Леонид Маркович Скворцов. Широко известный в узких кругах математик, профессионально занимающийся математическими проблемами автоматического управления. Например, его авторские методы использованы в SimInTech. Данный текст, еще готовится к публикации. Но с разрешения автора, читатели Хабр будут первыми кто сможет оценить. Первая часть здесь... Вторая часть здесь...
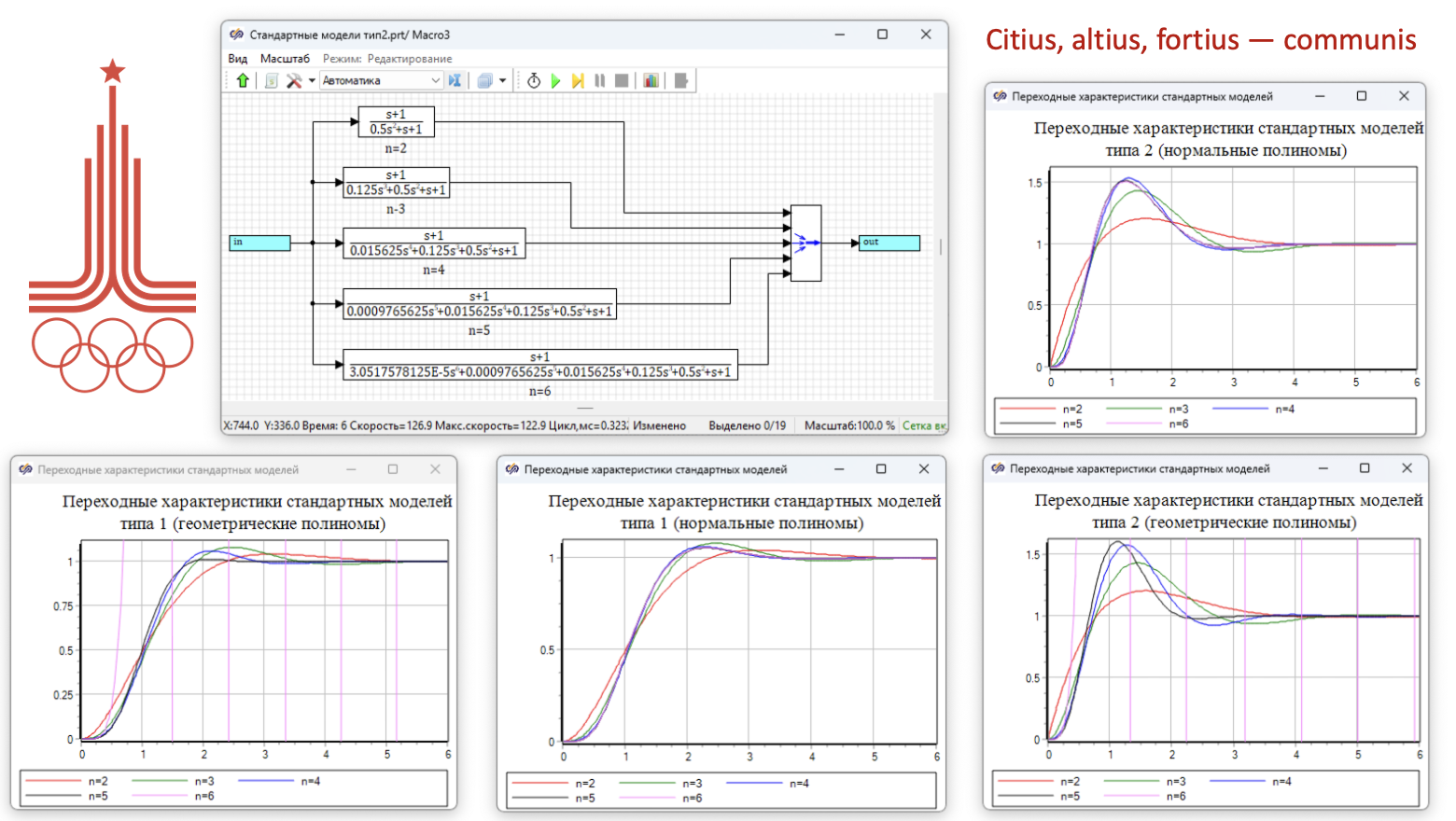
Две предыдущие части были заполнены многоэтажными формулами в третей части разберем на примерах применение этих формул. Математику в жизнь!
