. Ну и есть сотни инженерных ухищрений, позволяющих уменьшить потребную тягу, например, перед маневром с большими перегрузками начать разворачивать спутник заранее.
P.S. «Чем выше коэффициент усиления, тем меньше частота, при которой процесс сходится.» — эта частота называется «частотой среза», смысл в том, что если потребный угол будет меняться с меньшей частотой, чем частота среза, система будет сходиться. На частоте среза — устойчивое положение (не сходится, не расходится), на большей частоте — будет расходиться.
P.P.S. Все никак не решусь, стоит ли делать краткий экскурс в инерциальную навигацию (собираюсь разбить на несколько статей — в первой будет физика, история, системы координат, во второй подробнее о классических гироскопах и акселлерометрах, в третьей — более современные решения, типа лазерных гироскопов, МИМС) или это никому не интересно и зря потрачу время?
Стоит, интересно.
Все никак не решусь, стоит ли делать краткий экскурс в инерциальную навигацию (собираюсь разбить на несколько статей — в первой будет физика, история, системы координат, во второй подробнее о классических гироскопах и акселлерометрах, в третьей — более современные решения, типа лазерных гироскопов, МИМС) или это никому не интересно и зря потрачу время?
делайте, конечно.
С удовольствием почитаю =)
Не самая простая книга, местами с любимыми математиками «очевидным образом следует», а ты потом два дня пытаешься понять, что это за очевидный образ
Вот за что я очень люблю книги наших отечественных ученых — это за такие «очевидно следующие» вещи и за прочее заумно-научное изложение простых казалось бы вещей. :)
Так что желающим разобраться в ТАУ рекомендую отложить Бесекерских в сторону и начинать сразу с классиков
нет никакого схождения процесса.
ориентация к ГЛОНАСС отношения не имеет.
нет никакого избытка тяги, учитывается/интегрируется и запуск и последействие.
ТАУ конечно в аппарате где-то работает, но не так как вы это представляете.
ориентация к ГЛОНАСС отношения не имеет.
нет никакого избытка тяги, учитывается/интегрируется и запуск и последействие.
ТАУ конечно в аппарате где-то работает, но не так как вы это представляете.
нет никакого схождения процесса.
Если вы имеете ввиду «такой штуки как схождение процесса не существует» — что? С чего вдруг? Если имеете ввиду, что «процесс никогда не сойдется», то «ТАУ конечно в аппарате где-то работает» и работает именно тут и именно для схождения. Для этого придумали целую огромную теоретическую базу, а вы предлагаете выкинуть это и пользоваться формулой 10 класса?
ориентация к ГЛОНАСС отношения не имеет.
Я имел ввиду ориентация самих спутников созвездия ГЛОНАСС. Впрочем, как только будет обкатано на них, межспутниковой ориентацией будут пользоваться все. Это отдельная большая тема, но, в общем, он тут еще как причем.
нет никакого избытка тяги, учитывается/интегрируется и запуск и последействие.
Многие двигатели запускаются достаточно долго, как бы вам того не хотелось, небольшую угловую скорость ими не придать. Крутанет что будь здоров. Да, это двигатели с большой тягой, огромной для таких задач, но покуда я оспаривал «тем больше потребная тяга УРД», то это актуально.
ТАУ конечно в аппарате где-то работает, но не так как вы это представляете.
Как минимум, даже выполняя простейшее соотношение (уменьшение разности между текущим угловым положением и требуемым) выполняет автопилот. Это 100% ТАУ, как бы вам другого не хотелось. Более того, если вдруг даже это делает человек с Земли, это такое же ТАУ, только со звеном задержки.
Поскольку в процессе поддержания заданной ориентации технически невозможно обеспечить нулевое значение угловой скорости КА.
Ориентация самих спутников ГЛОНАСС по Земле и Солнцу.
Ориентация самих спутников ГЛОНАСС по Земле и Солнцу.
Поскольку в процессе поддержания заданной ориентации технически невозможно обеспечить нулевое значение угловой скорости КА.
