Комментарии 43
Наверное, у каждого, кто изучал теорию автоматического управления, в душе не раз появлялись сомнения, каким образом эти два, три или даже десять квадратиков передаточных функций в модели, представляют собой динамику сложного агрегата, типа ядерного реактора или авиационного двигателя.
Эк молодость. Помню народ изучал системы управления МиГ-21. компьютеров в нем не было и все на гидравлике. По причине отсутствия компьютеров видимо как-то сомнений таких не испытывали (смайлик)
Хорошие такие талмуды были
Это полный провал, регулятор ПИД, настроенный на повышение частоты оборотов, не справился с понижением частоты.
Один из шагов настройки ПИД регулятора — это проверка по критериям устойчивости. Это математика. У вас регулятор настроен методом перебора параметров.
Да перебор параметров блоком оптимизации по критерию минимизации среднеквадратичного отклонения.
Но и нечеткая логика настроена таким же методом.
"… Реализуется алгоритм квадратичной интерполяции при одном оптимизируемом параметре (n = 1) и алгоритм преобразований вращения и растяжения-сжатия (n > 1).
Рассмотрим алгоритм при n > 1. Он основан на выполнении преобразований растяжения — сжатия и преобразований вращения для такого преобразования системы координат, при котором матрица вторых производных (матрица Гессе) приближается к единичной, а направления поиска становятся сопряженными. Этот алгоритм использует квадратичную интерполяцию…
Пусть H — симметричная положительно-определенная матрица. Будем строить последовательность матриц..."
Подробнее здесь...
Смело. С чего бы это?
(для примера использование в модели уравнение сохранения импульса выглядит так:
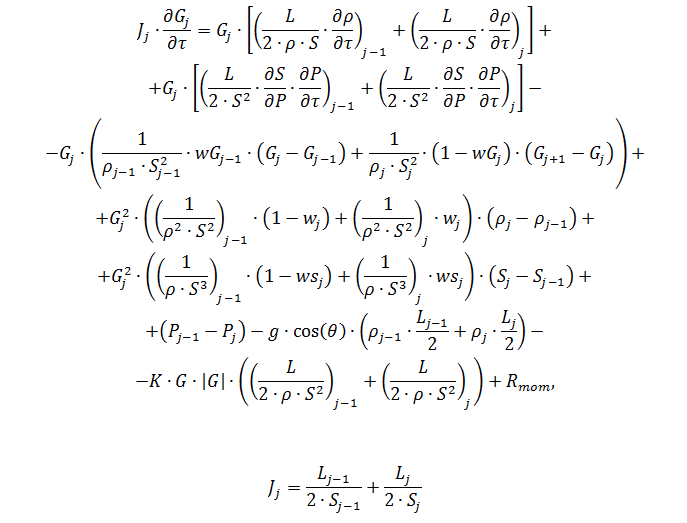 "
" Подробнее здесь...
А сам Симулинк плохо переносит увеличение количества блоков в модели за 500
Симулинк отлично умеет подключать внешние библиотеки, хоть на фортране, хоть на Си, хоть собственно скомпилированные. Это ответ и на моделирование физики, и на количество блоков.
Все верно, только вопрос времени и наглядности. В этом случае пришлось бы прикручивать чужой код на Фортране (двигатель) чужой код на Паскале (Гидравликa) алгоритмы в SimInTech к Simulink. Задача небольшого проекта месяцев так на 2-5. Зачем? Что бы оптимизировать? Так проще специализированные оптимизаторы прицепить к модели общей SimInTech.
А сам Симулинк плохо переносит увеличение количества блоков в модели за 500
Вы поясните, а о чем речь? Если вы говорите о моделировании, то слабо верится, так как симулинк при инициализации моедли её "компилирует", и после этой стадии дальнейшие процессы на количество блоков не завязаны.
Видимо, вы говорите о написанном на Java кросс-платформенном графическом интерфейсе. Я сейчас быстро сделал модель с 3000 блоков (вложенных), у меня все отлично работает. Может, вы 500 элементов на один лист накидали?
Если вы продвигаете свою альтернтивную разработку, то может лучше делать это за счет её преимуществ, а не поиска недостатков у лидера рынка?