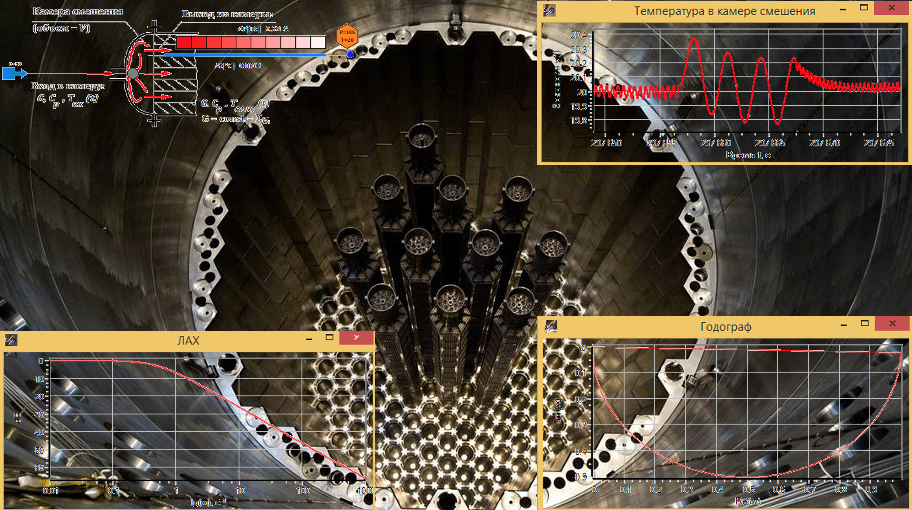
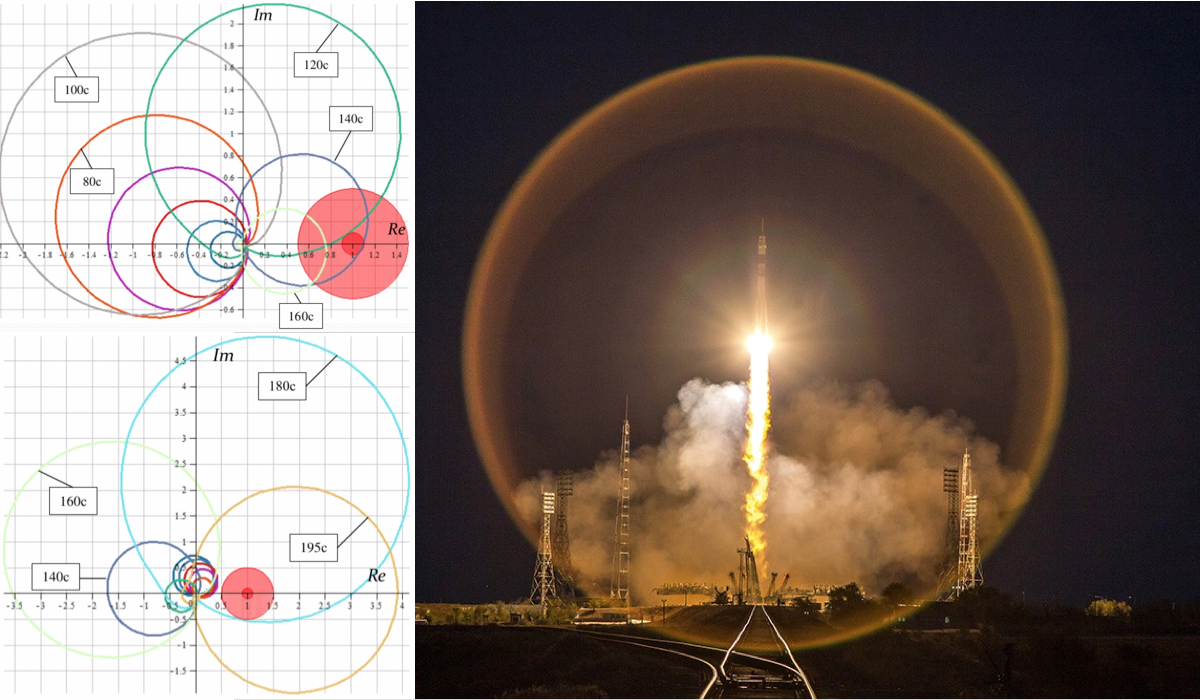
Приведем примеры и покажем в видео как синтезировать регулятор для линейной модели двухроторного газотурбинного двигателя, работающего на базовом режиме малого газа, вместе с исполнительным механизмом. От теории к практике не приходя в сознание!