Для этого вводят допустимые пределы, при которых считается, что «процесс сошелся». Согласен, что из-за отсутствия демфирования естественной среды получить услоно нулевое значение угловой скорости (условно, потому что, как правило, он должен вращаться с заданной скоростью, которая еще и меняется) крайне сложно. Возможно, но долго, громоздко, сложно и не эффективно. Да и зачем? Аппаратура, ради которой это делается, либо имеет достаточно большой угол, при котором она фукнционирует, либо имеет свою собственную стабилизацию, покуда её в разы проще сделать.
Ориентация самих спутников ГЛОНАСС по Земле и Солнцу.
Ориентация самих спутников ГЛОНАСС, как и прочих, происходит гораздо сложнее, чем по Земле и Солнцу. И я рассказал (о боже, может это коммерческая или военная тайна) как это планируется делать в будущем. Настолько планируется, что я лично знаю людей, занимающихся этим.
Вообще у меня возникло ощущение, что у вас слишком простое представление об управлении спутником. Задача эта крайне не тривиальная, покуда включает из себя смесь кучи физических процессов, теории автоматического управления, теории оптимального управления, которая, в свою очередь, представляет из себя задачу возмущенно-невозмущенного движения, минимаксную задачу, управление под действием случайных и даже неопределенных факторов (о которых известно только их допустимые значения, больше ничего), поэтому решается отдельно методом максимума Понтрягина, а в процессе полета решением уравнений Белмана (что тот еще геморойнее, чем настраивать ПИД. Сильно геморойнее, покуда идет интегрирование с конца и необходимо хранить все возможные состояния до момента пока не придешь в текущее, после этого только получаешь требуемое управление), при этом всем там стоит здоровенный нелинейный фильтр Калмана (наверное, сейчас даже модный ныне
И это я описал только то, с чем я бы сам смог на данный момент справиться. Однако знакомые (вы уж простите, такая специфика кафедры), работающие в этой области, уверяют, что это все цветочки по сравнению с тем, как там на самом деле. Все гораздо сложнее.
Вы же привели формулу, которую должен уметь вывести самостоятельно 10-ти классник, и оперируете ей как единственно верной. Не исключаю, что ваши познания в данной области сильно превосходят мои. Но, в данный момент, вы всячески этому противоречите.
про ГЛОНАСС видимо путаете ориентацию и положение на орбите. поскольку длина электромагнитной волны измеряется метрами, что соизмеримо с размерами КА, я не представляю как вы ориентируете аппарат измеряя его положение относительно других аппаратов. Понтрягин и Белман тоже скорее всего имеют отношение к движению.
свет гораздо надёжнее электромагнитной волны. думаю от определения координат звёзд нескоро откажутся.
да я не очень хорошо помню ТАУ, но я-таки инженер-испытатель по системам управления движением КА в Плесецке. по балистике вот недавно доподготавливался. программирование практикую. так что представление есть.
все подробности рассказывать не планировал. вопрос был лишь: больше точность — больше тяга.
свет гораздо надёжнее электромагнитной волны. думаю от определения координат звёзд нескоро откажутся.
да я не очень хорошо помню ТАУ, но я-таки инженер-испытатель по системам управления движением КА в Плесецке. по балистике вот недавно доподготавливался. программирование практикую. так что представление есть.
все подробности рассказывать не планировал. вопрос был лишь: больше точность — больше тяга.
как вы ориентируете аппарат измеряя его положение относительно других аппаратов.
Способов несколько. От банально наличия двух (трех) датчиков, разнесенных на некоторое расстояние, до непосредственно определения угловых координат других спутников в созвездии (аналогично астродатчику).
свет гораздо надёжнее электромагнитной волны
Не мог не придраться, но свет — такая же электромагнитная волна.
больше точность — больше тяга
Я привел достаточно аргументированный аргумент, говорящий о максимальном пределе тяги. Более подробно — нужно поднимать больше теории управления системами, но тем, кто не знает эту тему, придется рассказать несколько лекций, а кто знает, уже все понял.
Недостаток вашей же формулы, ну и почему я утверждаю, что потребная тяга выбирается из требуемых перегрузок (ах не нравится это слово в ключе вращения, но аналога слову «перегрузка» для углового движения не вспомню), это то, что она не учитывает время. Т.е. учитывает, но даже слабый двигатель из-за отсутствия сопротивления рано или поздно войдет в некий допустимый коридор. Вот только обычно требуется, чтобы это произошло «рано».
