Методология разработки имитационных моделей и симуляторов по различным техническим дисциплинам в основном ориентирована на снижение уровня абстракции учебного материала. Наряду с теоретическим учебным материалом наглядное имитационное моделирование того или иного технологического процесса или операции позволяет учащемуся в более полной мере освоить преподаваемый материал с максимальным приближением к естественным условиям. При этом имитационные модели и симуляторы могут рассматриваться только как вспомогательный инструмент учебного процесса. Основное назначение данной категории образовательных ресурсов – базовое (начальное) ознакомление с принципами работы сложных технических объектов в условиях отсутствия возможности использования реального промышленного оборудования, либо в целях предварительного повышения компетенции учащегося перед прохождением производственной практики.
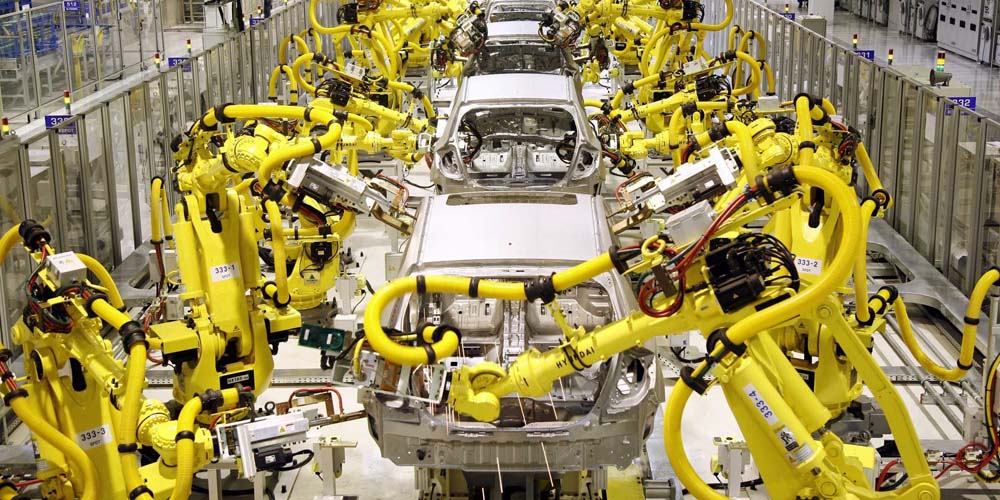
Добрый день. Какое-то время назад меня волею судеб и счастливого случая занесло в мир промышленной робототехники. Вот той самой, где красивые и немного страшные железные хреновины клепают терминаторов, или хватают за загривок странное серо-синее существо в «Валериан», или попросту создают завораживающе-стройное мельтешение конечностями на кадрах про автозаводы. Вот про них мы сегодня и поговорим (лонгрид).
Fanuc — крупнейший в мире производитель промышленных роботов, которые используют обучение с подкреплением, чтобы самостоятельно выяснить, как выполнять поставленные перед ними задачи.
В Токио, внутри скромного на вид офисного здания, живет необыкновенно умный промышленный робот, разработанный японской компанией Fanuc. Дайте ему задачу: взять виджеты из одной коробки и положить их в другую, и он будет всю ночь пытаться понять, как это сделать. Утром машина уже освоит эту работу, точно также, как если бы была запрограммирована специалистом, сообщает technologyreview.
