Недавно компания AAEON анонсировала одноплатные компьютеры de next-TGU8 и de next-V2K8. Другой производитель — Boardcon — также анонсировал одноплатный компьютер Compact3566 SBC, который будет совместим с Android 11 и Debian 10.
Создание высокопроизводительного кластера с 12 узлами NanoPi-Fire3 менее чем за £100 (£550, включая двенадцать Fire3)
Мой прошлый кластер на Raspberry Pi 3 в прошлом году немало заинтересовал публику, так что я попробовать сделать аналогичные проекты на других отличных одноплатных компьютерах, которые есть на рынке. FriendlyARM из Китая очень щедро отправила мне 12 своих последних 64-битных ARM плат NanoPi-Fire3, на каждой из которых восьмиядерный ARM A53 SoC, работающий на частоте 1,4 ГГц, с гигабитным Ethernet.
2 февраля 2022 года Raspberry Pi Foundation выпустила первый релиз 64-битной Raspberry Pi OS. Ранее данная версия ОС для микрокомпьютеров Raspberry Pi 3 и Raspberry Pi 4 проходила бета-тестирование, а для пользователей был доступна в качестве стабильной только 32-битная версия.
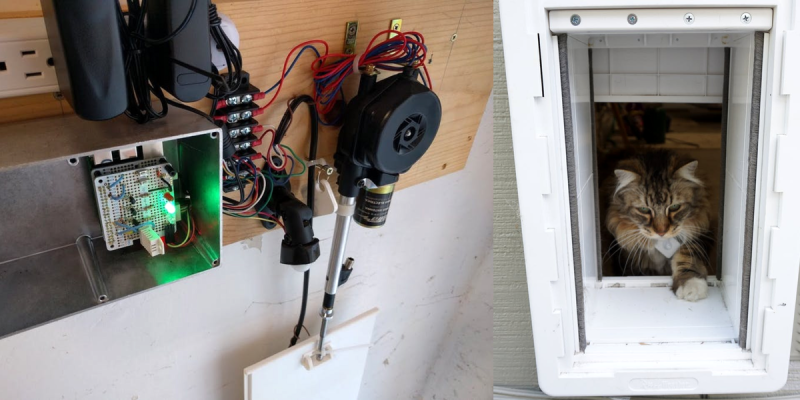
Кошачьи дверцы, популярные у владельцев частных домов, имеют один крупный минус — с их помощью в дом может войти любое животное. Пользователь ресурса Hackster решил эту проблему — он разработал автоматическую дверь для питомца, которая будет открываться только тогда, когда к ней подойдёт животное с корректным Bluetooth-пропуском.
«Цель этого проекта — создать такую дверь для домашних животных, которая позволит нам контролировать, какие животные могут попасть в дом», — заявил Иеремия Мэттисон, автор проекта.
Пользователь твиттера Arturo182 рассказал о создании визуальных эффектов в фильме студии Marvel «Черная вдова». Оказалось, что для них использовали инструмент сканирования, работающий на более чем 200 Raspberry Pi.
Задача: быстро сделать датчик линейного перемещения из компьютерной мышки.
В обычных мышках прячется высокочувствительный оптический датчик. Там скрывается своя маленькая «камера» и процессор обработки, который отслеживает передвижения малейших точек на поверхности. В топовых мышках разрешающая способность составляет всего 3 мкм!
С какими подмышиными камнями мы столкнулись, плюс техническая часть, расскажем дальше!
Это статья написана для напоминания, что умный дом стал намного ближе, чем мы думали.
Home Assistant-это open-source платформа для автоматизации, работающая на Python 3. Позволяет отслеживать и контролировать все устройства в доме и автоматизировать действия. Идеально может работать на одноплатном компьютере Raspberry PI.
Начав изучать ROS (Robotic operation system), сначала поражаешься, как тут «все сложно», от количества информации про топики, ноды,actions голова идет кругом. И, первое желание — вернуться в управлении роботом на старые добрые скрипты. Но нет. Каждый взрослый мужчина должен собрать для мужчины поменьше что-то, что бы ездило, мигало, пищало. В качестве платформы была выбрана ROS, так как все же это следующий шаг в развитии роботов в мире бездушных ардуино. Предлагается собрать ROS «тележку», которая будет не только дешевая, но и функциональная: сможет поехать по линии на полу, вашим котом, вашим телом :) Первые шаги будут такие:
Собрав «бургер» по схеме из прошлого поста, перейдем к программному наполнению.
Так как мы собираем по уже готовому проекту, логично привести инструкции, в нем указанные. Они находятся здесь.
Все очень удобно и там же можно скачать уже готовый образ с Raspbian Stretch + ROS + OpenCV, записать его на sd карту для raspberry. (ROS Kinetic, OpenCV 3.4.1. Да, есть и поновее, но иногда лучше взять и поехать, чем собирать все самому из исходников).