Понтрягин и Белман тоже скорее всего имеют отношение к движению.
Я знаю, что задача навигации и ориентации разделяются на две. Но в управлении неизбежно приходится учитывать как линейное, так и угловое движение, и задача решается совместно.
не такая же. вы не сможете обеспечить такую же прямолинейность распространения электромагнитной волны как у лазера.
положение спутника ГЛОНАСС определяется с Земли лазером. точность определения = длина волны.
у лазера сантиметры.
положение спутника ГЛОНАСС определяется с Земли лазером. точность определения = длина волны.
у лазера сантиметры.
«у лазера сантиметры
На сколько я помню, длина волны оптического диапазона — нанометры (если точнее, от 400 до 740нм). Только вот далеко не каждый лазерный дальномер позволяет определять с такой точностью. А это еще не учитывая атмосферу. И да, точность определения != длине волны, все немножко (точнее сильно) хитрее. Если это фазовый дальномер, то лазер модулируется гораздо меньшей частотой, покуда для длины волны в сантиметр вы физически не сможете определить в каком именно сантиметре находится объект. Если это импульсный, то максимальная точность (точнее, СКО ошибки) определяется из неоднородности задержек в атмосфере, а не длиной волны.
Ну и, к тому же, кто вдруг сказал, что межспутниковая связь осуществляется не тем же лазером? А из-за отсутствия большого влияния атмосферы, там то как раз получается большая точность. И опять же, мы ориентируем спутник, а не решаем навигационную задачу, нам нужно знать угловые координаты других спутников, в модели ошибки данного датчика длина волны вносит достаточно малые проблемы.
Да, у этого метода есть свои проблемы, например, без поддержки с Земли все созвездие может точно позиционироваться относительно друг друга, однако одновременно смещаться вокруг той самой Земли. Но все это задумано, в первую очередь, чтобы созвездие было автономным, покуда наземные измерительные пункты обходятся достаточно дорого (там дорогая аппаратура, высокоточные часы, охрана в виде армии). Но к теме это не относится.
не войдёт. вы не сможете обеспечить требуемую точность двигателем слабее чем нужно.
Вопрос. Получается, что после применения управляющего воздействия, аппарат вынужден бороться со своим же управляющим воздействием. Такой процесс никогда не сойдётся. Или это следует из упрощения задачи?

Что если на спадающей ветви параболы начинать тормозить наше вращение, чтоб в положении равновесия наш аппарат остановился? Как это на самом деле происходит?
Что если на спадающей ветви параболы начинать тормозить наше вращение, чтоб в положении равновесия наш аппарат остановился? Как это на самом деле происходит?
В статье описаны тупейшие датчики, которые могут выдавать только −1, 0, +1, практически напрямую подключенные к исполнительным устройствам. Причем, что датчики, что устройства — идеальные, у которых порог срабатывания точно фиксирован и время реакции нулевое. Я допускаю, что на первых спутниках стояла такая система управления на парочке реле, а неидеальностью устройств можно было пренебречь на фоне требуемой точности, однако современные КА, очевидно, имеют гораздо более точные датчики и нормальную цифровую систему управления.
Однако, даже если в эту примитивную модель добавить время задержки при отключении двигателя, то без проблем получим очевидный вывод, что при достаточно больших тягах точность ориенации падает. (При слишком малых тягах точность тоже падает, поэтому в реальности есть оптимальное значение тяги.)
Однако, даже если в эту примитивную модель добавить время задержки при отключении двигателя, то без проблем получим очевидный вывод, что при достаточно больших тягах точность ориенации падает. (При слишком малых тягах точность тоже падает, поэтому в реальности есть оптимальное значение тяги.)
Ну нет, это все же не так. В статье фигурируют датчики выдающие 0 в некотором диапазоне околонулевых скоростей и положений, о том что идет за пределами этого диапазона вопрос не ставится вообще. Исходя из этой предпосылки автор ставит вопрос о том насколько сильно уйдет ориентация КА в теоретически худшей ситуации — угловая скорость аппарата максимальна, но датчик еще показывает ноль и то что спутник движется детектируется только когда он уходит настолько далеко что это вызывает появление ненулевого смещения на датчике положения. Ну а из этого расчета уже выводится зависимость минимальной мощности двигателя от максимально допустимого ухода ориентации.