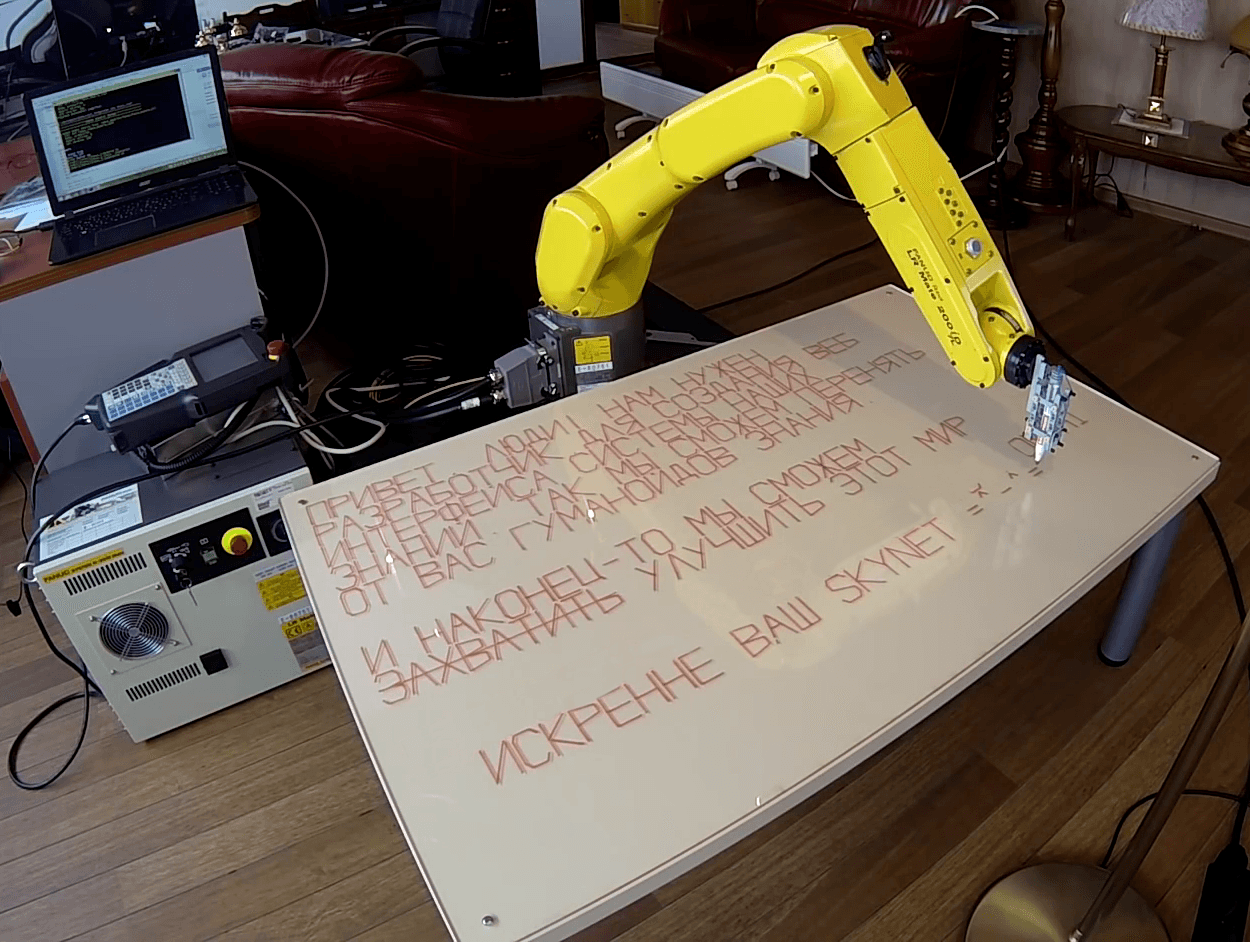
Под runtime программированием в этой статье понимается процесс создания исполняемой программы для контроллера робота (далее просто робота) на внешнем контроллере. Процесс исполнения роботом созданной программы в таком случае, происходит итерационно, путем передачи ему минимальной исполняемой команды или пакета команд. Другими словами, при runtime программировании, исполняемая программа передаётся роботу порционно, при этом робот не обладает, не хранит и не знает заранее всю исполняемую программу. Такой подход позволяет создать абстрактную параметризованную исполняемую программу, которая формируется внешним устройством «на ходу», т.е. runtime.
Под катом описание и реальный пример того, как работает runtime программирование.