видео сравнения
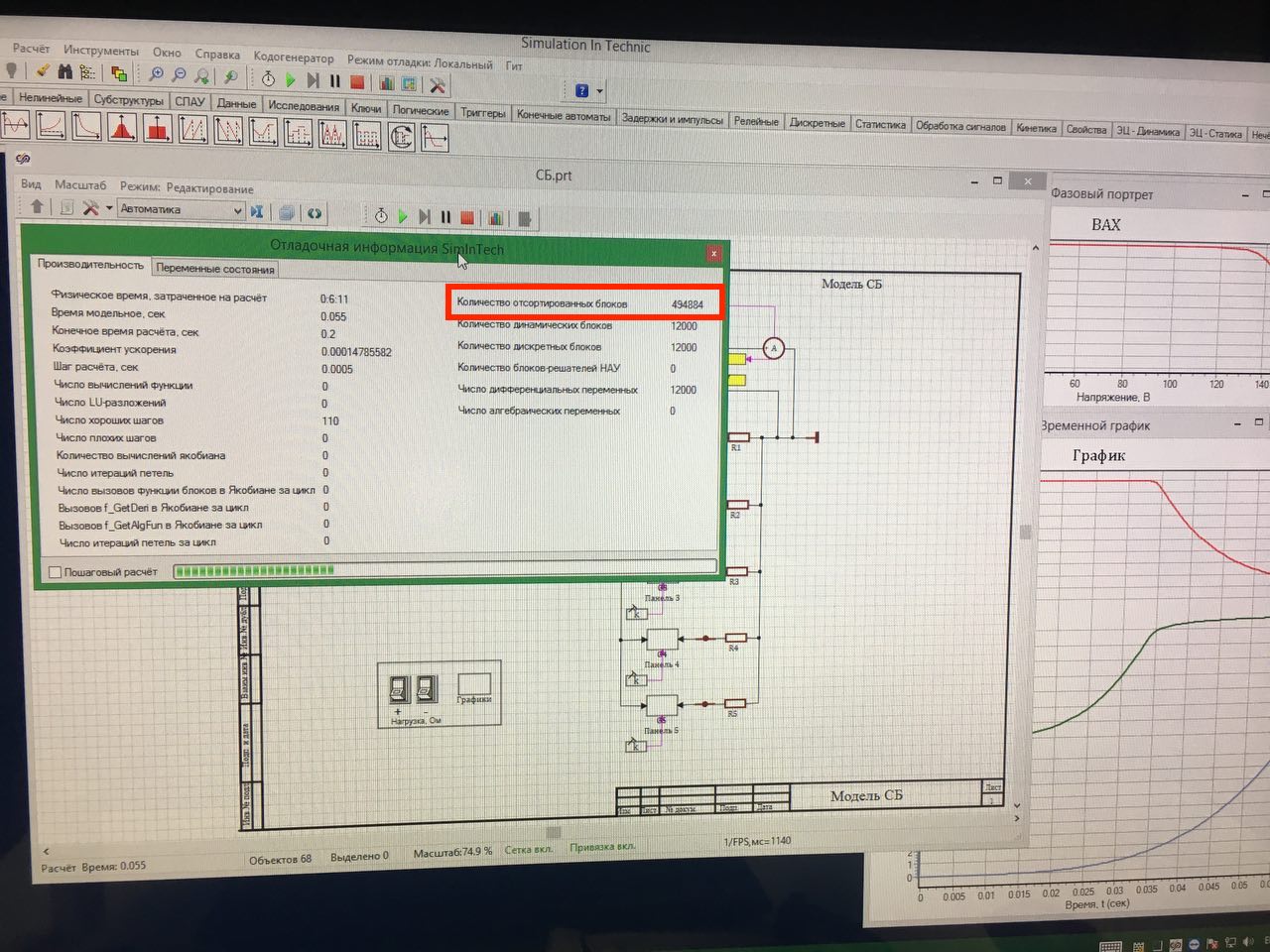
В SimInTech работает картинка с модель где почти пол миллиона блоков.
 "
"А можно картинки в более высоком разрешении выложить?
Просто на картинках в статье ничего не разобрать. В частности ПИД-регулятор интересен, отклик на сброс уставки очень напоминает integral windup, как это по русски, интегральное насыщение? В регуляторе на этот случай что предусмотрено?

В турбореактивном двигателе полезная мощность это реактивная тяга
В гражданских самолётах основную тягу создаёт передний вентилятор, кстати.
Зона нечувствительности у нас 1% от максимальных оборотов – это 40 об/мин. Зададим белый шум равным 50 об/мин.
Можно еще подмешать осцилирующий сигнал с амплитудой = двойной зоне нечувствительности. Тогда ПИД будет стремиться отрабатывать управление с нулевой ошибкой, а не как сейчас зависать на 1%.
Управлять ПИД регулятором на низких оборотах оказалось невозможно.Не совсем корректный вывод. Объекты разные, и коэффициенты ПИД регулятора надо подбирать либо под наихудший объект, либо делать переменными и варьировать от параметров.
клапан. Давление на одной стороне трубы задаём постоянным, считая что там работает топливный насос
В тех системах, которую я знаю, электрического крана нет. Давление создается плунжерным насосом, который вращается от вала турбины. Сам насос может менять свою производительность в зависимости от управляющего давления. При команде уменьшения оборотов, управляющее топливо в течении 2-10 секунд сливается через специальный дроссель, это плавно уменьшает производительность насоса и уменьшает скорость вращения турбины. То есть если на полных оборотах вдруг произойдет обрыв управляющих шлангов, то насос всё равно будет поддерживать минимальный расход топлива. И это не даст пламени форсунок погаснуть. Когда резко дается полный газ, система Командно-топливного агрегата плавно поднимает давление в управляющих шлангах и в течении 30-60 секунд насос выходит на максимальную производительность. Это надо что бы не было помпажа. В управлении нет не одной электрической детали. Всё управление через гидравлику, все переменные связанные со скоростью изменения режима калиброванные дросселя (подбираются при настройке системы). Всё это касается турбин 2 и 3 поколения. Так как создавалось в 70 — 90 годы и ардуины не было даже у китайцев.

А что за софт? Интересно, есть такой GNU для простых смертных?
Рисовать
 "
"Внесу свои 2 копеек:
- На АЭС и ТЭС от использования гидравлической и электро гидравлической системы регулирования Турбин сейчас отказались, заменили на полностью электрическую с ЧРП (на аэс называется "САРЗ — Система Автоматики Регулирования и Защит").
Нечеткая логика против ПИД. Скрещиваем ежа и ужа. Авиадвигатель и алгоритмы управления АЭС