Ошибка автора я думаю в том что там если взять реальные цифры с нормальным датчиком скоростей то эта минимальная оценка мощности окажется до смешного ничтожной и ни на что реально не влияющей.
Ошибка автора я думаю в том что там если взять реальные цифры с нормальным датчиком скоростей то эта минимальная оценка мощности окажется до смешного ничтожной и ни на что реально не влияющей.
Хоть здесь уже ответили более сведущие люди, всё же внесу свои пять копеек.
На всякий случай повторю тезисы статьи, как я их понял. Итак, автор привёл следующую картинку:
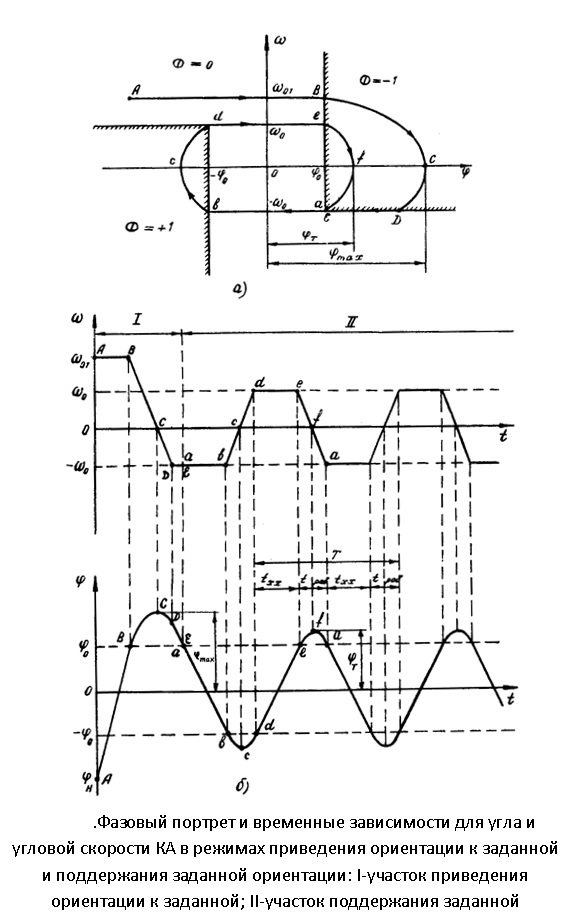
Где φ0 — зона нечувствительности датчика угла, а ω0 — зона нечувствительности датчика угловой скорости, сиречь при отклонениях меньше φ0 и ω0 датчики говорят, что мы ориентированы абсолютно точно и имеем нулевую угловую скорость.
Далее рассматривается отрезок кривой bcd и утверждается следующее — что чем больше угловое ускорение (и, стало быть, тяга двигателя), тем мы быстрее пройдём сей отрезок и тем меньше будет максимальное отклонение φmax (каковое достигается в точке b). И действительно, сложно с этим спорить. В этом смысле можно согласиться — при прочих равных в такой модели φmax тем меньше, чем мощнее двигатель.
Но давайте взглянем на вопрос ширше. Автор приводит формулу, к которой у меня снова нет претензий:
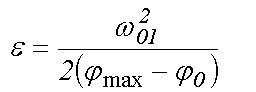
, где ε — угловое ускорение. Что мы видим в этой формуле?
Во-первых, в знаменателе стоит φmax — φ0. То есть, даже имея бесконечно мощный (и бесконечно точный) двигатель, мы лишь сведём максимальное отклонение к погрешности датчика φ0. Что, впрочем, и следовало ожидать. Стало быть, дальнейшего увеличения точности мы можем добиться только уменьшением погрешности датчика.
Во-вторых, в числителе мы с удивлением обнаруживаем ω0, причём в квадрате. А значит, что вместо того, чтобы увеличивать мощность двигателя в четыре раза, можно уменьшить погрешность гироскопа всего в два раза!
Таким образом, вместо того, чтобы увеличивать мощность, мы можем уменьшать погрешность датчиков. Причём улучшение гироскопа даст нам куда больший эффект, чем такое же относительное увеличение мощности, а улучшение датчика ориентации и вовсе даст эффект, недостижимый ни мощностью, ни гироскопом.