В этой части поговорим о программной составляющей, как оживлялась машинка. Какая ОС использовались, какой язык был выбран, с какими проблемами сталкивался.
В прошлый раз, работая с OpenCV и ROS(robot operating system), используя всю мощь raspberry pi 3b+, удалось поездить по линии, разглядеть улыбки на лицах людей, печальные морды котов и даже поехать к ним навстречу.
Но вместе с обнадеживающими первыми шагами в этой области робототехники, пришлось столкнуться с целым сонмом мелких задач: медленная raspberry pi, небольшое расстояние от камеры, при котором распознавалось лицо, смещение в сторону при езде, иные. Как их решить, в том числе открыть новые небольшие горизонты в освоении ROS будет рассказано далее.
На этом видео показаны: плата Raspberry Pi3, к ней, через разъем GPIO, подключена FPGA плата Марсоход2rpi (Cyclone IV), к которой подключен HDMI монитор. Второй монитор подключен через штатный разъем HDMI Raspberry Pi3. Все вместе работает, как система с двумя мониторами.
При построении карт на роботе в рамках ограниченного пространства проблем не возникает. Управляя роботом с клавиатуры со станции-управления или на самом роботе, можно визуально наблюдать его перемещения и вовремя избегать нежелательные препятствия. Ситуация осложняется, если помещений несколько. И здесь есть несколько вариантов как наблюдать за роботом, строящим карту, если он покинул помещение оператора:
— подключить к непосредственно к роботу камеру;
— воспользоваться существующей системой видеонаблюдения вне робота;
— управлять с wi-fi, bluetooth клавиатуры, находясь рядом с роботом
— «поносить робота на руках», чтобы лидар собрал данные;
— поуправлять роботом с телефона.
Большой опыт работы в сфере промышленной автоматизации и АСУТП, казалось бы, должен способствовать тому, что со временем уже много всего видел и много всего знаешь. Но не тут-то было. Оказывается, иногда могут возникать задачи и проекты, которые трудно реализовать стандартными средствами. Так под один крупный проект по мониторингу и управлению в «облаке» одного небезызвестного завода N требовалось найти подходящее железо. Однако оказалось, что в России по требованиям помехозащищенности устройства и открытости системы ничего подходящего не существует. Попытка заказать идеально подходящее нам устройство из-за рубежа провалилась, поскольку на территорию нашей страны оборудование с пометкой «IoT» весьма трудно ввести в промышленных масштабах. Другие же поставщики не устроили сроками доставки в 12 недель при небольших объемах и ценой. Поэтому в голове родилась и плотно осела мысль о создании своего устройства. Причем такого, чтобы оно было универсальным и подходило не только конкретно под этот один проект, а под множество других. В итоге от момента зарождения идеи, подбора поставщиков и корпуса, разработки платы, её отладки и тестирования, написания инструкций и технической документации прошло весьма много времени. Но зато теперь я держу с легким трепетом в руках полностью законченное и рабочее устройство, и могу заявлять, что мы это сделали!
Проект строился на базе достаточно известного в своих кругах другого проекта — linorobot (linorobot.org), при этом использовались доступные простому обывателю компоненты. Цели, которые были поставлены: добиться автономного перемещения робота в домашних условиях, используя low-cost компоненты, оценить производительность мини-пк для заявленных целей, настроить стек навигации для перемещения в узких пространствах хрущевок.
В прошлой статье, посвященной автономной домашней тележке 2.0, удалось поработать над тем, как:
— улучшить одометрию бюджетного робота,
— добиться построение приемлемой 2d карты помещения, используя slam алгоритмы и доступный лидар,
— внести ясность в иные вопросы при сборке проекта.
В этот раз посмотрим как работает автономная навигация в редакторе rviz, внедрим программы управления роботом, которые позволят уйти из rviz.
Рассмотрим также некоторые «элементы красоты» rviz, которые облегчают жизнь робототехника ROS.
Эта часть цикла статей по навигации домашнего автономного робота на базе open-source linorobot будет суховата на картинки, так как будет большей частью посвящена теории. «Теория, мой друг, суха, но зеленеет жизни древо», -как говорил классик. Заглянем под капот linorobot, разберем подробно составляющие его навигационного стека ROS, а также n-е количество параметров, стандартно используемых в ROS.
В конце небольшой бонус — как прикрутить робота к другому проекту — majordomo и приподнять автоматизацию своего жилища на новый уровень.
Не так давно мы с командой разработали небольшой встраиваемый компьютер для решения задач IIoT и промышленной автоматизации. Первую статью о нашем устройстве можно посмотреть здесь.
Разрабатывать устройство решили на распространенном и оттестированном модуле Raspberry CM3+, что позволило нам создать компьютер с большими вычислительными способностями, огромным сообществом и простотой его использования. Под катом расскажу по этапам, от чего отталкивались и к чему пришли в итоге.