Но может быть, датчики уже некуда улучшать? Автор любезно предоставил нам порядки величин погрешностей:
φ0 = 10-2 — 10-3 рад, ω0 = 10-3 — 10-4 рад/с.
10-3 рад — это камера в мобильном телефоне. Ежели нам действительно важна точность, можно сделать звёздную камеру и получше. Насчёт гироскопа не уверен, зато я догадываюсь, как сделать датчик угловой скорости, имея датчик ориентации. Берём старую добрую производную по времени, сиречь делим изменение угла на изменение времени. Ежели мы меряем угол с точностью 10-3, то подождав 10 секунд, получим те самые 10-4/с. А подождав 100 секунд — 10-5/с, 1000 секунд — 10-6/с и т. п. А куда нам, собственно, в космосе спешить? Заметьте, просто проявив чуточку терпения (скажем, 100 секунд), мы добились эффекта, сопоставимого со стократным увеличением мощности нашего двигателя ориентации!
И ежели уж на то пошло, оценим, каким должно быть угловое ускорение, чтобы ошибка от маломощности двигателя (вкупе с несовершенством датчика угловой скорости!) была сопоставима с ошибкой от несовершенства датчика ориентации. Это просто — возведём всё те же 10-4/с в квадрат и поделим на 2*10-3. И получаем 5*10-6/с2.
Грубо говоря, ежели наш спутник суть кольцо массой в одну тонну, а два двигателя ориентации направлены параллельно кольцу, то при означенных автором погрешностях их суммарная тяга должна быть равна 5 грамм-сил. Что вполне вписывается в диапазон ионных двигателей. А всё, что больше, будет уменьшать ошибку, но совершенно несообразно увеличению мощности, как мы видели.
Но, может быть, ежели мы будем уменьшать допустимую ошибку, увеличивая точность датчиков, нам придётся увеличить мощность двигателя? И снова нет! Поскольку ω0 у нас в квадрате, а φ0 в знаменателе в первой степени, при пропорциональном уменьшении этих величин потребная мощность точно так же снижается!
Можно привести аналогию с автомобилем. Известно, что чем мощнее автомобиль, тем он лучше разгоняется. Так давайте сделаем бесконечно мощный автомобиль, чтобы быстрее добираться до работы! Построили, поехали, а тут вдруг оказалось, что на 200 км/ч машина как-то подозрительно хрустит. А тут ещё штраф за превышение выписали. И ладно бы штраф, так ещё и в пробке всё равно два часа стоять пришлось. Вот так же и со спутником — хотя мощность и увеличивает точность, но дальше какого-то предела её увеличивать не имеет смысла.
Более того, чем мощнее двигатель, тем сложнее будет точно дозировать импульс. Посему есть подозрение, что после какого-то предела мощности точность ориентации вновь будет падать. Не говоря уже об том, что внутренности спутника будет болтать, и вряд ли ему это понравится.
Наконец, заметим, что нынче у любого спутника есть маховики. А значит, основная работа по ориентации проводится маховиками, а двигателю вообще не имеет смысла быть заметно мощнее, чем средний момент внешних сил, действующий на корабль.
В общем, мораль сей басни такова. Ежели рассматривать утверждение «чем мощнее двигатели, тем точнее ориентация» — то оно вполне может выполняться, и то не всегда. Но ежели рассмотреть то утверждение, с которого всё началось («чем точнее ориентация, тем мощнее должны быть двигатели») — то на это я вынужден сказать своё твёрдое нет.
Ах да. Ещё непонятно, отчего увеличение углового ускорения должно уменьшать массу топлива. Известно же, что при одинаковом удельном импульсе для сообщения одинакового импульса надо затратить одинаковое количество топлива. А ежели сравнивать ионные двигатели с химическими — тогда тем более, ионным надо меньше рабочего тела.
Ну разве что выставить двигатели ориентации на длинных палках — тогда надо яснее выражаться. И отчего-то никто так не делает.
На всякий случай повторю тезисы статьи, как я их понял. Итак, автор привёл следующую картинку:
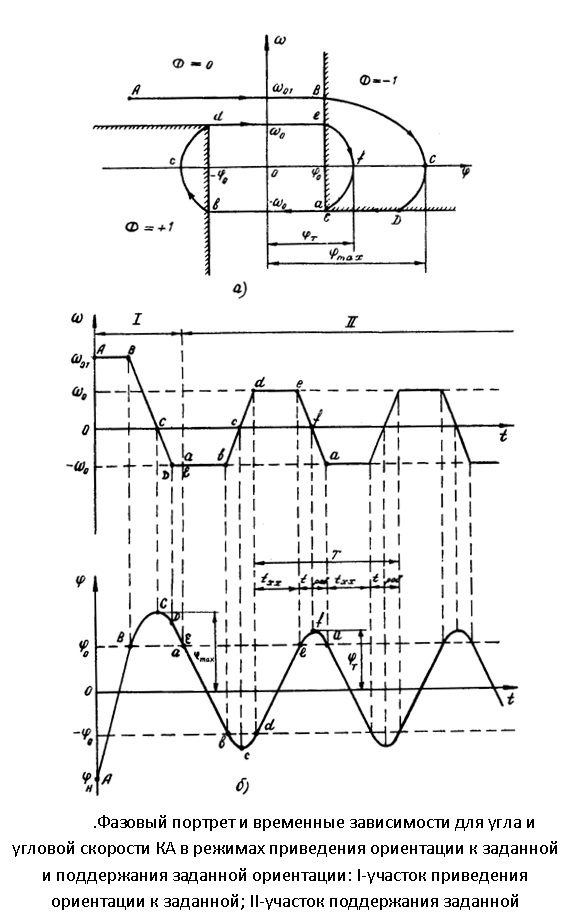
Где φ0 — зона нечувствительности датчика угла, а ω0 — зона нечувствительности датчика угловой скорости, сиречь при отклонениях меньше φ0 и ω0 датчики говорят, что мы ориентированы абсолютно точно и имеем нулевую угловую скорость.
Далее рассматривается отрезок кривой bcd и утверждается следующее — что чем больше угловое ускорение (и, стало быть, тяга двигателя), тем мы быстрее пройдём сей отрезок и тем меньше будет максимальное отклонение φmax (каковое достигается в точке b). И действительно, сложно с этим спорить. В этом смысле можно согласиться — при прочих равных в такой модели φmax тем меньше, чем мощнее двигатель.
Но давайте взглянем на вопрос ширше. Автор приводит формулу, к которой у меня снова нет претензий:
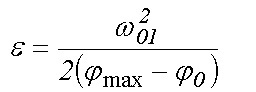
, где ε — угловое ускорение. Что мы видим в этой формуле?
Во-первых, в знаменателе стоит φmax — φ0. То есть, даже имея бесконечно мощный (и бесконечно точный) двигатель, мы лишь сведём максимальное отклонение к погрешности датчика φ0. Что, впрочем, и следовало ожидать. Стало быть, дальнейшего увеличения точности мы можем добиться только уменьшением погрешности датчика.
Во-вторых, в числителе мы с удивлением обнаруживаем ω0, причём в квадрате. А значит, что вместо того, чтобы увеличивать мощность двигателя в четыре раза, можно уменьшить погрешность гироскопа всего в два раза!
Таким образом, вместо того, чтобы увеличивать мощность, мы можем уменьшать погрешность датчиков. Причём улучшение гироскопа даст нам куда больший эффект, чем такое же относительное увеличение мощности, а улучшение датчика ориентации и вовсе даст эффект, недостижимый ни мощностью, ни гироскопом.
Но может быть, датчики уже некуда улучшать? Автор любезно предоставил нам порядки величин погрешностей:
φ0 = 10-2 — 10-3 рад, ω0 = 10-3 — 10-4 рад/с.
10-3 рад — это камера в мобильном телефоне. Ежели нам действительно важна точность, можно сделать звёздную камеру и получше. Насчёт гироскопа не уверен, зато я догадываюсь, как сделать датчик угловой скорости, имея датчик ориентации. Берём старую добрую производную по времени, сиречь делим изменение угла на изменение времени. Ежели мы меряем угол с точностью 10-3, то подождав 10 секунд, получим те самые 10-4/с. А подождав 100 секунд — 10-5/с, 1000 секунд — 10-6/с и т. п. А куда нам, собственно, в космосе спешить? Заметьте, просто проявив чуточку терпения (скажем, 100 секунд), мы добились эффекта, сопоставимого со стократным увеличением мощности нашего двигателя ориентации!
И ежели уж на то пошло, оценим, каким должно быть угловое ускорение, чтобы ошибка от маломощности двигателя (вкупе с несовершенством датчика угловой скорости!) была сопоставима с ошибкой от несовершенства датчика ориентации. Это просто — возведём всё те же 10-4/с в квадрат и поделим на 2*10-3. И получаем 5*10-6/с2.
Грубо говоря, ежели наш спутник суть кольцо массой в одну тонну, а два двигателя ориентации направлены параллельно кольцу, то при означенных автором погрешностях их суммарная тяга должна быть равна 5 грамм-сил. Что вполне вписывается в диапазон ионных двигателей. А всё, что больше, будет уменьшать ошибку, но совершенно несообразно увеличению мощности, как мы видели.
Но, может быть, ежели мы будем уменьшать допустимую ошибку, увеличивая точность датчиков, нам придётся увеличить мощность двигателя? И снова нет! Поскольку ω0 у нас в квадрате, а φ0 в знаменателе в первой степени, при пропорциональном уменьшении этих величин потребная мощность точно так же снижается!
Можно привести аналогию с автомобилем. Известно, что чем мощнее автомобиль, тем он лучше разгоняется. Так давайте сделаем бесконечно мощный автомобиль, чтобы быстрее добираться до работы! Построили, поехали, а тут вдруг оказалось, что на 200 км/ч машина как-то подозрительно хрустит. А тут ещё штраф за превышение выписали. И ладно бы штраф, так ещё и в пробке всё равно два часа стоять пришлось. Вот так же и со спутником — хотя мощность и увеличивает точность, но дальше какого-то предела её увеличивать не имеет смысла.
Более того, чем мощнее двигатель, тем сложнее будет точно дозировать импульс. Посему есть подозрение, что после какого-то предела мощности точность ориентации вновь будет падать. Не говоря уже об том, что внутренности спутника будет болтать, и вряд ли ему это понравится.
Наконец, заметим, что нынче у любого спутника есть маховики. А значит, основная работа по ориентации проводится маховиками, а двигателю вообще не имеет смысла быть заметно мощнее, чем средний момент внешних сил, действующий на корабль.
В общем, мораль сей басни такова. Ежели рассматривать утверждение «чем мощнее двигатели, тем точнее ориентация» — то оно вполне может выполняться, и то не всегда. Но ежели рассмотреть то утверждение, с которого всё началось («чем точнее ориентация, тем мощнее должны быть двигатели») — то на это я вынужден сказать своё твёрдое нет.
Ах да. Ещё непонятно, отчего увеличение углового ускорения должно уменьшать массу топлива. Известно же, что при одинаковом удельном импульсе для сообщения одинакового импульса надо затратить одинаковое количество топлива. А ежели сравнивать ионные двигатели с химическими — тогда тем более, ионным надо меньше рабочего тела.
Ну разве что выставить двигатели ориентации на длинных палках — тогда надо яснее выражаться. И отчего-то никто так не делает.
чтобы расставить все точки над Ё
www.youtube.com/watch?v=5ccWeEFglO8
www.youtube.com/watch?v=5ccWeEFglO8
я не говорил что силой мысли:) я говорил что инерциальное перемещение это тупик, а как неинерциально перемещаться, надежно и безопасно, это уже давайте думать, мне лично пофиг это будет это магия или гравитационный искажатель
paul_155 vs Mightywill:
— У меня дед и отец на уток с луком охотились.
— Этот вид оружия не является перспективным, нужно развивать другие направления.
— Так ты пойми, наконечник должен быть металлический и оперение обязательно должно быть у стрелы…
— У меня дед и отец на уток с луком охотились.
— Этот вид оружия не является перспективным, нужно развивать другие направления.
— Так ты пойми, наконечник должен быть металлический и оперение обязательно должно быть у стрелы…
Зарегистрируйтесь на Хабре, чтобы оставить комментарий
Ликбез по ориентации космического аппарата (КА) или алаверды Mightywill и lozga